##PreScan 使用点云雷达代替激光雷达操作步骤:
1、 建立场景(包括车、路、周围环境)
2、 添加点云传感器
3、 点云传感器设置
3.1调节传感器安装位置,Heading=0,传感器扫描方向为车辆正前方;
3.2 调节传感器横向扫描范围、垂向扫描范围(垂向扫描范围可以根据实际激光雷达的垂向两条激光的夹角来设置)、输出结果(图中所示是为了显示点云图,如果不想现实点晕图可以通过修改输出模式,就可以得到输出的距离,或者是用6个点云传感器即可以得到点云图,也可以得到距离);
3.3 使用3个点云传感器,修改其他两个角度分别为120、240,其他参数与第一个点云传感器一致即可;(三个heading分别为0,120,240)三个传感器添加好以后的效果如图2所示。

图1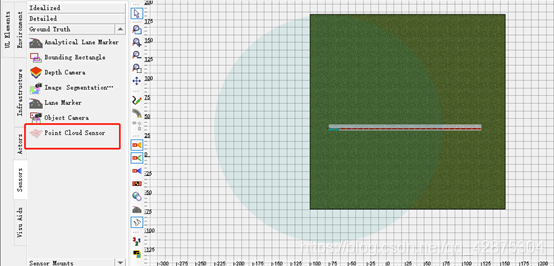
图2
4、 编译结果如图3所示: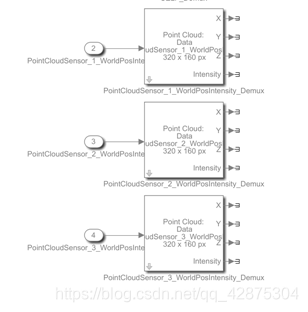
图3
5、 打开Useful Blocks,找到图4中的两个模块,根据输出的数据任选一个,如果没有输出点云图就可以不用选;
图4
6、 把三个点云传感器相同的因素用一个信号串联模块(Matrix Concatenate)输入到出图模块,如图5所示
图5
7、 点击运行,就可以看到点云图: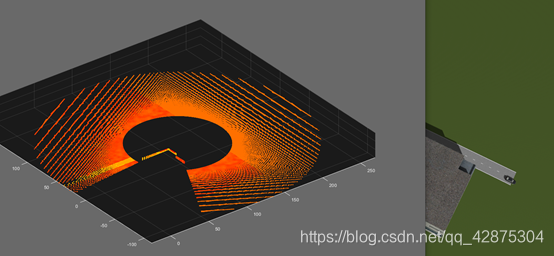
版权声明:本文为qq_42875304原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。