最近发现一个比较好用的多点导航程序,分享出来。。。
先看一下仿真的效果。。。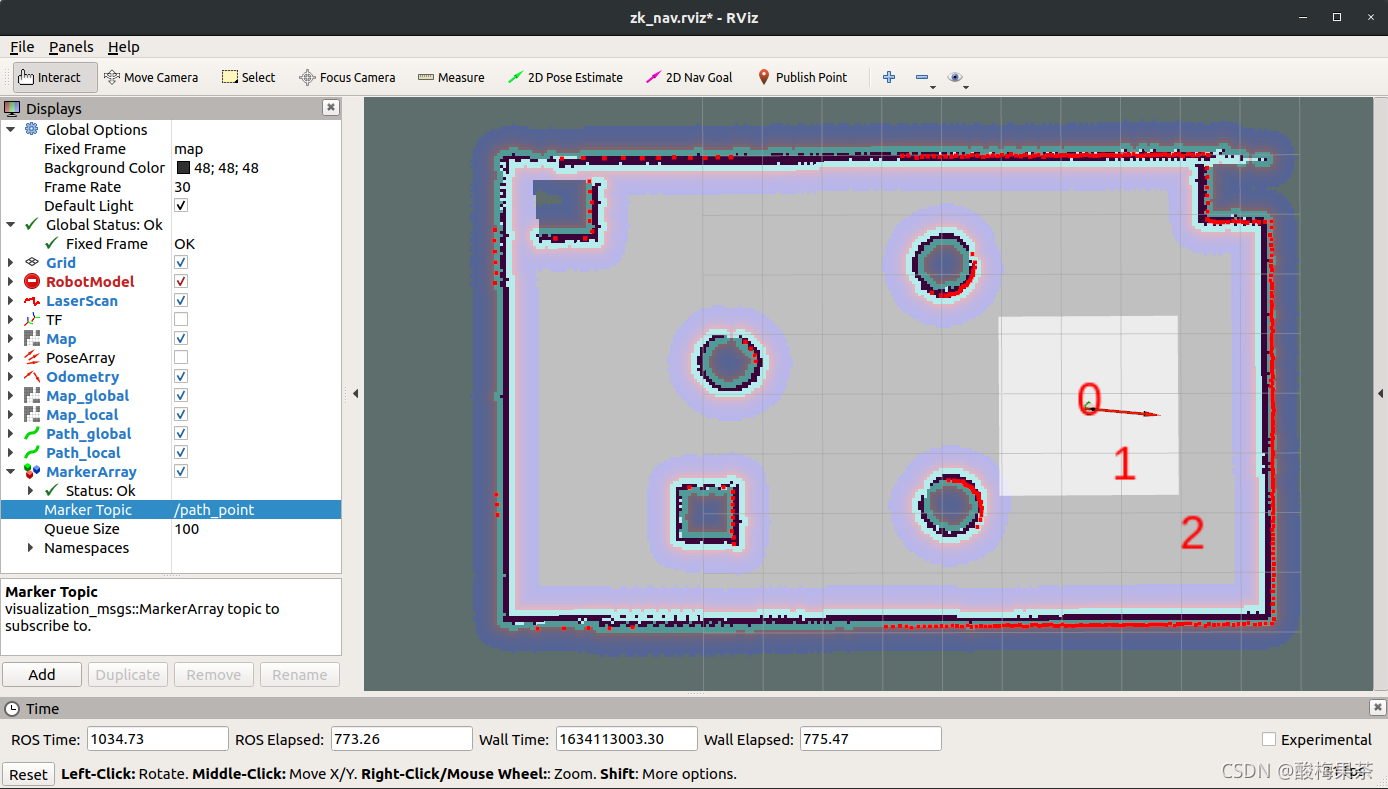
再上源码。。。
show_mark.py
#!/usr/bin/env python
# encoding: utf-8
from visualization_msgs.msg import Marker
from visualization_msgs.msg import MarkerArray
import rospy
import math
from geometry_msgs.msg import PointStamped, PoseStamped
import actionlib
from move_base_msgs.msg import *
def status_callback(msg):
global try_again, index, add_more_point
if msg.status.status == 3:
try_again = 1
if add_more_point == 0:
print 'Goal reached'
if index < count:
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.w = 1
goal_pub.publish(pose)
index += 1
elif index == count:
print 'finish all point'
index = 0
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.w = 1
goal_pub.publish(pose)
add_more_point = 1
else:
print 'Goal cannot reached has some error : ', msg.status.status, 'try again!!!'
if try_again == 1:
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index -
1].pose.position.x
pose.pose.position.y = markerArray.markers[index -
1].pose.position.y
pose.pose.orientation.w = 1
goal_pub.publish(pose)
try_again = 0
elif index < len(markerArray.markers):
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = markerArray.markers[index].pose.position.x
pose.pose.position.y = markerArray.markers[index].pose.position.y
pose.pose.orientation.w = 1
goal_pub.publish(pose)
index += 1
def click_callback(msg):
global index, add_more_point, count
marker = Marker()
marker.header.frame_id = 'map'
marker.type = marker.TEXT_VIEW_FACING
marker.action = marker.ADD
marker.scale.x = 1
marker.scale.y = 1
marker.scale.z = 1
marker.color.a = 1
marker.color.r = 1
marker.color.g = 0
marker.color.b = 0
marker.pose.orientation.w = 1
marker.pose.position.x = msg.point.x
marker.pose.position.y = msg.point.y
marker.pose.position.z = msg.point.z
marker.text = str(count)
markerArray.markers.append(marker)
id = 0
for m in markerArray.markers:
m.id = id
id += 1
mark_pub.publish(markerArray)
if count == 0:
pose = PoseStamped()
pose.header.frame_id = 'map'
pose.header.stamp = rospy.Time.now()
pose.pose.position.x = msg.point.x
pose.pose.position.y = msg.point.y
pose.pose.orientation.w = 1
goal_pub.publish(pose)
index += 1
if add_more_point and count > 0:
add_more_point = 0
move = MoveBaseActionResult()
move.status.status = 3
move.header.stamp = rospy.Time.now()
goal_status_pub.publish(move)
count += 1
print 'add a path goal point'
def Show_mark():
global markerArray, count, index, add_more_point, try_again, mark_pub, goal_pub, goal_status_sub, goal_status_pub
markerArray = MarkerArray()
count = 0
index = 0
add_more_point = 0
try_again = 1
rospy.init_node('path_point_demo')
mark_pub = rospy.Publisher('/path_point', MarkerArray, queue_size=100)
click_sub = rospy.Subscriber(
'/clicked_point', PointStamped, click_callback)
goal_pub = rospy.Publisher(
'/move_base_simple/goal', PoseStamped, queue_size=1)
goal_status_sub = rospy.Subscriber(
'/move_base/result', MoveBaseActionResult, status_callback)
goal_status_pub = rospy.Publisher(
'move_base/result', MoveBaseActionResult, queue_size=1)
rospy.spin()
if __name__ == '__main__':
Show_mark()
使用方法。。。
- 新建功能包
- 创建script存放python文件
- 创建show_mark.py文件
- 设置成可执行文件
- 复制代码show_mark.py源码
- 启动机器人模型
- 启动导航算法
- 打开Rviz
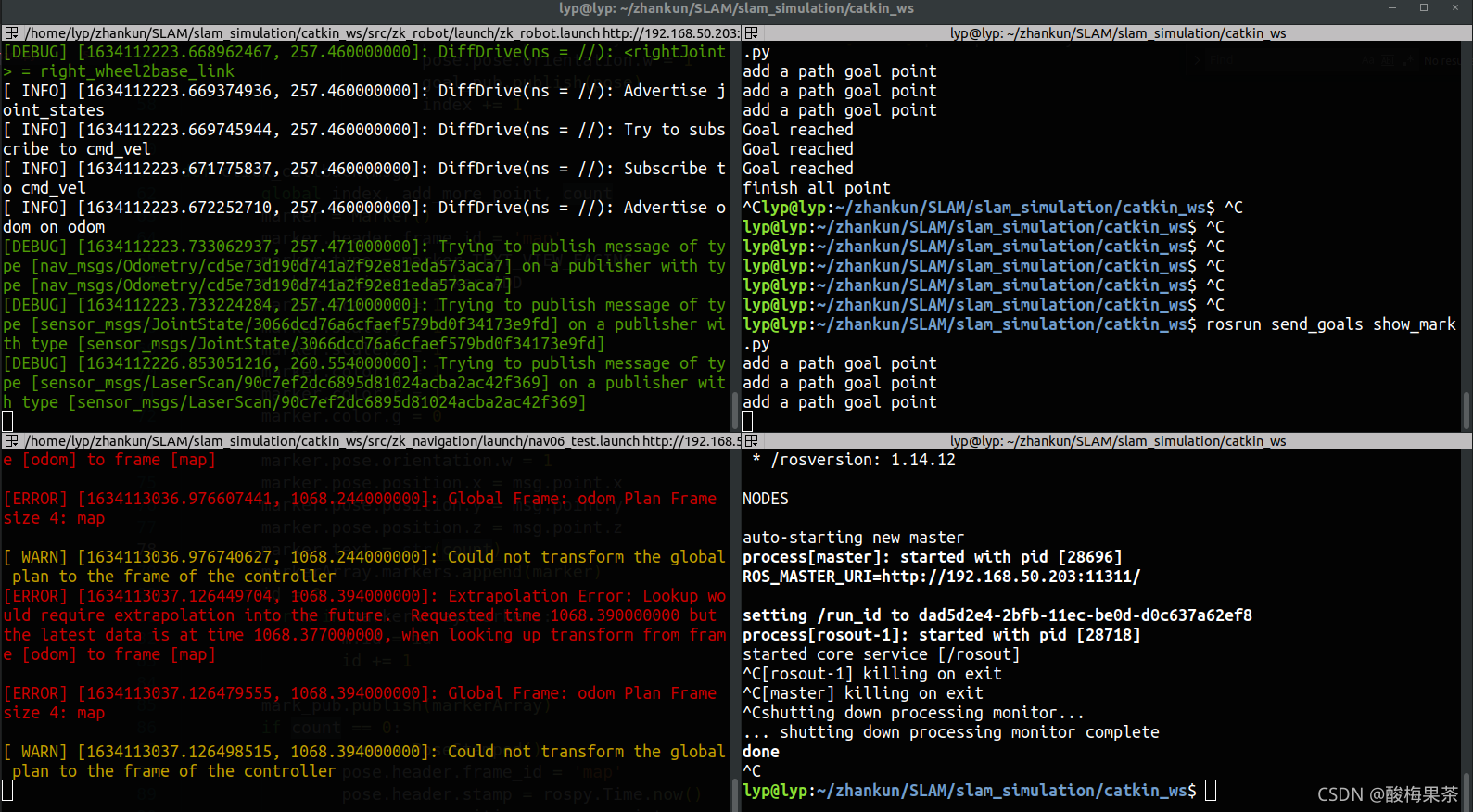
- 启动多点导航任务
rosrun 功能包名 show_mark.py - Rviz添加 MarkerArray,订阅/path_point话题
- 点击Rviz中的Publish Point,设置导航点
- 完成多点循环导航任务
版权声明:本文为qq_41821678原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。