关于SNIP NTRIP Caster学习过程中自己不懂的知识点扫盲:
NTRIP Caster
什么是NTRIP Caster NTRIP Caster Setup | Lefebure
Ntrip(Networked Transport of RTCM via Internet Protocol) 全称基于互联网的 RTCM 网络传输协议, 运行流程如下:
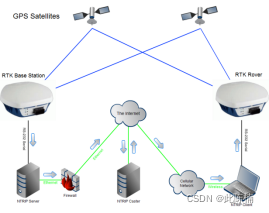
有四个主要组成部分:
- Client
- Caster, 拙译为汇总端,处理中心,或者转发服务器
- Server
- Source
服务端读取源端设备数据, 发送至汇总端, 客户端连接汇总端获取差分数据, 用于校正.
汇总端可将多个服务端数据汇总为一个虚拟基站, 也可以不汇。.
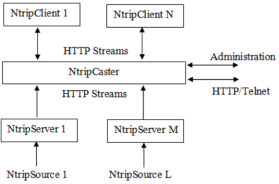
NtripSource用来产生GNSS差分数据,并把差分数据提交给NtripServer
NtripServer负责把GNSS差分数据提交给NtripCaster
NtripCaster差分数据中心,负责接收、发送GNSS差分数据
NtripClient登录NtripCaster后,NtripCaster把GNSS差分数据发送给它
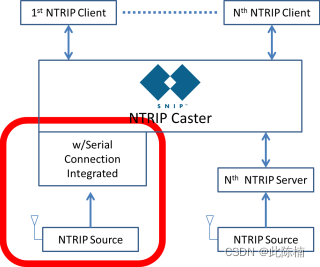
NtripSource和NtripServer一般已经集成到一台GNSS基准站内,GNSS基准站产生差分数据(扮演着NtripSource的角色),然后再通过网络发送给NtripCaster(扮演着NtripServer的角色)
NtripSource和NtripServer也可以分开:GNSS基准站产生差分数据,然后通过串口发送给一个程序(比如strsvr),这个程序再把差分数据发送给NtripCaster。这里GNSS基准站扮演着NtripSource的角色,程序扮演着NtripServer的角色。
NtripCaster一般就是一台固定IP地址的服务器,它负责接收、发送差分数据。给NtripClient发送差分数据时有两种方案:
一是直接转发NtripSource产生的差分数据,NtripClient只要指定挂载点即可;Mountpoint是挂载点名称,NtripServer可能有多个,挂载点用来区分它们。
二是通过解算多个NtripSource的差分数据,为NtripClient产生一个虚拟的基准站(即VRS)。
在这种情况下,NtripClient不仅要指定挂载点,还要发送自身的坐标给NtripCaster,NtripCaster根据这个坐标才能产生虚拟基准站。NtripClient给NtripCaster发送自身坐标,用到的就是NMEA里的GGA数据。是否需要给NtripCaster发送GGA数据,有一个指标参数,0表示不需要,1表示需要。
NtripClient一般就是GNSS流动站。登录NtripCaster后,发送自身的坐标给NtripCaster。NtripCaster选择或产生差分数据,然后发送给NtripClient。这样GNSS流动站即可实现高精度的差分定位。 来源:中国地质大学陈超教授
NTRIP Server
有几个免费工具可以提供这项服务,RTKLIB 就是其中之一。您可以使用它的 STRSVR 工具从串行端口收集数据,然后将其发送到 NTRIP Caster
RTCM:差分
RTCM SC104标准是由国际海运事业无线电技术委员会(Radio Technical Commission for Maritime services)于1983年11月提出的GNSS差分信号格式。
RTCM有专门委员会指定标准形式的文件。
RTK(Real Time Kinematic):实时动态载波相位差分技术
1原理
RTK 通过已知确定位置的基站校准流动站位置.计算的是两个测站的载波相位观测值。即,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
2组成
RTK需要:基站+流动站+中间通讯手段
传统的中间通讯手段采用向周围发射关于基站信息的无线电波, 但一般只能覆盖几公里, 且有违法之虞, 又 RTK 基站的理论有效覆盖范围可达 30 公里, 因此有组织提出了 Ntrip 协议。
互联网下RTK优势
DGPS”的传统用途是用于水路和沿海导航,只需校正到一米或两米即可。这些数据是通过低频高功率发射器网络发送的,尽管该任务仍然存在,但 RTK 可实现的性能(即使使用低成本的仅 L1/B1设备)现在远远超过它。成本、效率和精确度完胜。
关于GNSS定位误差 NTRIP 配置及部分基础知识扫盲 - 知乎
GNSS(global navigation satellite system) 全称全球导航卫星系统.
GPS(Global Positioning System)全称全球定位系统, 是GNSS的一种实现.
目前世界的定位系统有:
- 美国 GPS
- 中国 BDS (北斗)
- 俄罗斯 GLONASS
- 欧盟 Galileo (伽利略, 尚在建造)
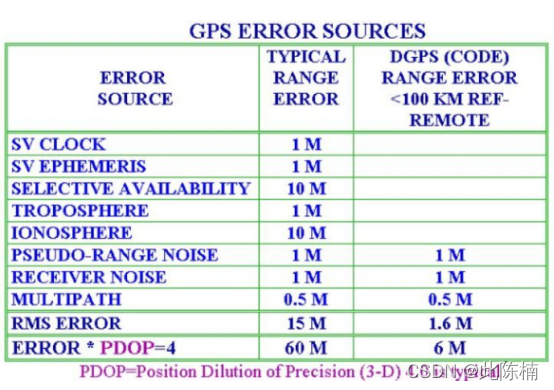
GNSS不间断向大地发送信号, 一般仅需要一个接收器即可使用, 定位误差一般有:
- 轨道误差
- 时钟误差
- 电离层延迟
- 对流层延迟
- 多径误差
- 接收机噪音
误差主要来自电离层
GPS状态解释:
“解状态” | 包括单点解、伪距解、浮点解、固定解。 |
单点解 | 表示未收到差分数据,精度最低,一般为 10 米以内; |
伪距解 | 表示接收到基准站差分,经过伪距解算得到的解,或接收 SBAS 信号得到的解状态,精度较低,一般为 3 米以内; |
浮点解 | 表示接收到基准站差分,经载波相位差分数据解算得到的初步解,精度较高,一般在 0.5 米以内; |
固定解 | 表示接收到基准站差分,经载波相位差分数据解算得到的最终解,精度较最高,一般在 0.02 米以内,进行高精度 GPS 测量时,需要达到固定解状态才能记录数据; |
“差分模式” | 包括 CMR、RTCM2.X、RTCM3 等; |
CMR | 天宝定义的差分电文格式; |
RTCM | 通用的差分传输电文格式,包括 RTCM2.X、RTCM3 等; |
“差分延迟” | 差分延迟表示移动站接收到上一组差分的时间间隔,单位为秒,RTK 进行工作时,差分延迟越小越好,一般要求小于 10 秒,最好为 1 秒、2 秒; |
DOP 值 | 包括 PDOP、HDOP、VDOP; |
PDOP | 卫星空间几何分布强度因子,小于 3 为比较理想状态,PDOP 值越小表示卫星空间位置分布强度越好,越有利于快速解算到固定解状态,HDOP 水平几何分布强度因子、VDOP 垂直几何分布强度因子,分别表示 PDOP 在水平和垂直方向上的分量。 |
预想:
自行购买服务器搭建Ntrip Caster的实现
一般就是一台固定IP地址的服务器,它负责接收、发送差分数据
搭建简易的基于NTRIP协议的CORS系统 搭建简易的基于NTRIP协议的CORS系统 - 简书
linux ntrip caster配置说明书
关于华为云服务器
关于cors