18.04 ROS melodic 安装激光雷达YDLIDAR G4
(1) 使用命令创建 catkin_ws 工作空间,终端切换到一个 ROS 工作空间 src 目录下,
catkin_ws 换成你的 ROS 工作空间。
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
$ cd ~/catkin_ws
$ catkin_make
(2)添加 catkin 环境变量到~/.bashrc 文件中,并使其生效。
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc (3)克隆对应雷达型号 ydlidar 工程到你的 ROS 工作空间下的 src 目录中。
(3)克隆对应雷达型号 ydlidar 工程到你的 ROS 工作空间下的 src 目录中。
$ cd ./src
$ git clone https://github.com/YDLIDAR/ydlidar_ros
$ cd ydlidar_ros
$ git checkout G4(这里的型号是ydlidar G4 ,如果你的激光雷达型号是X2、X4…,对应改应例如X2, $git checkout X2
$ cd ../..
(4)编译生成 ydlidar_node 和 ydlidar_client
$catkin_make
(5) 先创建 YDLIDAR 雷达串口别名[/dev/ydlidar]。
$roscd ydlidar/startup
$sudo chmod 0777 *
$sudo sh initenv.sh
!!!注意使用手册的是$roscd ydlidar_ros/startup但是输入出现下面的报错
roscd: No such package/stack 'ydlidar_ros/startup'
我改为$roscd ydlidar/startup就可以了,不知道对后面的学习有没有影响
备注:创建串口别名后, 需要重新插拔 USB 才生效
有两种方式运行 YDLIDAR ROS 驱动包
(1)运行 ydlidar_node 和 rviz
$roslaunch ydlidar lidar_view.launch
###在 rviz 中可看见雷达扫描结果出现红色点云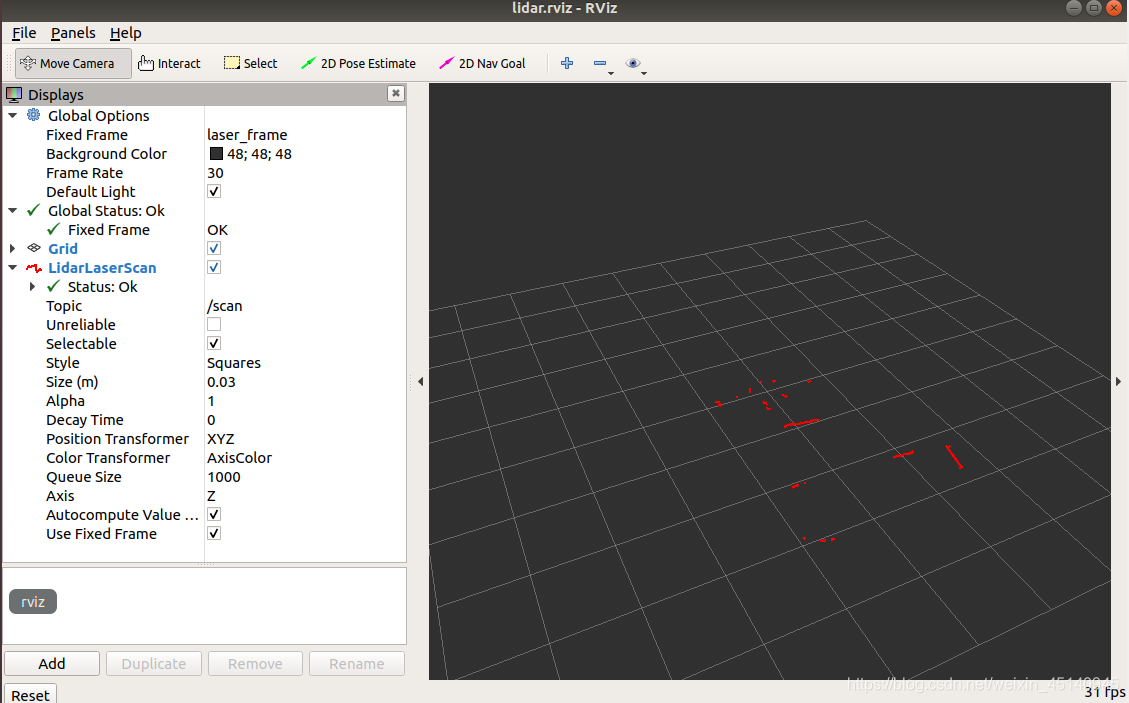
(2)运行 ydlidar_node 和 ydlidar_client
$roslaunch ydlidar lidar.launch
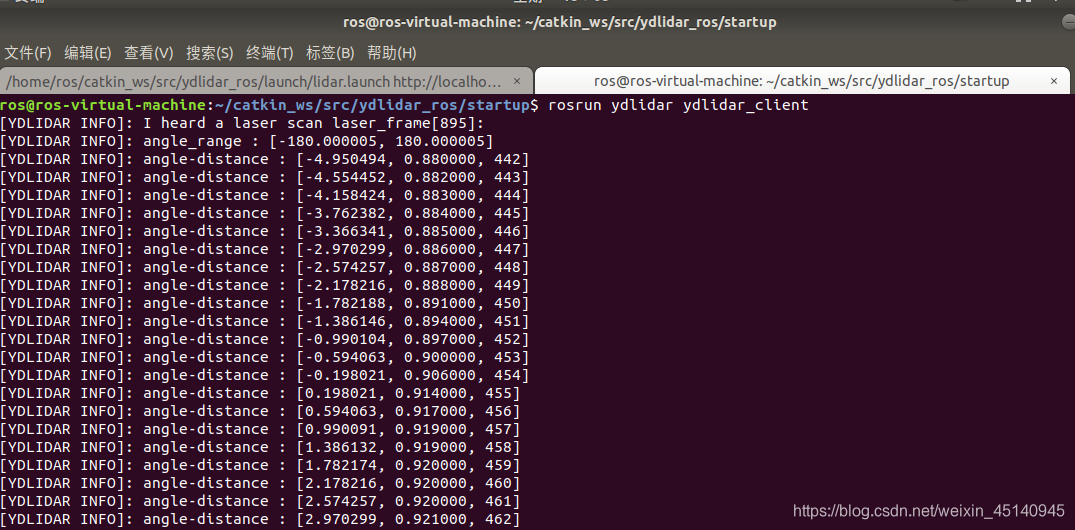
$rosrun ydlidar ydlidar_client
###在终端可看见雷达数据输出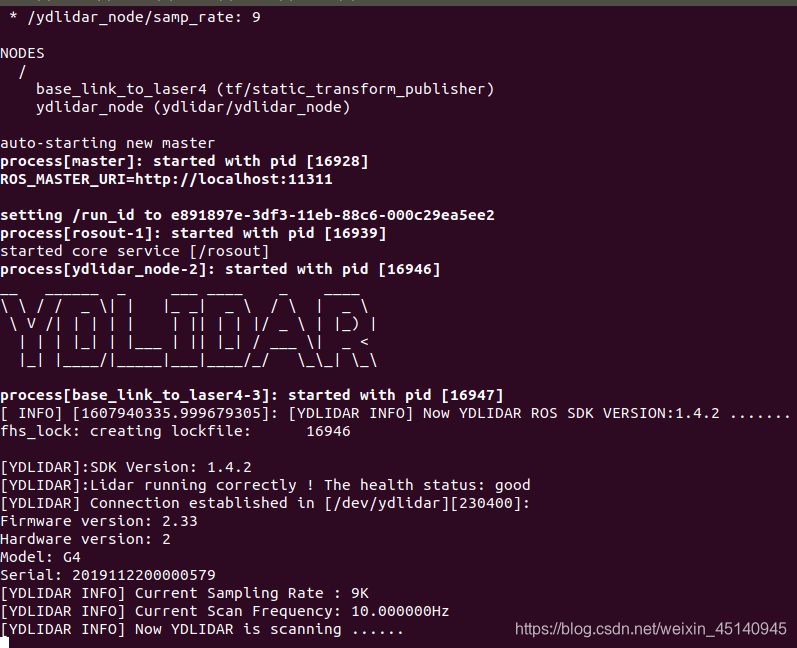
YDLIDAR 坐标系
YDLIDAR 按照顺时针方向旋转。 SDK 数据输出是带距离和角度信息的左手系数据,ROS 驱动包输出已经将其转化为右手坐标系输出,第一个测量数据来自前面。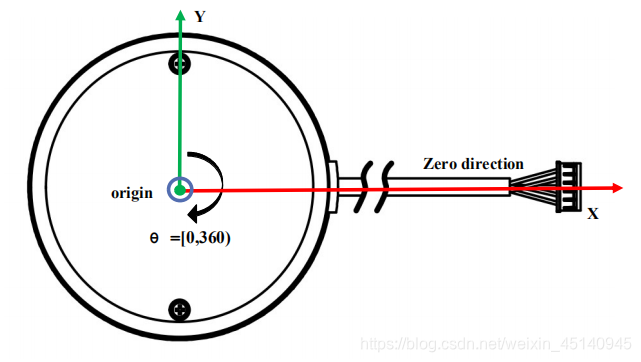
YDLIDAR G2/G4/G6 坐标系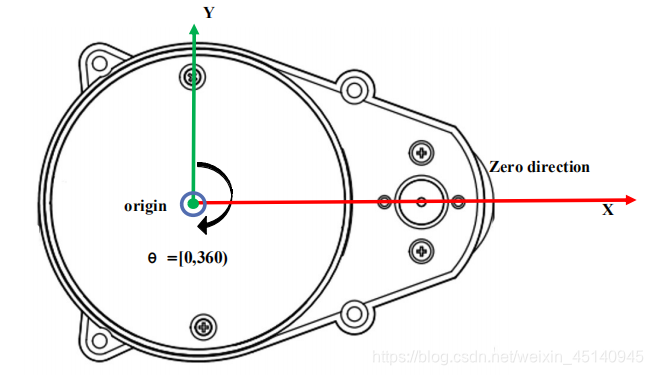
YDLIDAR X4 坐标系
在网址:https://www.ydlidar.cn/service_support/download.html选择ROS下载安装资源
根据你自己购买的型号来下载资源
资源转载:https://www.ydlidar.cn/service_support/download.html