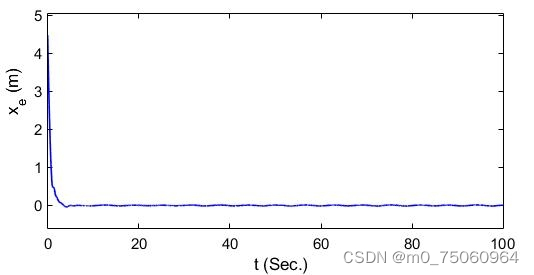
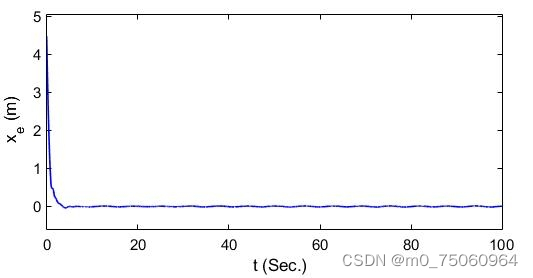
无人船/无人艇路径跟踪控制 fossen模型matlab simulink效果
基于观测器的LOS制导结合反步法控制
ELOS+backstepping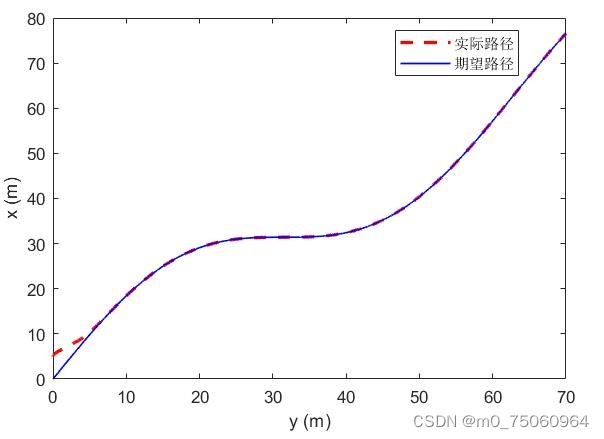
YID:99188660989622243 好的0413
好的0413
版权声明:本文为m0_75060964原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
无人船/无人艇路径跟踪控制 fossen模型matlab simulink效果
基于观测器的LOS制导结合反步法控制
ELOS+backstepping
YID:99188660989622243好的0413