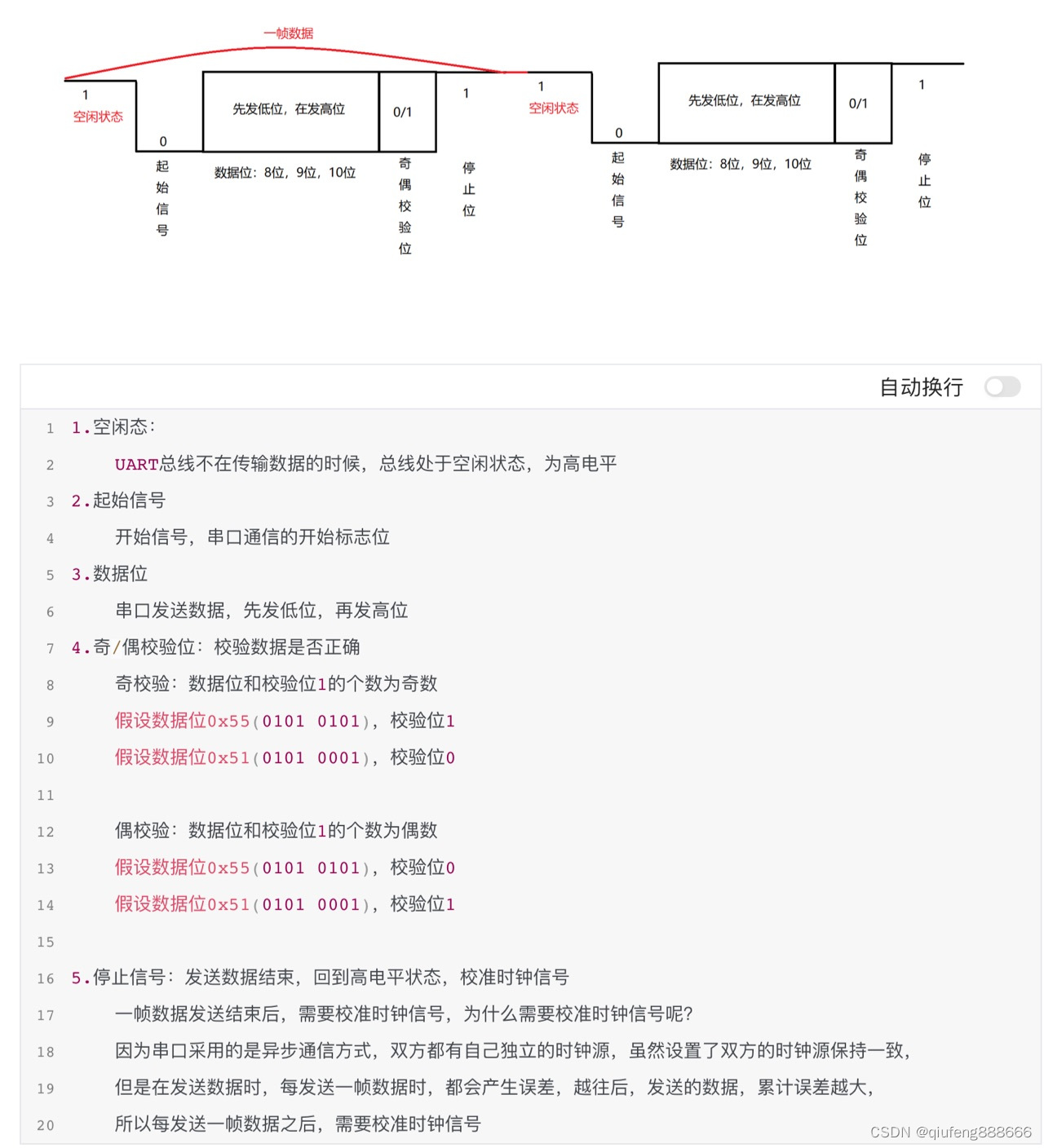
串口uart协议图
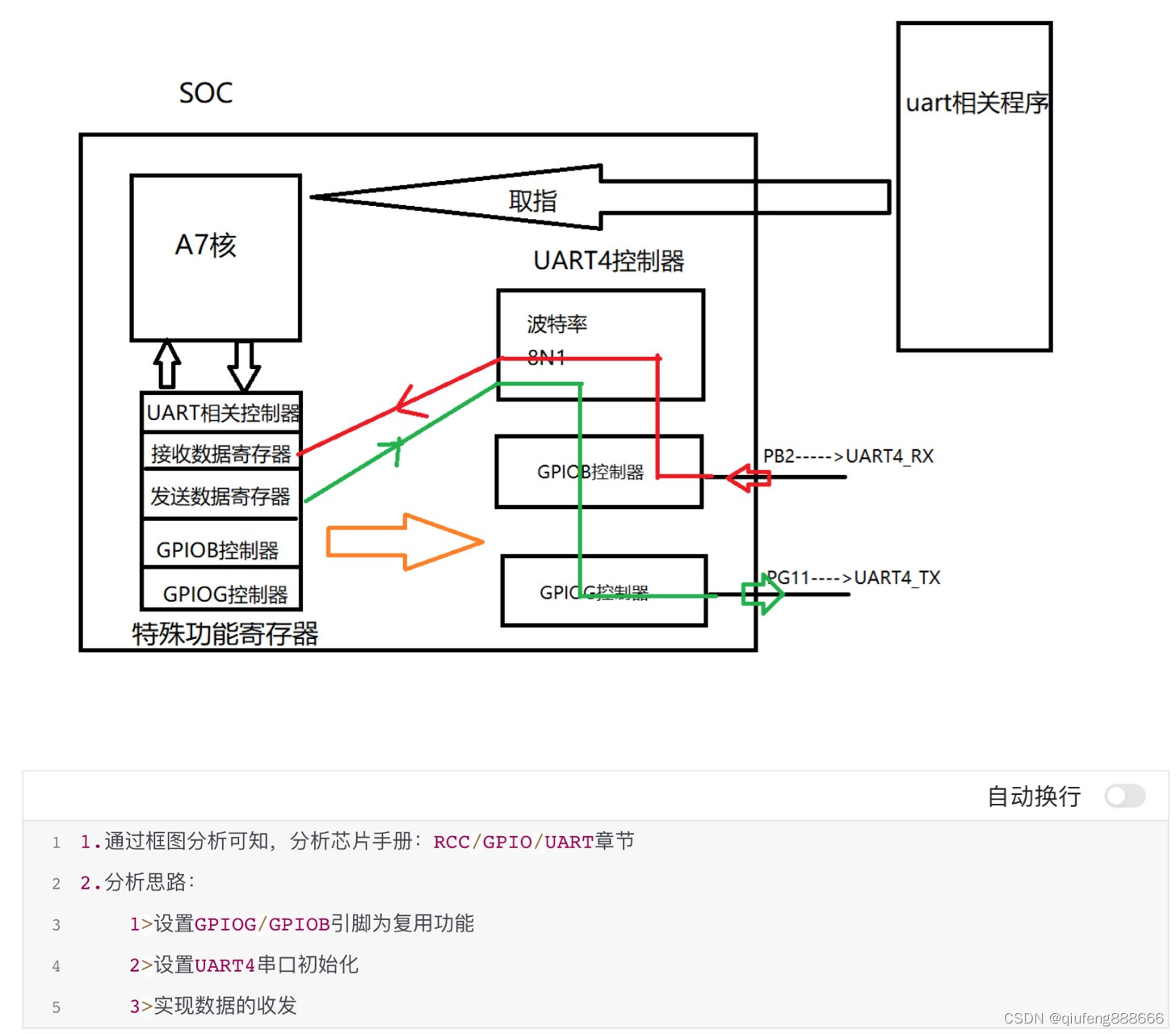
结构框图
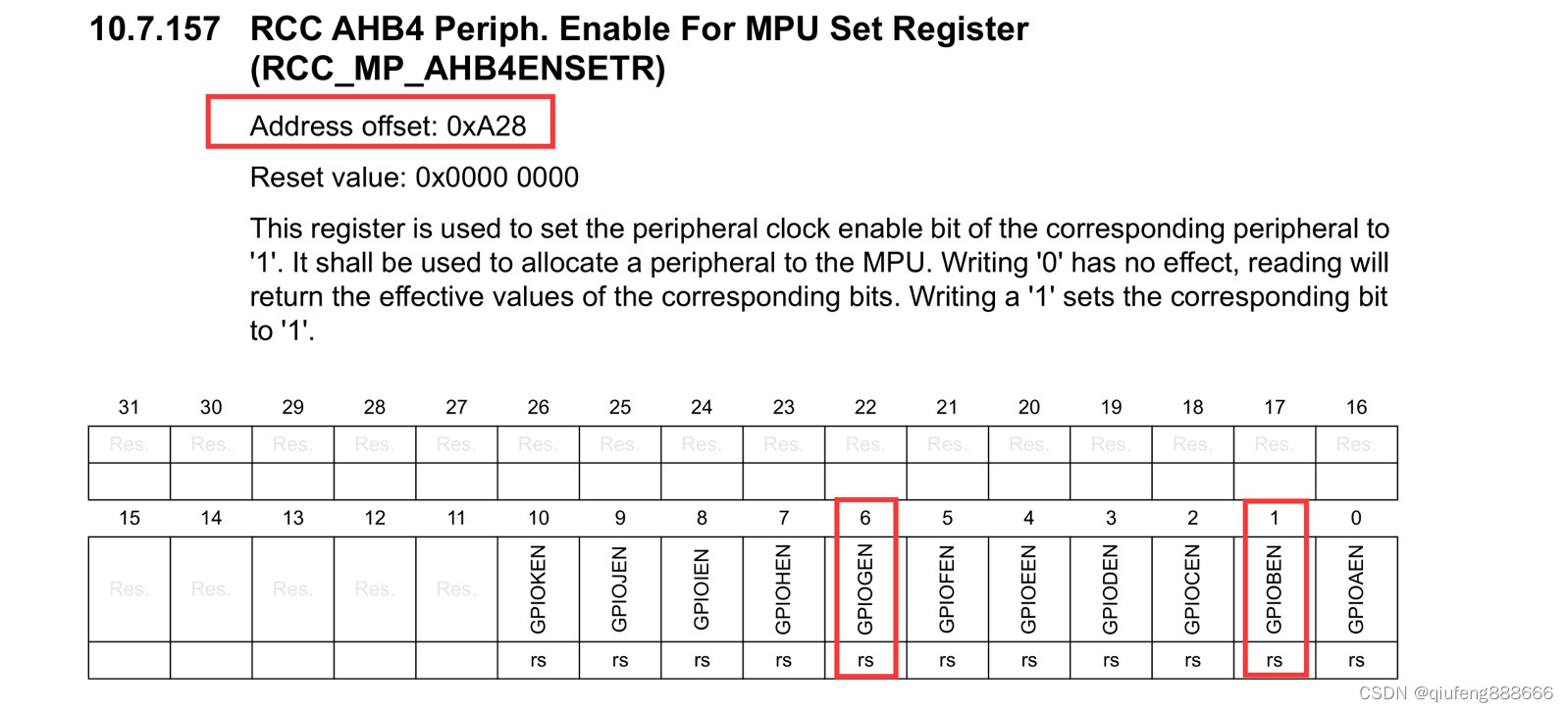
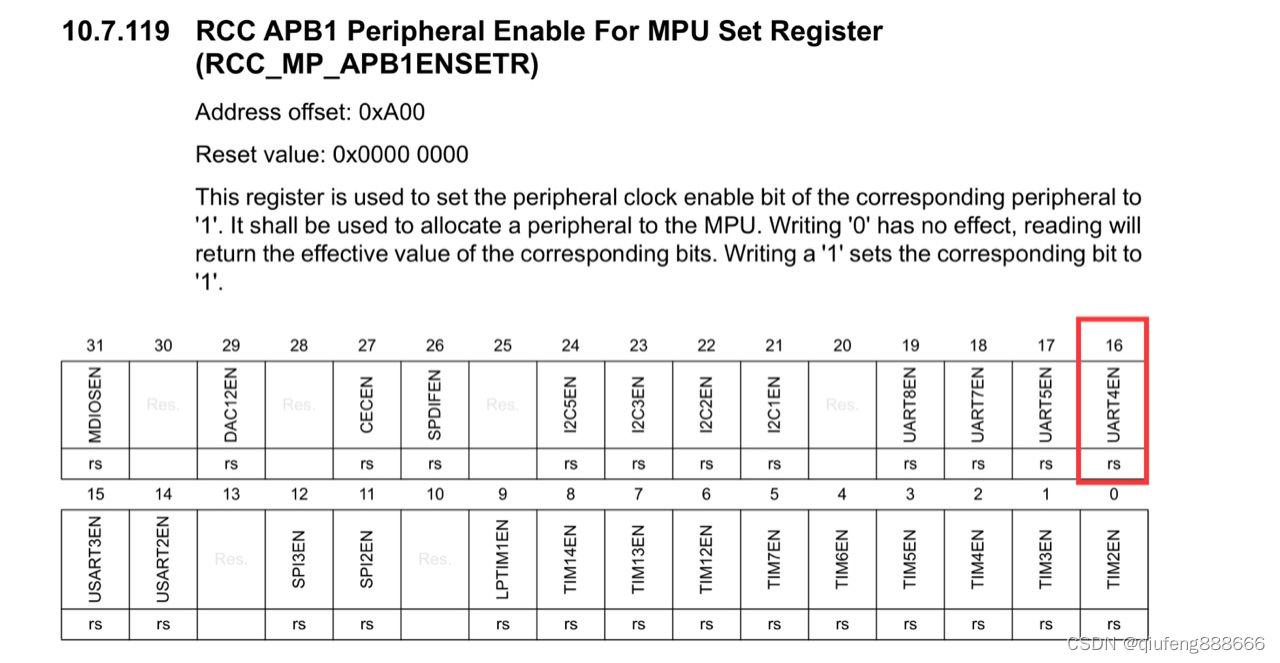
RCC分析
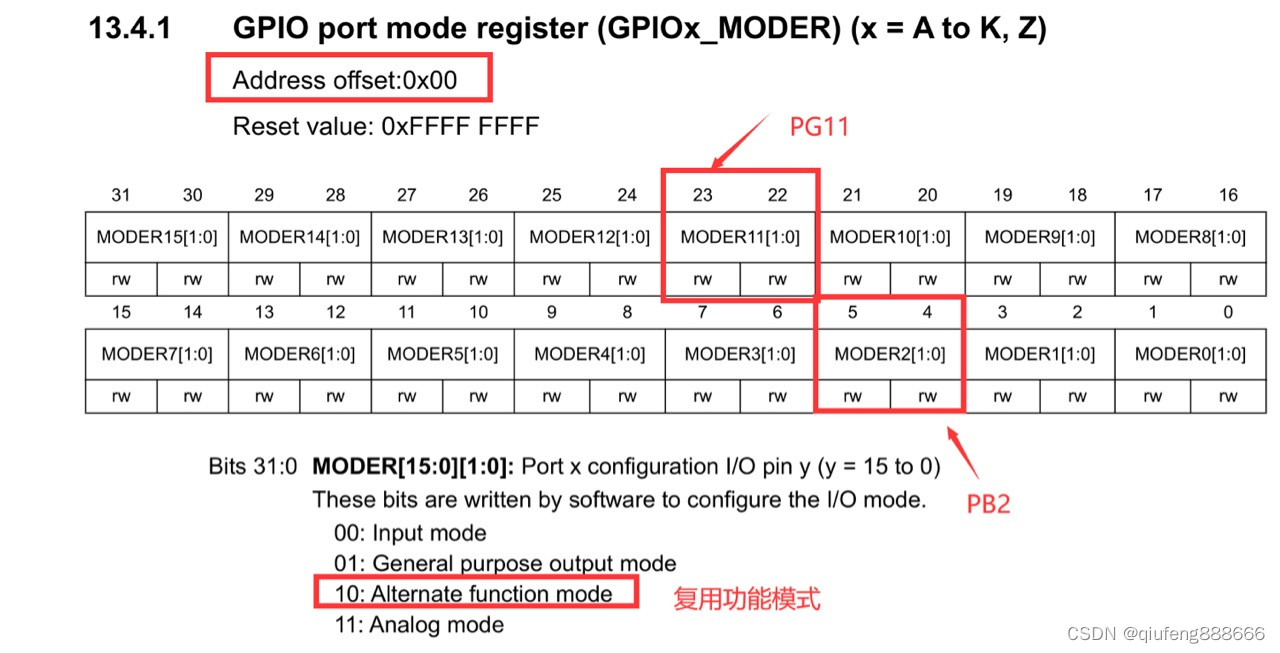
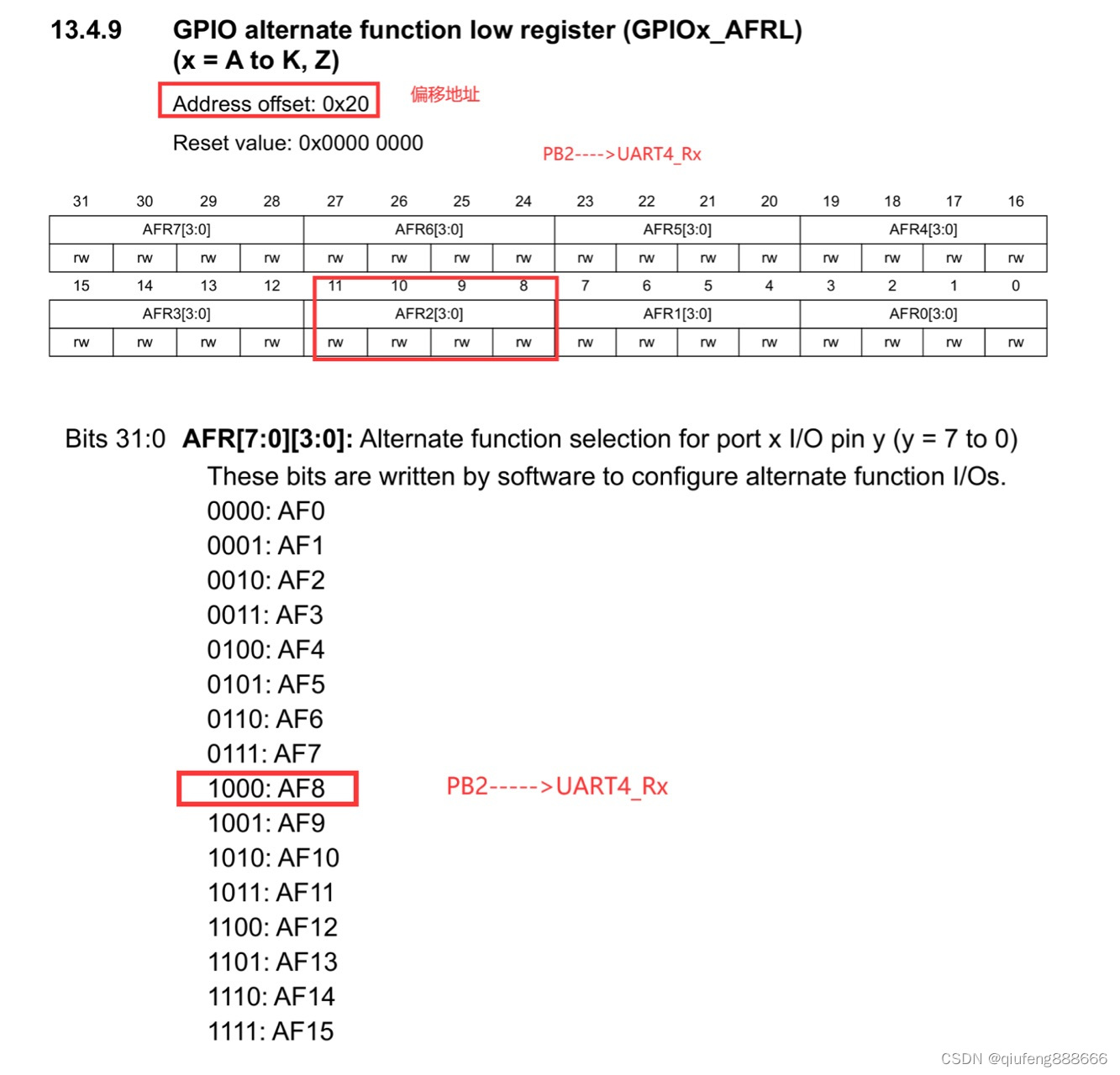
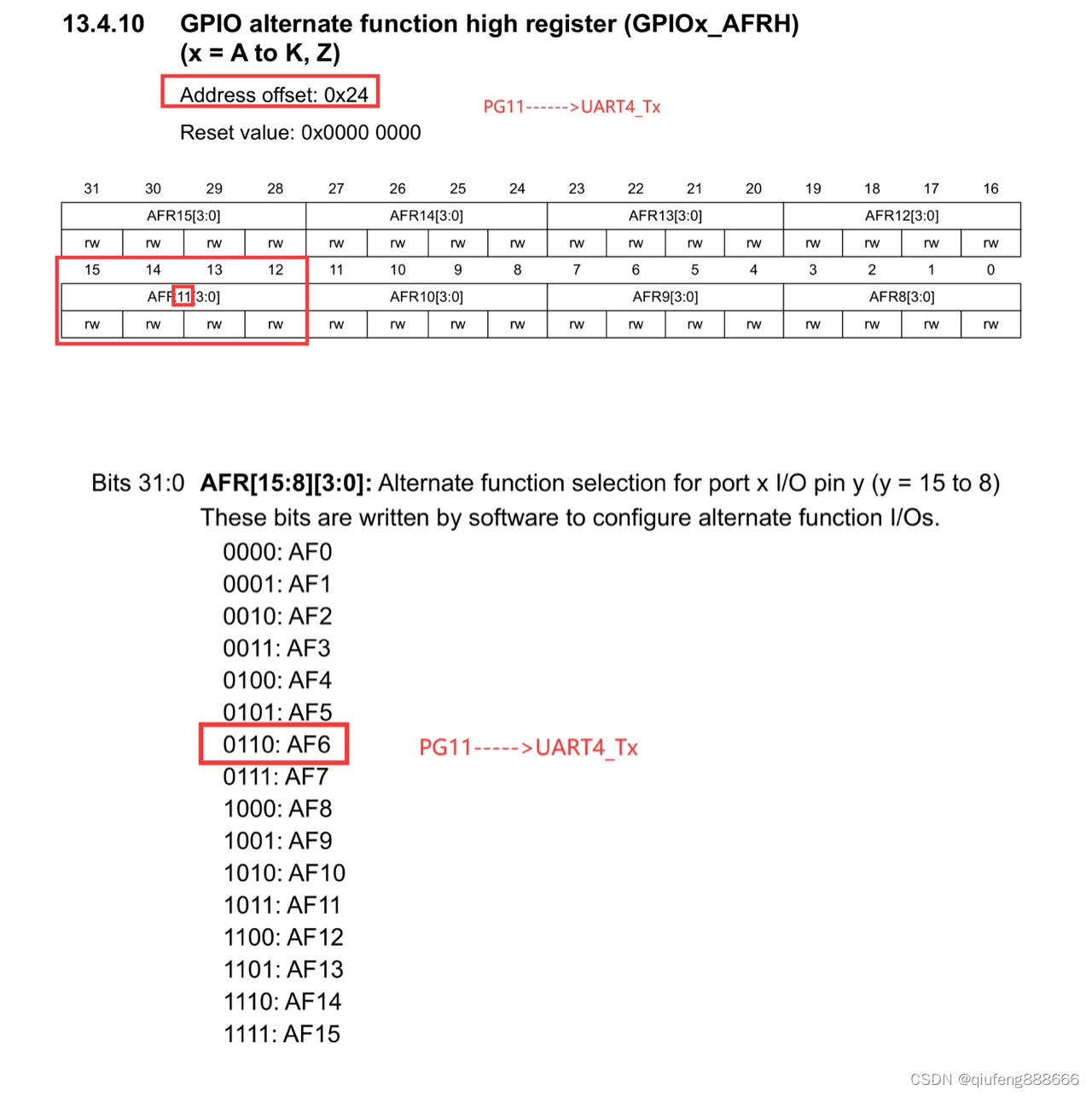
GPIO分析
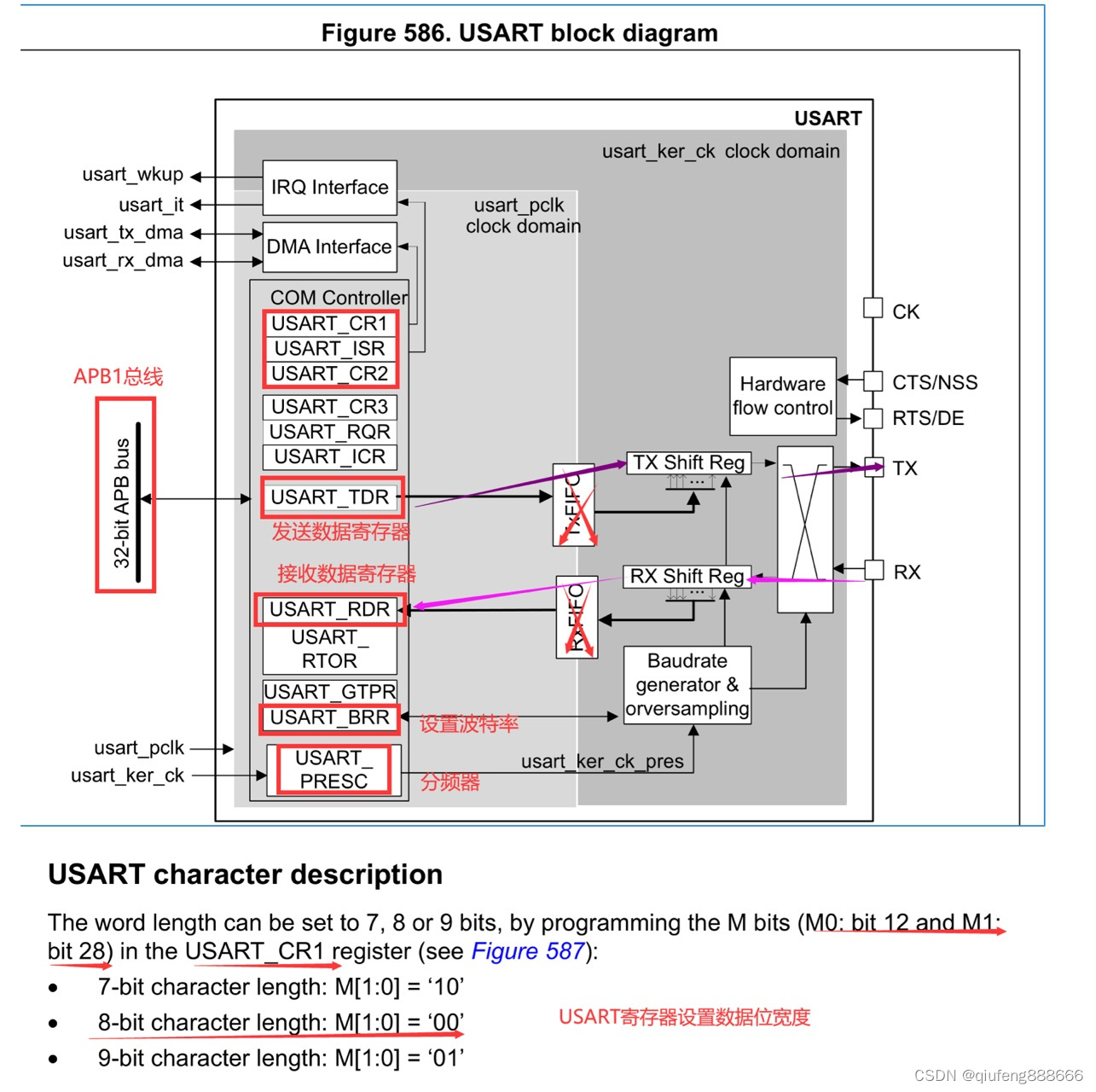
UART框图分析
主要代码
//1.初始化函数
void uart4_init()
{
/*******RCC章节初始化******/
RCC->MP_AHB4ENSETR |= (0x1 << 1);
RCC->MP_AHB4ENSETR |= (0x1 << 6);
RCC->MP_APB1ENSETR |= (0x1 << 16);
/*******GPIO章节初始化******/
GPIOB->MODER &= (~(0x3 << 4));
GPIOB->MODER |= (0x1 << 5);
GPIOB->AFRL &= (~(0xf << 8));
GPIOB->AFRL |= (0x8 << 8);
GPIOG->MODER &= (~(0x3 << 22));
GPIOG->MODER |= (0x2 << 22);
GPIOG->AFRH &= (~(0xf << 12));
GPIOG->AFRH |= (0x6 << 12);
/*******UART章节初始化*******/
if(USART4->CR1 & (0x1 << 0))
{
//将UE设置为禁止
USART4->CR1 &= (~(0x1 << 0));
}
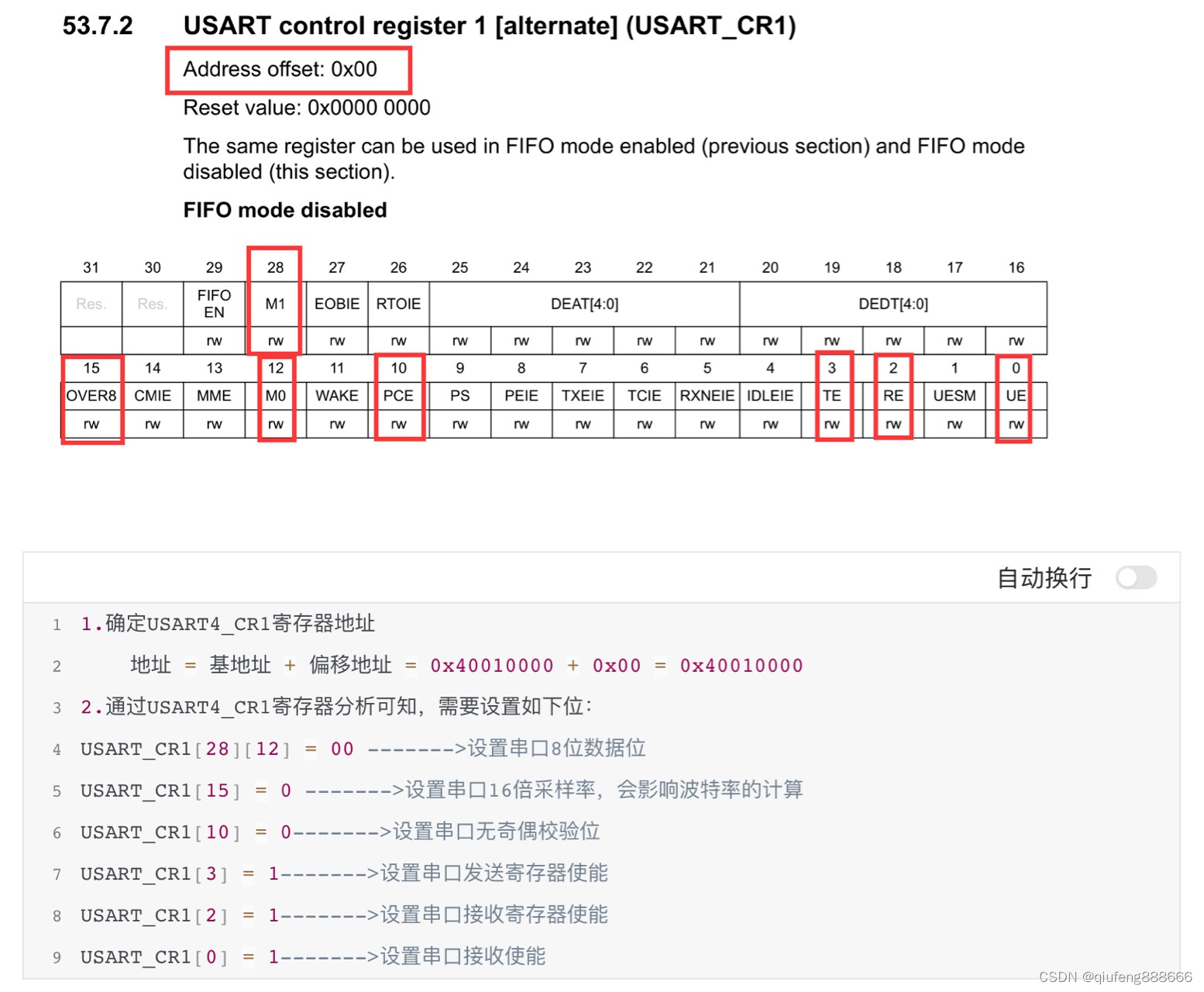
//1.串口初始化 8位数据位
USART4->CR1 &= (~(0x1 << 12));
USART4->CR1 &= (~(0x1 << 28));
//设置无校验
USART4->CR1 &= (~(0x1 << 10));
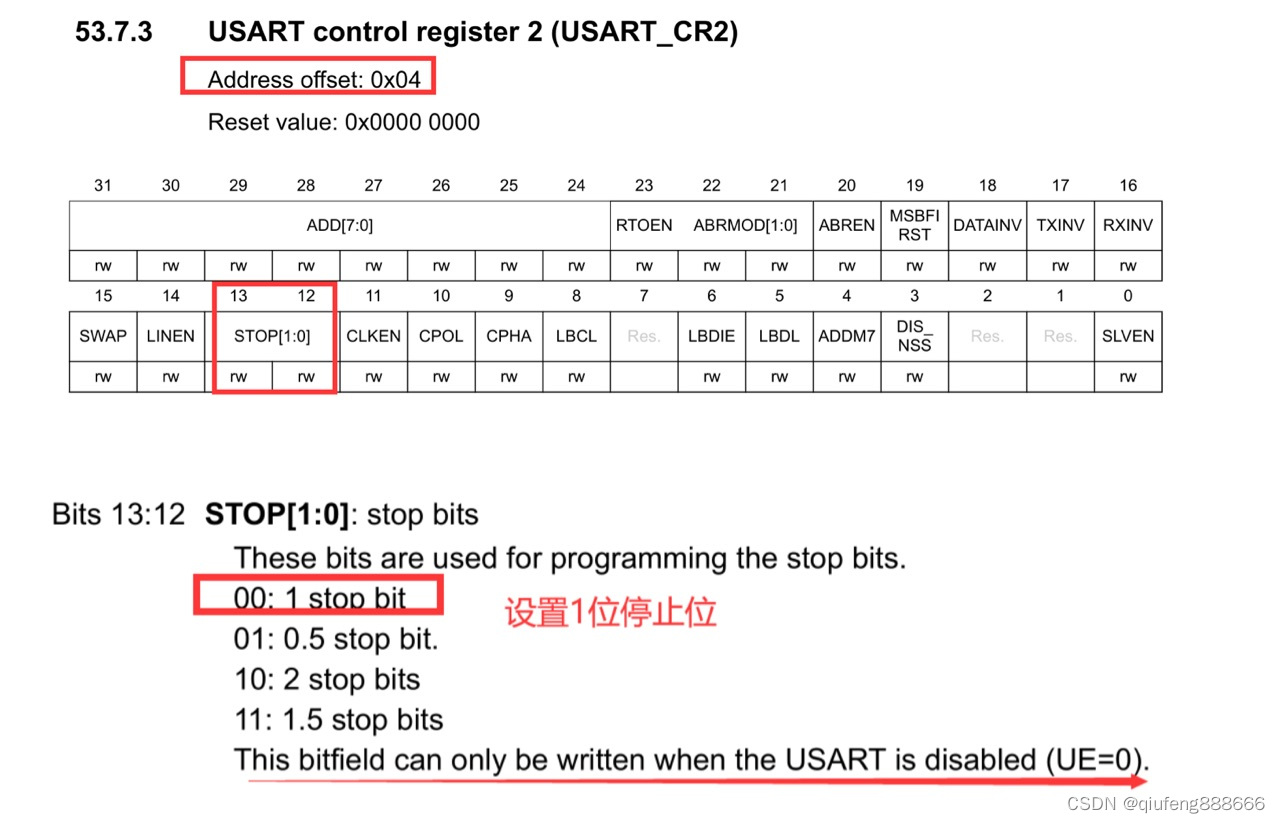
//设置串口1位停止位
USART4->CR2 &= (~(0x3 << 12));
//设置16倍采样率
USART4->CR1 &= (~(0x1 << 15));
//设置串口不分频
USART4->PRESC &= (~(0xf << 0));
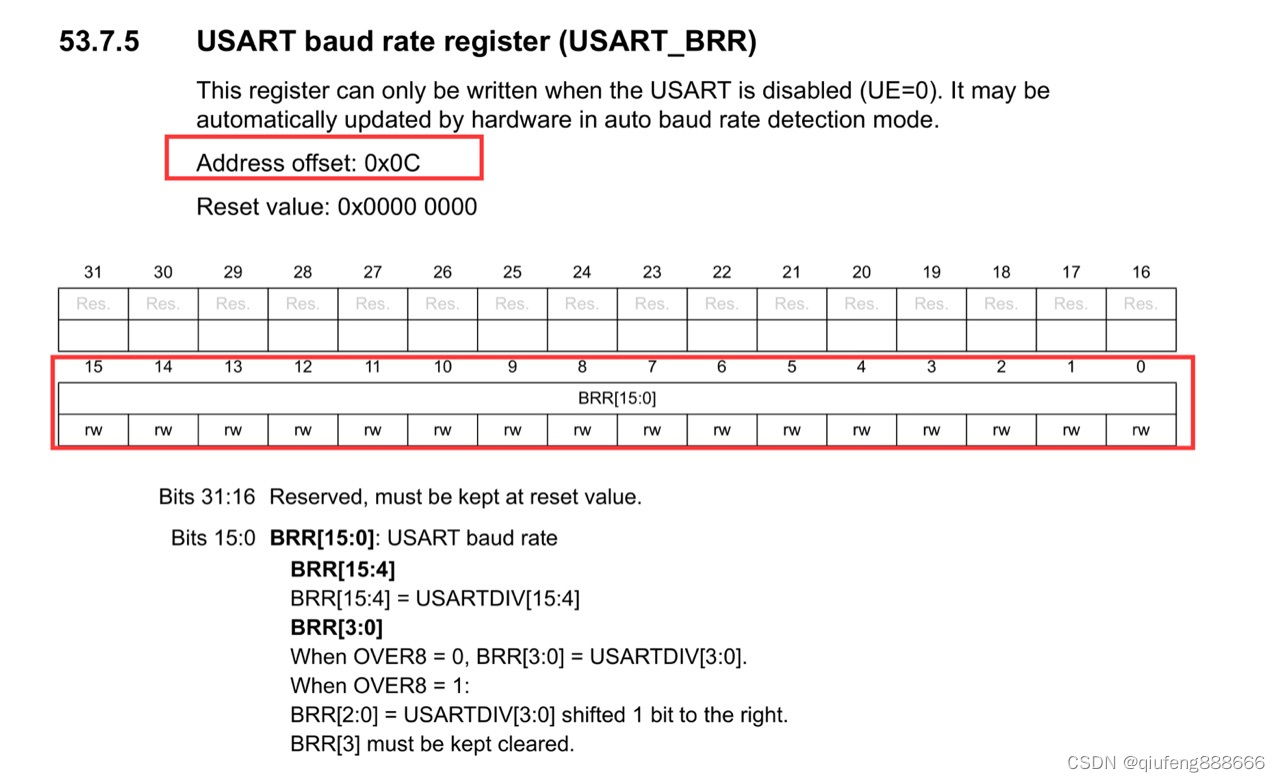
//设置串口波特率115200
USART4->BRR = 0x22B;
//设置串口发送器使能
USART4->CR1 |= (0x1 << 3);
//设置串口接收器使能
USART4->CR1 |= (0x1 << 2);
//设置串口接收使能
USART4->CR1 |= (0x1 << 0);
}
//2.发送一个字符
void put_char(const char str)
{
//1.判断发送数据寄存器是否有数据 ISR[7]
//读0:发送数据寄存器满,需要等待
//读1:发送数据寄存器为空,才可以发送下一个字节数据
while(!(USART4->ISR & (0x1 << 7)));
//2.将要发送的字符,写入到发送数据寄存器中
USART4->TDR &= (~(0xff));
USART4->TDR = str;
//3.判断发送数据是否发送完成
//读0:发送数据没有完成,需要等待
//读1:发送数据完成,可以发送下一帧数据
while(!(USART4->ISR & (0x1 << 6)));
}
//3.接收一个字符
char get_char()
{
char ch;
//1.判断接收寄存器是否有数据可读 ISR[5]
//读0:没有数据可读,需要等待
//读1:有数据可读
while(!(USART4->ISR & (0x1 << 5)));
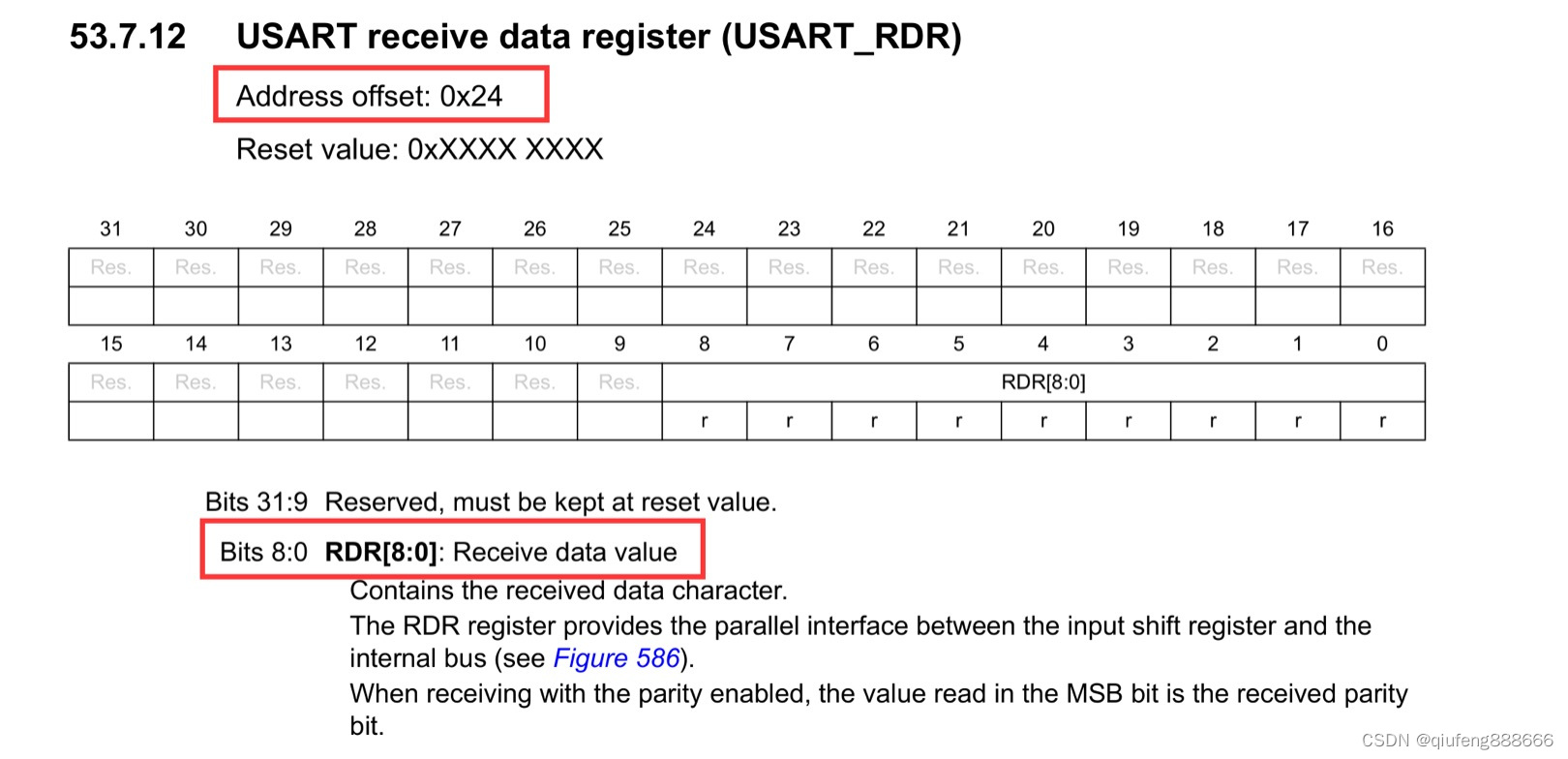
//2.将接收数据寄存器中的内容读出来
ch = (char)(USART4->RDR);
return ch;
}
//发送一个字符串
void put_string(const char* str)
{
int i=0;
//判断是否为'\0'
while(*(str+i) != '\0')
{
//一个一个字符的发送
while(!(USART4->ISR & (0x1 << 7)));
USART4->TDR = *(str+i);
while(!(USART4->ISR & (0x1 << 6)));
i++;
}
}
char buffer[50] = {0};
//接收一个字符串
char* get_string()
{
int i=0;
put_char('\n');
put_char('\r');
//1.循环进行接收
for(i=0; i<49; i++)
{
while(!(USART4->ISR & (0x1 << 5)));
if(USART4->RDR == '\r')
{
put_char('\n');
put_char('\r');
buffer[i] = '\0';
break;
}
buffer[i]=(char)(USART4->RDR);
put_char(buffer[i]);
}
//3.字符串补'\0'
if(i == 49)
{
put_char('\n');
put_char('\r');
buffer[49]='\0';
}