机器人学运动模型
文章目录
DOF (degree of freedom)
每一个robot都有确定的自由度,每个自由度都有一个驱动器那么所有的自由度都是可控的
自由度:
物体能够对坐标系进行独立动作的数目一个物体可以相对于坐标系,进行三个平移和三个旋转运动,即一个简单的物体有六个自由度。

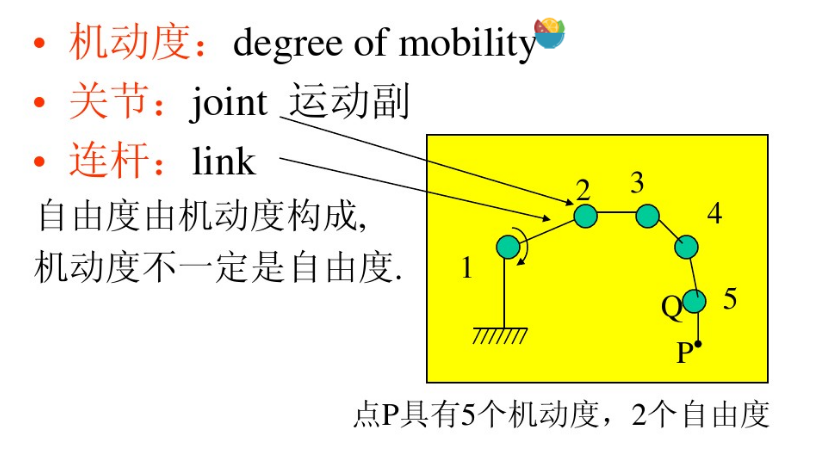
DOM (degree of mobility)
自由度友机动度构成,机动度不一定是自由度
- Holonomic robot
当DOF与DOM相同
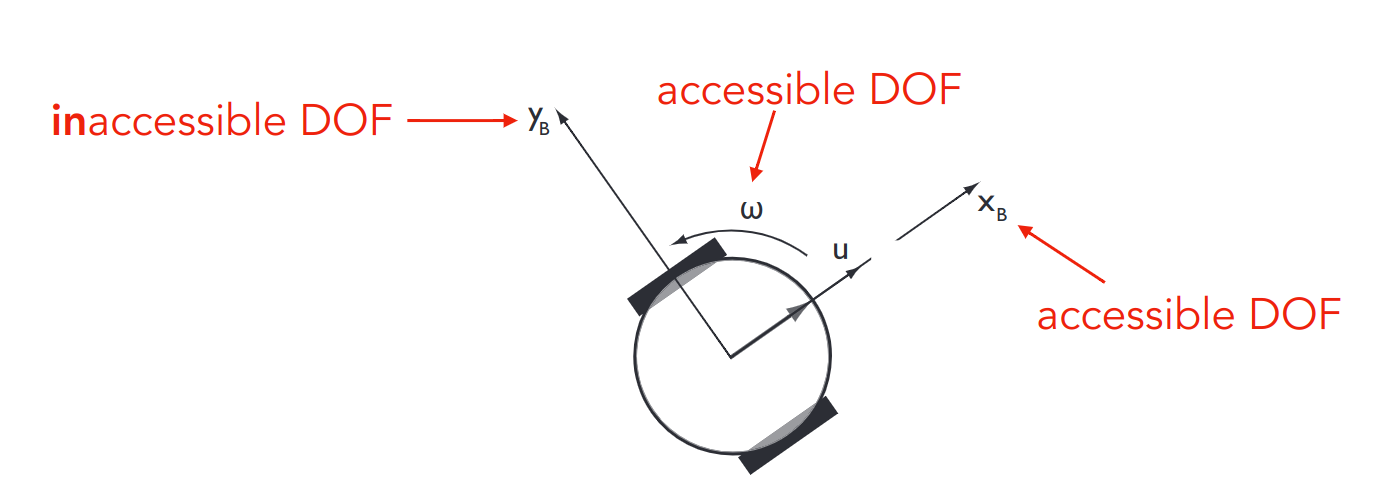
- Non-holonomic robot
当DOF大于DOM
当我们的机器人的DOM比DOF更大时候,会存在冗余驱动
eg. 差数模型
常见运动模型
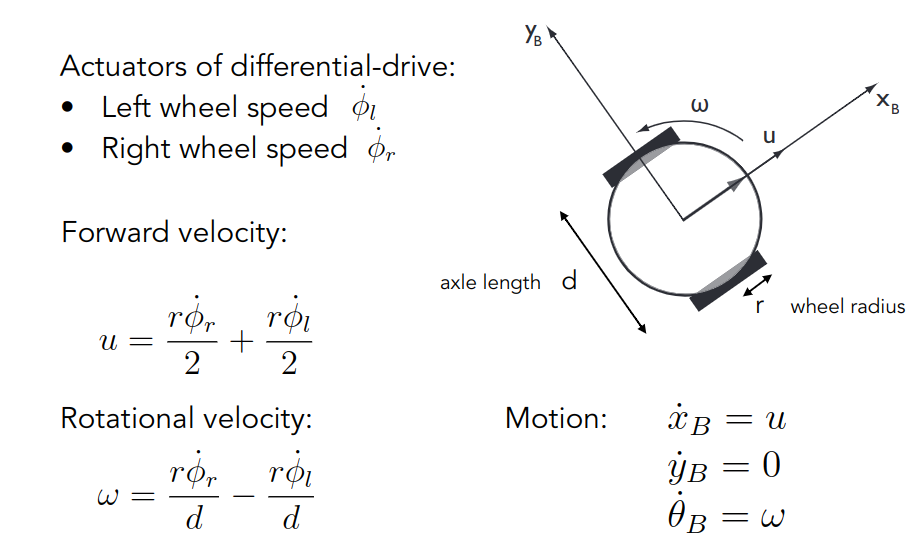
differential-drive model
- 正推:下发u w 机器人能到达的位姿
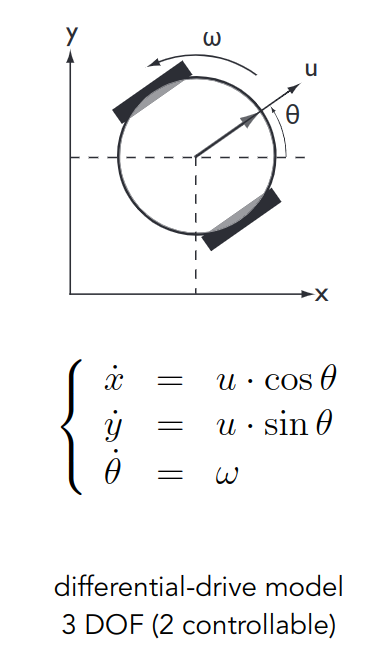
- 反推,为了去某个位置需要下发什么u和w
bicycle model
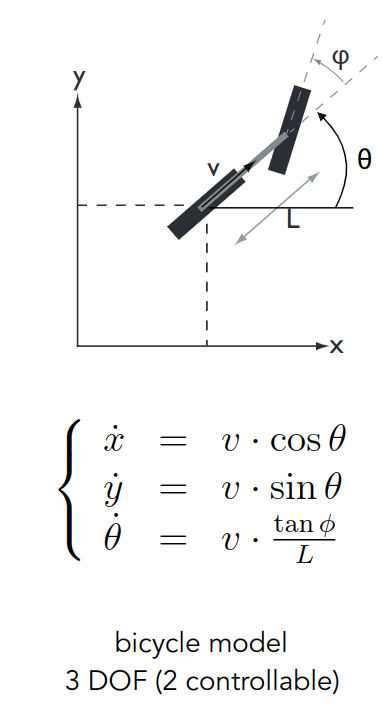
推导过程
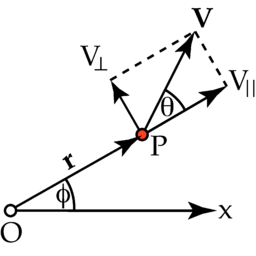
如图所示 V可以分解为 V ∣ ∣ V_{||}V∣∣ 和 V ⊥ V_{\perp }V⊥ 且$V_{\perp }=r\frac{d\alpha }{dt} $、
- 定义角速度 $w=\frac{d\varphi }{dt} $
其中V ⊥ = ∣ v ∣ s i n ( θ ) V_{\perp }=|v|sin(\theta )V⊥=∣v∣sin(θ) 且 v = w r v=wrv=wr
因为在时间很短的情况下直线距离为 d φ = v ∗ c o s ( θ ) d t d\varphi = v*cos(\theta )dtdφ=v∗cos(θ)dt
所以 $w=\frac{|v|sin(\theta )}{|r|} $
最后
上面那个公式其实就是把速度分解成沿轴的速度以及垂直轴的速度>
版权声明:本文为ahelloyou原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。