机器人坐标变换
位姿与点的描述
一个在空间中运动的物体,在选定的坐标系下,可以通过一个向量描述其位置,而物体的姿态需要一个自身的坐标系来描述。所以需要知道物体的姿态,就需要在确定物体自身坐标系后,找到自身坐标系与世界坐标系之间的关系。为什么需要知道两者之间的关系呢?因为在一个机器人中,有若干个运动结构,需要知道各个运动结构之间的关系,才可以明确操控机器人的运动,世界坐标系就是联通各个子坐标系的桥梁。
子坐标系下点在世界坐标系下的描述
1.子坐标系B相对于世界坐标系A只有平移
子坐标系B相对与世界坐标系A只有位置的变化,没有姿态的变化,在B坐标系中的点P的位置可以通过下式变换为在坐标系A下的描述:
P点在图中的表示:

的各个分量可以通过下式来表示:
2.子坐标系B相对于世界坐标系A只有旋转
在求解子坐标系B相对于世界坐标系A有旋转时,需要用到旋转矩阵,旋转矩阵就是一个3*3的矩阵,其具有一下性质:
1.各列的都是单位向量
2.每列单位向量正交
以上两点性质可以说明旋转矩阵只有三个自由度,B相对于A的旋转矩阵等于A相对于B的旋转矩阵,即:
也可以表示为:
如图:
在子坐标B中有P,需要将P表示在世界坐标系A中,
3.一般情况下的坐标变换
如图:
一般情况下的坐标系其实是以上两种变换的组合,首先将引入中间坐标系A`,使其姿态与A相同,而原点与B重合,先求出B相对于A‘的旋转矩阵R,然后求出A与A’的平移,就以可以算出P在A坐标系下的位置,算法如下: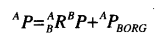
为方便,引入T矩阵,T是4*4矩阵,可以计算: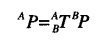
展开式为: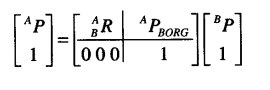
%%本文来源机器人学导论第三版
版权声明:本文为qq_40007147原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。