原文:2.1.4 话题通信自定义msg · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
-----------------------------------------------------------------分割线
1.在功能包下创建文件并编写
string name
uint16 age
float64 height

2.在功能包中的 package.xml 文件中添加编译依赖与执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
<!-- exce_depend 以前对应的是 run_depend 现在非法 -->

3.在功能包中的 CMakeLists.txt 中编辑相关配置
3.1.在 find_package 中添加编译依赖
message_generation
# 加入 message_generation,必须得有 std_msgs 
3.2. 在 add_message_files 中添加自定义的msg文件名

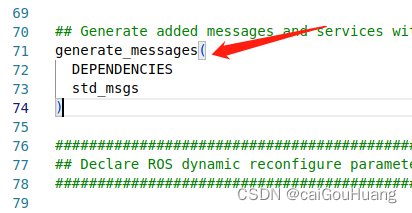
3.3.解除 generate_messages 的注释(不需要做修改)
3.4.在 catkin_package 处添加执行的依赖
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime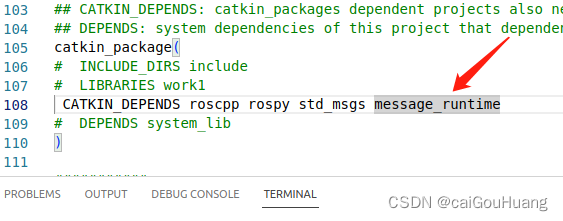
版权声明:本文为Akali_L原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。