对于平面连杆类机器人,课本、论文以及实际使用的机器人(SCARA机器人就是平面连杆机器人的变种),基本上都是平面2连杆。即,给定平面坐标(x,y),对应两组(theta1,theta2),通过选接就可以确定唯一解。实际上,由于作业空间等的需求,有时需要平面3连杆机器人来完成平面的定位,即给定平面坐标(x,y),需要求出唯一对应的(theta1、theta2、theta3),对于这种系统,显然有无穷解。为了在只给定(x,y)的情况下,获取唯一对应的(theta1、theta2、theta3),我们需要额外计算出一组条件,我采用的方法是:根据(x,y)计算并指定末端连杆的姿态。
结构与DH表
平面3连杆机器人的结构和各坐标系定义如下(右手坐标系、右手旋转):

其中x0-y0叫做“基坐标系(robot frame)”,该坐标系作为参考坐标系,固定不动;x1-y1固连在第一关节,相对与x0-y0仅有转交角theta1;x2-y2固连在第二关节,相对与x1-y1有转交角theta2和连杆长度L1;x3-y3固连在第三关节,相对与x2-y2有转交角theta3和连杆长度L2;xtool-ytool为固连在第三连杆末端的工具坐标系,相对与x3-y3仅有连杆长度L3。
根据上图,得到标准DH表如下:
| a | alpha | d | theta |
1 | 0 | 0 | 0 | theta1 |
2 | L1 | 0 | 0 | theta2 |
3 | L2 | 0 | 0 | theta3 |
tool | L3 | 0 | 0 | 0 |
运动学正解
使用标准DH法建立DH模型之后,各坐标系之间的齐次变换矩阵使用如下公式求取:

根据上述公式和DH参数,求取:、
、
、
。各齐次矩阵相乘得到:
则表示工具坐标系相对于基座标系的齐次变换矩阵,包含位置和姿态的相对关系,即为正解。
运动学逆解
各个机器人的逆解计算没有统一方法,一般有几何法、代数法、雅可比迭代、非线性寻优等解法,使用几何法来求解平面3R机械臂逆解。因平面3R结构冗余,仅给定XY,无法唯一确定3关节转角度,本文解决方法为:
通过给定XY,来指定末端工具坐标系姿态。如下图所示,3R末端距原点的长度为S,定义图中两向量夹角gamma满足如下关系:
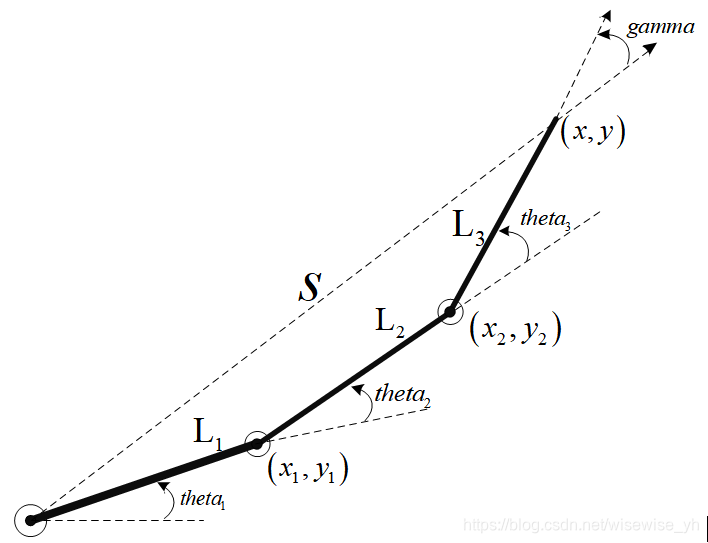
则3R机械臂末端从最远处运行至原点,gamma变化范围为:0~180.
逆解求解过程大致如下:
1)根据给定(x,y),求S、gamma;
2)根据(x,y)、gamma、L3,求第二连杆末端位置(x2,y2);
3)根据(x2,y2),求theta1、theta2、(x1,y1),这里就是平面2连杆的方法,方法比较成熟,不再详细说明;
4)根据(x1,y1)、(x2,y2)、(x,y),求theta3。
【note】:使用该方法,对于3连杆的长度关系有一定要求,具体的我没有推导(感兴趣的可以推导下),一般只要3条连杆长度差不多即可,该方法有唯一解,计算速度快;另外也可以进行迭代求解,计算量会稍大。