Intel RealSense D435i
一、安装测试librealsense SDK 2.0
方式一(未成功安装)
librealsense SDK相当于相机的驱动,SR300和ZR300的支持驱动是librealsense SDK 1.0,而D435i是librealsense SDK 2.0——————官方安装教程Intel® RealSense™ SDK 2.0
1. 注册公匙
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
2. 添加repositories
Ubuntu 16 LTS:
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
Ubuntu 18 LTS:
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
报错:
E: 无法下载 http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo/dists/bionic/InRelease 403 Forbidden [IP: 52.218.0.218 80]
E: 仓库 “http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic InRelease” 没有数字签名。
N: 无法安全地用该源进行更新,所以默认禁用该源。
N: 参见 apt-secure(8) 手册以了解仓库创建和用户配置方面的细节。
3. 安装library
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
报错:
4. 安装developer和debug packages
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
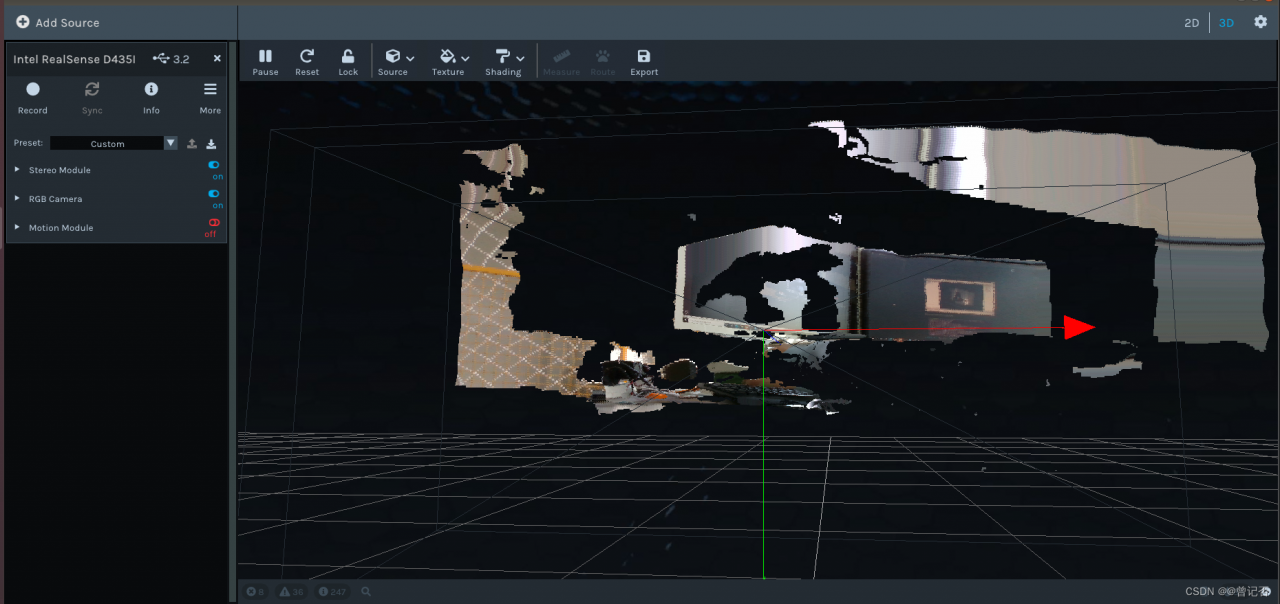
5. 测试SDK
realsense-viewer
运行完上面测试命令之后会弹出来一个看上去还满酷的SDK界面,打开三个按钮可以看到RGB、双目和IMU的结果就证明你的SDK装成功了。
方式二(本次使用 成功)
1. 下载安装包
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
更新软件源,获取最新的稳定的内核,可以用uname -r查看内核,满足4.8及以上就行,有时候会在这里出错,如果内核版本不够高的话。
2. 更新依赖库
sudo apt-get update && sudo apt-get upgrade && sudo apt-get dist-upgrade
3. 安装依赖库
安装一些编译所需的依赖,不同版本系统安装依赖不同,以ubuntu18.04为例需要安装的是:
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
4. 运行脚本
进入到librealsense文件夹目录下,运行Intel Realsense 的许可脚本
./scripts/setup_udev_rules.sh
5. 下载并编译内核模块
./scripts/patch-realsense-ubuntu-lts.sh
这一步要很长时间,连外网会快点。
另外,执行sudo dmesg | tail -n 50可以看到新的uvcvideo驱动已经登记了。
###########运行结果###############################
sfann@sfann-virtual-machine:~/D435i/librealsense$ sudo dmesg | tail -n 50
[ 15.370489] RAPL PMU: hw unit of domain psys 2^-0 Joules
[ 16.314142] AVX2 version of gcm_enc/dec engaged.
[ 16.314143] AES CTR mode by8 optimization enabled
[ 22.329178] audit: type=1400 audit(1652624204.097:2): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/snap/core/12725/usr/lib/snapd/snap-confine" pid=813 comm="apparmor_parser"
[ 22.329180] audit: type=1400 audit(1652624204.097:3): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/snap/core/12725/usr/lib/snapd/snap-confine//mount-namespace-capture-helper" pid=813 comm="apparmor_parser"
[ 22.336127] audit: type=1400 audit(1652624204.101:4): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/sbin/dhclient" pid=812 comm="apparmor_parser"
[ 22.336130] audit: type=1400 audit(1652624204.101:5): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/lib/NetworkManager/nm-dhcp-client.action" pid=812 comm="apparmor_parser"
[ 22.336131] audit: type=1400 audit(1652624204.101:6): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/lib/NetworkManager/nm-dhcp-helper" pid=812 comm="apparmor_parser"
[ 22.336132] audit: type=1400 audit(1652624204.101:7): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/lib/connman/scripts/dhclient-script" pid=812 comm="apparmor_parser"
[ 22.341581] audit: type=1400 audit(1652624204.109:8): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/bin/man" pid=816 comm="apparmor_parser"
[ 22.341583] audit: type=1400 audit(1652624204.109:9): apparmor="STATUS" operation="profile_load" profile="unconfined" name="man_filter" pid=816 comm="apparmor_parser"
[ 22.341584] audit: type=1400 audit(1652624204.109:10): apparmor="STATUS" operation="profile_load" profile="unconfined" name="man_groff" pid=816 comm="apparmor_parser"
[ 22.365700] audit: type=1400 audit(1652624204.133:11): apparmor="STATUS" operation="profile_load" profile="unconfined" name="/usr/sbin/cups-browsed" pid=818 comm="apparmor_parser"
[ 23.322767] NET: Registered protocol family 40
[ 23.598943] Adding 1047548k swap on /dev/sda5. Priority:-2 extents:1 across:1047548k FS
[ 31.401406] IPv6: ADDRCONF(NETDEV_UP): ens33: link is not ready
[ 31.406653] IPv6: ADDRCONF(NETDEV_UP): ens33: link is not ready
[ 31.414323] e1000: ens33 NIC Link is Up 1000 Mbps Full Duplex, Flow Control: None
[ 31.415290] IPv6: ADDRCONF(NETDEV_CHANGE): ens33: link becomes ready
[ 77.691250] systemd-journald[374]: File /var/log/journal/76ea0dfdb2f1489285439ca8aa43ad46/user-1000.journal corrupted or uncleanly shut down, renaming and replacing.
[ 86.214263] ISO 9660 Extensions: Microsoft Joliet Level 3
[ 86.214950] ISO 9660 Extensions: RRIP_1991A
[ 86.399338] rfkill: input handler disabled
[ 91.531125] SGI XFS with ACLs, security attributes, realtime, no debug enabled
[ 91.566506] JFS: nTxBlock = 8192, nTxLock = 65536
[ 91.602079] ntfs: driver 2.1.32 [Flags: R/O MODULE].
[ 91.637737] QNX4 filesystem 0.2.3 registered.
[ 91.729219] raid6: sse2x1 gen() 13408 MB/s
[ 91.777008] raid6: sse2x1 xor() 7464 MB/s
[ 91.824648] raid6: sse2x2 gen() 16331 MB/s
[ 91.872198] raid6: sse2x2 xor() 11164 MB/s
[ 91.920205] raid6: sse2x4 gen() 13969 MB/s
[ 91.968053] raid6: sse2x4 xor() 9204 MB/s
[ 92.016400] raid6: avx2x1 gen() 25069 MB/s
[ 92.064069] raid6: avx2x1 xor() 16626 MB/s
[ 92.111806] raid6: avx2x2 gen() 32793 MB/s
[ 92.160096] raid6: avx2x2 xor() 19053 MB/s
[ 92.208093] raid6: avx2x4 gen() 24681 MB/s
[ 92.255781] raid6: avx2x4 xor() 8268 MB/s
[ 92.255786] raid6: using algorithm avx2x2 gen() 32793 MB/s
[ 92.255787] raid6: .... xor() 19053 MB/s, rmw enabled
[ 92.255789] raid6: using avx2x2 recovery algorithm
[ 92.267133] xor: automatically using best checksumming function avx
[ 92.329871] Btrfs loaded, crc32c=crc32c-intel
[ 4591.987198] media: Linux media interface: v0.10
[ 4591.988442] videodev: loading out-of-tree module taints kernel.
[ 4591.988535] videodev: module verification failed: signature and/or required key missing - tainting kernel
[ 4591.991439] Linux video capture interface: v2.00
[ 4592.090064] usbcore: registered new interface driver uvcvideo
[ 4592.090065] USB Video Class driver (1.1.1)
6. 编译SDK2.0
cd librealsense
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
7. 测试
测试SDK2.0是否成功安装,使用usb3.0接口连上相机,进入到build/examples/capture文件夹中,执行
cd examples/capture
./rs-capture
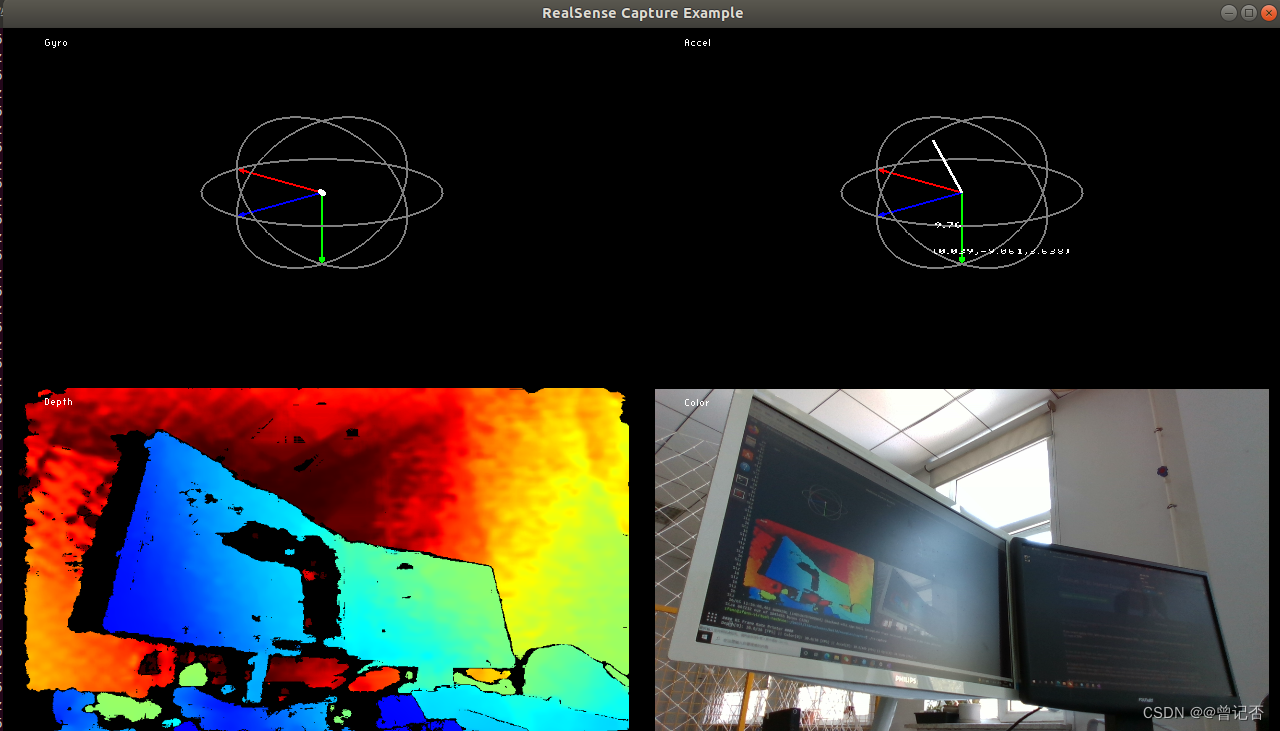
realsense-viewer
二、安装ROS Wrapper —— realsense-ros
1、建立workspace,已经有的可以跳过
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
catkin_init_workspace
cd ..
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
2、在catkin_ws/src/下载源程序
cd src
git clone https://github.com/intel-ros/realsense.git
3、catkin_make
cd ..
catkin_make
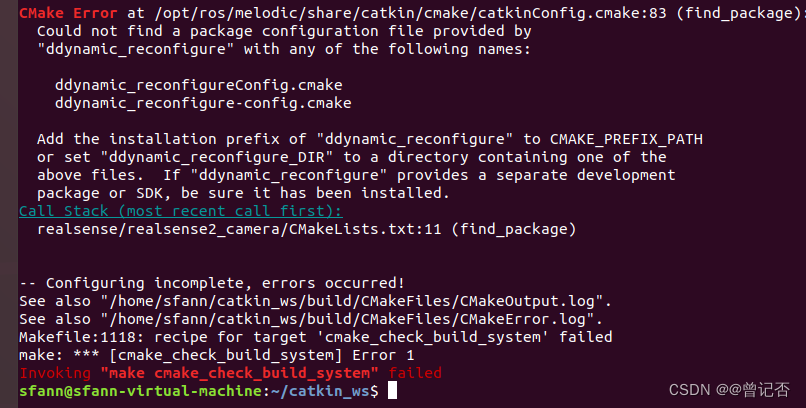
报错:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"ddynamic_reconfigure" with any of the following names:
ddynamic_reconfigureConfig.cmake
ddynamic_reconfigure-config.cmake
Add the installation prefix of "ddynamic_reconfigure" to CMAKE_PREFIX_PATH
or set "ddynamic_reconfigure_DIR" to a directory containing one of the
above files. If "ddynamic_reconfigure" provides a separate development
package or SDK, be sure it has been installed.
Call Stack (most recent call first):
realsense/realsense2_camera/CMakeLists.txt:11 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/sfann/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/sfann/catkin_ws/build/CMakeFiles/CMakeError.log".
Makefile:1118: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
原因:
realsense/realsense2_camera/CMakeLists.txt:11 (find_package)
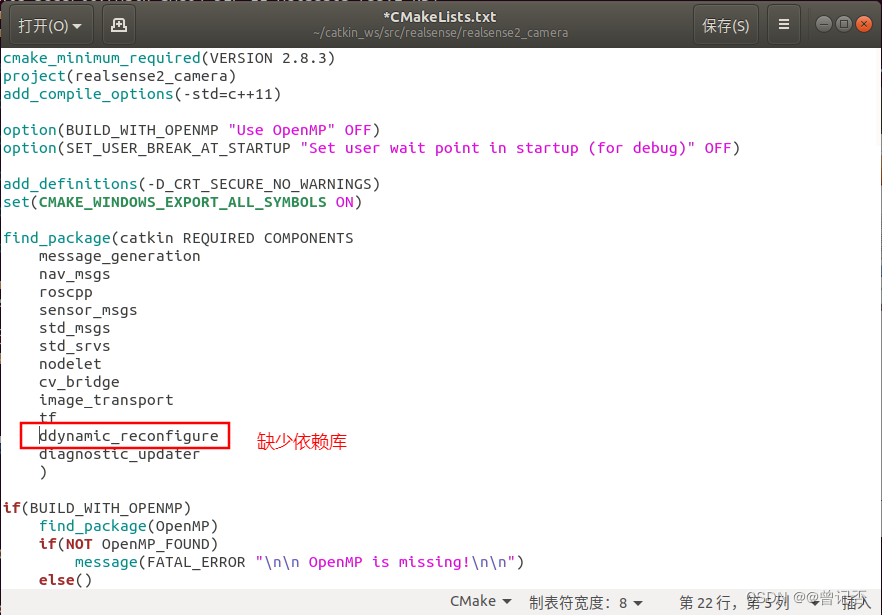
解决办法:
sudo apt-get install ros-melodic-ddynamic-reconfigure
sfann@sfann-virtual-machine:~/catkin_ws$ roslaunch realsense2_camera rs_camera.launch
Traceback (most recent call last):
File "/opt/ros/melodic/bin/roslaunch", line 34, in <module>
import roslaunch
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslaunch/__init__.py", line 39, in <module>
import rospkg
ImportError: No module named rospkg
4、如果没有错误说明,已经装好了,启动相机节点
roslaunch realsense2_camera rs_rgbd.launch
报错:
sfann@sfann-virtual-machine:~/catkin_ws$ roslaunch realsense2_camera rs_rgbd.launch
Traceback (most recent call last):
File "/opt/ros/melodic/bin/roslaunch", line 34, in <module>
import roslaunch
File "/opt/ros/melodic/lib/python2.7/dist-packages/roslaunch/__init__.py", line 39, in <module>
import rospkg
ImportError: No module named rospkg
解决办法:
sfann@sfann-virtual-machine:~/catkin_ws$ pip install -U rospkg
Collecting rospkg
Downloading https://files.pythonhosted.org/packages/2a/80/ac835a4acaf97ab545bff52cd147cd5a3d53d9519cdfeaff2f8961b07772/rospkg-1.4.0.tar.gz (41kB)
100% |████████████████████████████████| 51kB 112kB/s
Collecting catkin_pkg (from rospkg)
Downloading https://files.pythonhosted.org/packages/52/d1/3fa5d3de65798a33100f7d07ded7fb86c5d63534111baa4959993701c1d4/catkin_pkg-0.5.0.tar.gz (62kB)
100% |████████████████████████████████| 71kB 92kB/s
Collecting PyYAML (from rospkg)
Using cached https://files.pythonhosted.org/packages/ba/d4/3cf562876e0cda0405e65d351b835077ab13990e5b92912ef2bf1a2280e0/PyYAML-5.4.1-cp27-cp27mu-manylinux1_x86_64.whl
Collecting docutils (from catkin_pkg->rospkg)
Downloading https://files.pythonhosted.org/packages/8d/14/69b4bad34e3f250afe29a854da03acb6747711f3df06c359fa053fae4e76/docutils-0.18.1-py2.py3-none-any.whl (570kB)
100% |████████████████████████████████| 573kB 12kB/s
Collecting python-dateutil (from catkin_pkg->rospkg)
Using cached https://files.pythonhosted.org/packages/36/7a/87837f39d0296e723bb9b62bbb257d0355c7f6128853c78955f57342a56d/python_dateutil-2.8.2-py2.py3-none-any.whl
Collecting pyparsing (from catkin_pkg->rospkg)
Using cached https://files.pythonhosted.org/packages/8a/bb/488841f56197b13700afd5658fc279a2025a39e22449b7cf29864669b15d/pyparsing-2.4.7-py2.py3-none-any.whl
Collecting setuptools (from catkin_pkg->rospkg)
Using cached https://files.pythonhosted.org/packages/e1/b7/182161210a13158cd3ccc41ee19aadef54496b74f2817cc147006ec932b4/setuptools-44.1.1-py2.py3-none-any.whl
Collecting six>=1.5 (from python-dateutil->catkin_pkg->rospkg)
Using cached https://files.pythonhosted.org/packages/d9/5a/e7c31adbe875f2abbb91bd84cf2dc52d792b5a01506781dbcf25c91daf11/six-1.16.0-py2.py3-none-any.whl
Building wheels for collected packages: rospkg, catkin-pkg
Running setup.py bdist_wheel for rospkg ... done
Stored in directory: /home/sfann/.cache/pip/wheels/24/c6/77/53579e95e74d5d61dc451ab67be41649a405c4c6cfc02932d5
Running setup.py bdist_wheel for catkin-pkg ... done
Stored in directory: /home/sfann/.cache/pip/wheels/17/74/2c/92aedace906f9f08496e1cda8754f47b4ca7f9731a11f1ae80
Successfully built rospkg catkin-pkg
Installing collected packages: docutils, six, python-dateutil, pyparsing, setuptools, catkin-pkg, PyYAML, rospkg
Successfully installed PyYAML-5.4.1 catkin-pkg-0.5.0 docutils-0.18.1 pyparsing-2.4.7 python-dateutil-2.8.2 rospkg-1.4.0 setuptools-44.1.1 six-1.16.0
报错:
sfann@sfann-virtual-machine:~/catkin_ws$ roslaunch realsense2_camera rs_rgbd.launch
... logging to /home/sfann/.ros/log/e1ae5558-d4e5-11ec-90a4-000c298e2de6/roslaunch-sfann-virtual-machine-2498.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Resource not found: rgbd_launch
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/sfann/catkin_ws/src
ROS path [2]=/home/sfann/catkfu_ws/src
ROS path [3]=/opt/ros/melodic/share
The traceback for the exception was written to the log file
解决办法:
sudo apt-get install ros-melodic-rgbd-launch
5、看一下发布的topic
rostopic list
sfann@sfann-virtual-machine:~/catkin_ws$ rostopic list
/camera/align_to_color/parameter_descriptions
/camera/align_to_color/parameter_updates
/camera/aligned_depth_to_color/camera_info
/camera/aligned_depth_to_color/image_raw
/camera/aligned_depth_to_color/image_raw/compressed
/camera/aligned_depth_to_color/image_raw/compressed/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressed/parameter_updates
/camera/aligned_depth_to_color/image_raw/compressedDepth
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/compressedDepth/parameter_updates
/camera/aligned_depth_to_color/image_raw/theora
/camera/aligned_depth_to_color/image_raw/theora/parameter_descriptions
/camera/aligned_depth_to_color/image_raw/theora/parameter_updates
/camera/color/camera_info
/camera/color/image_raw
/camera/color/image_raw/compressed
/camera/color/image_raw/compressed/parameter_descriptions
/camera/color/image_raw/compressed/parameter_updates
/camera/color/image_raw/compressedDepth
/camera/color/image_raw/compressedDepth/parameter_descriptions
/camera/color/image_raw/compressedDepth/parameter_updates
/camera/color/image_raw/theora
/camera/color/image_raw/theora/parameter_descriptions
/camera/color/image_raw/theora/parameter_updates
/camera/color/image_rect_color
/camera/color/image_rect_color/compressed
/camera/color/image_rect_color/compressed/parameter_descriptions
/camera/color/image_rect_color/compressed/parameter_updates
/camera/color/image_rect_color/compressedDepth
/camera/color/image_rect_color/compressedDepth/parameter_descriptions
/camera/color/image_rect_color/compressedDepth/parameter_updates
/camera/color/image_rect_color/theora
/camera/color/image_rect_color/theora/parameter_descriptions
/camera/color/image_rect_color/theora/parameter_updates
/camera/color/metadata
/camera/color_rectify_color/parameter_descriptions
/camera/color_rectify_color/parameter_updates
/camera/depth/camera_info
/camera/depth/image_rect_raw
/camera/depth/image_rect_raw/compressed
/camera/depth/image_rect_raw/compressed/parameter_descriptions
/camera/depth/image_rect_raw/compressed/parameter_updates
/camera/depth/image_rect_raw/compressedDepth
/camera/depth/image_rect_raw/compressedDepth/parameter_descriptions
/camera/depth/image_rect_raw/compressedDepth/parameter_updates
/camera/depth/image_rect_raw/theora
/camera/depth/image_rect_raw/theora/parameter_descriptions
/camera/depth/image_rect_raw/theora/parameter_updates
/camera/depth/metadata
/camera/depth_registered/points
/camera/extrinsics/depth_to_color
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/auto_exposure_roi/parameter_descriptions
/camera/rgb_camera/auto_exposure_roi/parameter_updates
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/diagnostics
/rosout
/rosout_agg
/tf
/tf_static
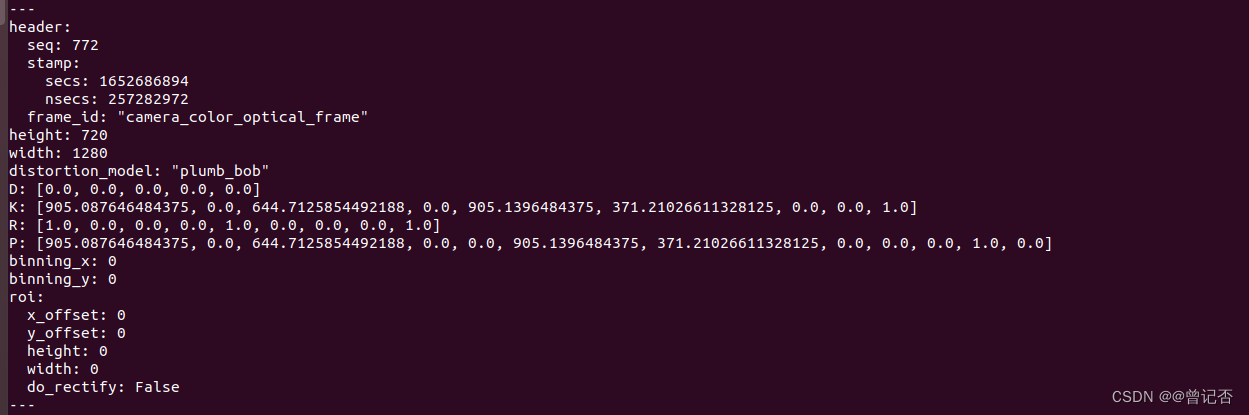
三、查看相机内参
方法一:
在运行D435i以后
rostopic echo /camera/color/camera_info
rostopic echo /camera/aligned_depth_to_color/camera_info
topic中所有aligned_depth_to_color是指已经将深度信息通过相机到RGBD的外参映射到彩色图像上
方法二:
sfann@sfann-virtual-machine:~/catkin_ws$ rs-sensor-control
======================================================
Found the following devices:
0 : Intel RealSense D435I #139*******3
Select a device by index: 0
Device information:
Name : Intel RealSense D435I
Serial Number : 13*********03
Firmware Version : 05.13.00.50
Recommended Firmware Version : 05.13.00.50
Physical Port : /sys/devices/pci0000:00/0000:00:15.0/0000:03:00.0/usb4/4-1/4-1:1.0/video4linux/video0
Debug Op Code : 15
Advanced Mode : YES
Product Id : 0B3A
Camera Locked : YES
Usb Type Descriptor : 3.2
Product Line : D400
Asic Serial Number : 124423062257
Firmware Update Id : 124423062257
Ip Address : N/A
======================================================
Device consists of 3 sensors:
0 : Stereo Module
1 : RGB Camera
2 : Motion Module
Select a sensor by index: 0
======================================================
What would you like to do with the sensor?
0 : Control sensor's options
1 : Control sensor's streams
2 : Show stream intrinsics
3 : Display extrinsics
Select an action: 2
======================================================
Sensor consists of 3 streams:
- Depth #0
- Infrared #1
- Infrared #2
Sensor provides the following stream profiles:
0 : Infrared #1 (Video Stream: Y8 1280x800@ 30Hz)
1 : Infrared #1 (Video Stream: Y16 1280x800@ 25Hz)
2 : Infrared #1 (Video Stream: Y16 1280x800@ 15Hz)
3 : Infrared #1 (Video Stream: Y8 1280x800@ 15Hz)
4 : Infrared #1 (Video Stream: Y8 1280x720@ 30Hz)
5 : Infrared #1 (Video Stream: Y8 1280x720@ 15Hz)
6 : Infrared #1 (Video Stream: Y8 1280x720@ 6Hz)
7 : Infrared #1 (Video Stream: Y8 848x480@ 90Hz)
8 : Infrared #1 (Video Stream: Y8 848x480@ 60Hz)
9 : Infrared #1 (Video Stream: Y8 848x480@ 30Hz)
10 : Infrared #1 (Video Stream: Y8 848x480@ 15Hz)
11 : Infrared #1 (Video Stream: Y8 848x480@ 6Hz)
12 : Infrared #1 (Video Stream: Y8 848x100@ 300Hz)
13 : Infrared #1 (Video Stream: Y8 848x100@ 100Hz)
14 : Infrared #1 (Video Stream: Y8 640x480@ 90Hz)
15 : Infrared #1 (Video Stream: Y8 640x480@ 60Hz)
16 : Infrared #1 (Video Stream: Y8 640x480@ 30Hz)
17 : Infrared #1 (Video Stream: Y8 640x480@ 15Hz)
18 : Infrared #1 (Video Stream: Y8 640x480@ 6Hz)
19 : Infrared #1 (Video Stream: Y16 640x400@ 25Hz)
20 : Infrared #1 (Video Stream: Y16 640x400@ 15Hz)
21 : Infrared #1 (Video Stream: Y8 640x360@ 90Hz)
22 : Infrared #1 (Video Stream: Y8 640x360@ 60Hz)
23 : Infrared #1 (Video Stream: Y8 640x360@ 30Hz)
24 : Infrared #1 (Video Stream: Y8 640x360@ 15Hz)
25 : Infrared #1 (Video Stream: Y8 640x360@ 6Hz)
26 : Infrared #1 (Video Stream: Y8 480x270@ 90Hz)
27 : Infrared #1 (Video Stream: Y8 480x270@ 60Hz)
28 : Infrared #1 (Video Stream: Y8 480x270@ 30Hz)
29 : Infrared #1 (Video Stream: Y8 480x270@ 15Hz)
30 : Infrared #1 (Video Stream: Y8 480x270@ 6Hz)
31 : Infrared #1 (Video Stream: Y8 424x240@ 90Hz)
32 : Infrared #1 (Video Stream: Y8 424x240@ 60Hz)
33 : Infrared #1 (Video Stream: Y8 424x240@ 30Hz)
34 : Infrared #1 (Video Stream: Y8 424x240@ 15Hz)
35 : Infrared #1 (Video Stream: Y8 424x240@ 6Hz)
36 : Infrared #2 (Video Stream: Y8 1280x800@ 30Hz)
37 : Infrared #2 (Video Stream: Y16 1280x800@ 25Hz)
38 : Infrared #2 (Video Stream: Y16 1280x800@ 15Hz)
39 : Infrared #2 (Video Stream: Y8 1280x800@ 15Hz)
40 : Infrared #2 (Video Stream: Y8 1280x720@ 30Hz)
41 : Infrared #2 (Video Stream: Y8 1280x720@ 15Hz)
42 : Infrared #2 (Video Stream: Y8 1280x720@ 6Hz)
43 : Infrared #2 (Video Stream: Y8 848x480@ 90Hz)
44 : Infrared #2 (Video Stream: Y8 848x480@ 60Hz)
45 : Infrared #2 (Video Stream: Y8 848x480@ 30Hz)
46 : Infrared #2 (Video Stream: Y8 848x480@ 15Hz)
47 : Infrared #2 (Video Stream: Y8 848x480@ 6Hz)
48 : Infrared #2 (Video Stream: Y8 848x100@ 300Hz)
49 : Infrared #2 (Video Stream: Y8 848x100@ 100Hz)
50 : Infrared #2 (Video Stream: Y8 640x480@ 90Hz)
51 : Infrared #2 (Video Stream: Y8 640x480@ 60Hz)
52 : Infrared #2 (Video Stream: Y8 640x480@ 30Hz)
53 : Infrared #2 (Video Stream: Y8 640x480@ 15Hz)
54 : Infrared #2 (Video Stream: Y8 640x480@ 6Hz)
55 : Infrared #2 (Video Stream: Y16 640x400@ 25Hz)
56 : Infrared #2 (Video Stream: Y16 640x400@ 15Hz)
57 : Infrared #2 (Video Stream: Y8 640x360@ 90Hz)
58 : Infrared #2 (Video Stream: Y8 640x360@ 60Hz)
59 : Infrared #2 (Video Stream: Y8 640x360@ 30Hz)
60 : Infrared #2 (Video Stream: Y8 640x360@ 15Hz)
61 : Infrared #2 (Video Stream: Y8 640x360@ 6Hz)
62 : Infrared #2 (Video Stream: Y8 480x270@ 90Hz)
63 : Infrared #2 (Video Stream: Y8 480x270@ 60Hz)
64 : Infrared #2 (Video Stream: Y8 480x270@ 30Hz)
65 : Infrared #2 (Video Stream: Y8 480x270@ 15Hz)
66 : Infrared #2 (Video Stream: Y8 480x270@ 6Hz)
67 : Infrared #2 (Video Stream: Y8 424x240@ 90Hz)
68 : Infrared #2 (Video Stream: Y8 424x240@ 60Hz)
69 : Infrared #2 (Video Stream: Y8 424x240@ 30Hz)
70 : Infrared #2 (Video Stream: Y8 424x240@ 15Hz)
71 : Infrared #2 (Video Stream: Y8 424x240@ 6Hz)
72 : Depth #0 (Video Stream: Z16 1280x720@ 30Hz)
73 : Depth #0 (Video Stream: Z16 1280x720@ 15Hz)
74 : Depth #0 (Video Stream: Z16 1280x720@ 6Hz)
75 : Depth #0 (Video Stream: Z16 848x480@ 90Hz)
76 : Depth #0 (Video Stream: Z16 848x480@ 60Hz)
77 : Depth #0 (Video Stream: Z16 848x480@ 30Hz)
78 : Depth #0 (Video Stream: Z16 848x480@ 15Hz)
79 : Depth #0 (Video Stream: Z16 848x480@ 6Hz)
80 : Depth #0 (Video Stream: Z16 848x100@ 300Hz)
81 : Depth #0 (Video Stream: Z16 848x100@ 100Hz)
82 : Depth #0 (Video Stream: Z16 640x480@ 90Hz)
83 : Depth #0 (Video Stream: Z16 640x480@ 60Hz)
84 : Depth #0 (Video Stream: Z16 640x480@ 30Hz)
85 : Depth #0 (Video Stream: Z16 640x480@ 15Hz)
86 : Depth #0 (Video Stream: Z16 640x480@ 6Hz)
87 : Depth #0 (Video Stream: Z16 640x360@ 90Hz)
88 : Depth #0 (Video Stream: Z16 640x360@ 60Hz)
89 : Depth #0 (Video Stream: Z16 640x360@ 30Hz)
90 : Depth #0 (Video Stream: Z16 640x360@ 15Hz)
91 : Depth #0 (Video Stream: Z16 640x360@ 6Hz)
92 : Depth #0 (Video Stream: Z16 480x270@ 90Hz)
93 : Depth #0 (Video Stream: Z16 480x270@ 60Hz)
94 : Depth #0 (Video Stream: Z16 480x270@ 30Hz)
95 : Depth #0 (Video Stream: Z16 480x270@ 15Hz)
96 : Depth #0 (Video Stream: Z16 480x270@ 6Hz)
97 : Depth #0 (Video Stream: Z16 424x240@ 90Hz)
98 : Depth #0 (Video Stream: Z16 424x240@ 60Hz)
99 : Depth #0 (Video Stream: Z16 424x240@ 30Hz)
100: Depth #0 (Video Stream: Z16 424x240@ 15Hz)
101: Depth #0 (Video Stream: Z16 424x240@ 6Hz)
102: Depth #0 (Video Stream: Z16 256x144@ 300Hz)
103: Depth #0 (Video Stream: Z16 256x144@ 90Hz)
Please select the desired streaming profile: 0
Principal Point : 654.028, 397.665
Focal Length : 636.579, 636.579
Distortion Model : Brown Conrady
Distortion Coefficients : [0,0,0,0,0]
Show stream intrinsics again?[y/n]: ^C
参考文献
https://zhaoxuhui.top/blog/2020/09/09/intel-realsense-d435i-installation-and-use.html
版权声明:本文为qq_38364548原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。