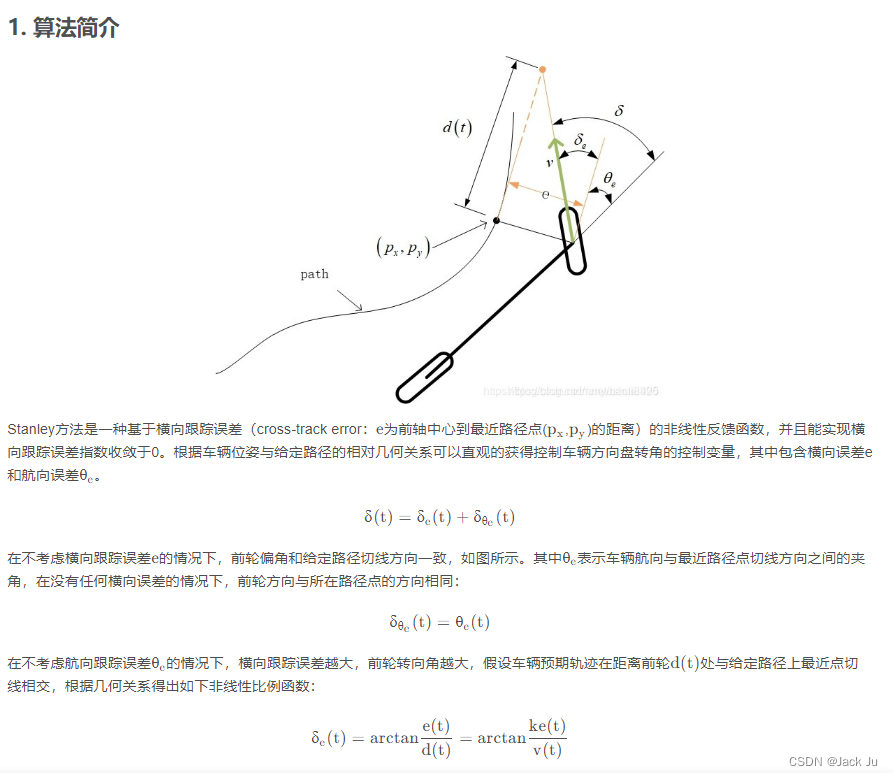
 很长一段时间,在思考PID控制时,转角环的目标方向盘转角的理论基础,在工程实现时,目标转角计算分为远端和近端和前馈计算所得的转角,如上,Stanley算法使用与目标轨迹的横向距离误差以及航向角误差、纵向距离共同计算目标方向盘转角,使用x = a0+a1y+a2y^2+a3y ^3,y是纵向距离,x是横向距离。
很长一段时间,在思考PID控制时,转角环的目标方向盘转角的理论基础,在工程实现时,目标转角计算分为远端和近端和前馈计算所得的转角,如上,Stanley算法使用与目标轨迹的横向距离误差以及航向角误差、纵向距离共同计算目标方向盘转角,使用x = a0+a1y+a2y^2+a3y ^3,y是纵向距离,x是横向距离。
版权声明:本文为qq_40464599原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
很长一段时间,在思考PID控制时,转角环的目标方向盘转角的理论基础,在工程实现时,目标转角计算分为远端和近端和前馈计算所得的转角,如上,Stanley算法使用与目标轨迹的横向距离误差以及航向角误差、纵向距离共同计算目标方向盘转角,使用x = a0+a1y+a2y^2+a3y ^3,y是纵向距离,x是横向距离。