一:典型II系统的开环伯德图
上一节讲了电机控制中速度环的开环传递函数,然后按照典型II系统整定。下面讲下典型II系统的整定方法。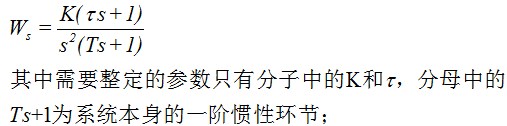
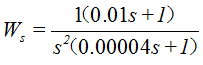
假设系统本身的一阶惯性环中 T = 0.00004s(T = 4*Ts,Ts为采样时间0.00001s),我们先令 K = 1,τ = 0.01s,画出系统的开环传递函数的伯德图,再选择合适的中频带宽,和相位裕度来整定K和τ:
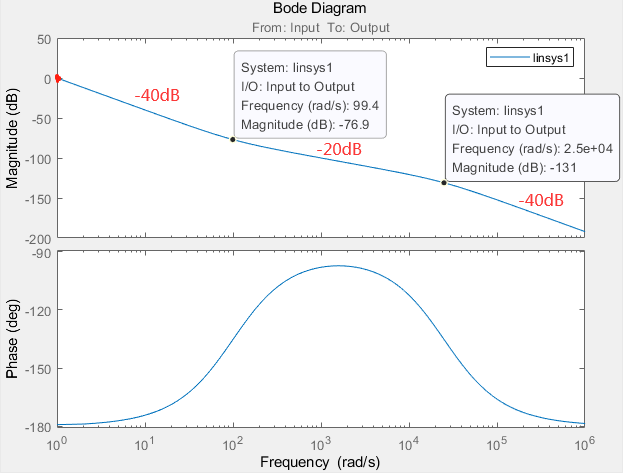
解读下开环系统的伯德图:
- 有两个纯积分环节,幅频特性初始斜率为-40dB/dec,初始相位角度为-180°
- 两个转折频率分为 w1 = 1/0.01 = 100rad/s, w2 = 1/0.00004 = 25000rad/s 。
- w1 微分环节的转折频率,会导致幅频特性的曲线斜率减小-20dB/dec,相频幅值上升90°
- w2 惯性环节的转折频率,会导致幅频特性的曲线斜率增大-20dB/dec,相频幅值下降90°
- 在w1左侧的为低频带,在w1和w2之间的为中频带,在w2的右侧为高频带
- 在低频带的幅相频曲线,由开环增益K和两个纯积分环节决定, 即1 s 2 \frac{1}{s^{2}}s21决定
所以低频段的渐近线为L ( w ) = − 40 l o g w + 20 l o g 1 L_{(w)}= -40logw + 20log1L(w)=−40logw+20log1,经过点( 1 0 0 , 0 ) (10^{0}, 0)(100,0)
二:开环传函中增益系数K和τ的整定
在自动控制系统里面,有两个非常关键的结论:
1: 中频带宽决定了系统的响应速度
2: 截止频率的相位裕度决定了系统的稳定性
所以参数的整定,其实是对中频带宽,和相位裕度的优化。
2.1、 设计中频带宽,计算τ
那么转速环一般需要多大的带宽呢?这个我认为是根据采样频率定的,比如采样时间为0.00001s,那么惯性环节的转折频率就是1/0.00004=25000rad/s,而lg25000 = 4.39。那么我们转速环带宽就可以设计为2.5的宽度,即lg25000 - lg x = 2.5。这样低频段的带宽为4.39 - 2.5 = 1.89(因为低频段带宽至少需要1.5的宽度) 求得 x = 80rad/s, τ = 1/x = 0.0125。这样根据中频带宽就确定了τ。
所以τ的计算公式为: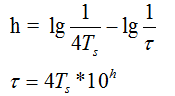
2.2、 设计相位裕度,计算K
截止频率处的相位裕度比较好确定,至少为45°
我们要取个巧,因为我们知道相频曲线的最高点,如果我们把相频曲线最高点对应的频率,设置为系统的截止频率。那么就能保证相位裕度为最大值。
因为第二个转折频率 lg25000 = 4.39(4.4),而第一个转折频率为 lg80 = 1.9。那么中点的位置就是 1.9+2.5/2=3.15。截止频率wc = 10^(3.15) = 1412rad/s,这样截止频率的计算公式为:
那wc和K又有什么关系呢?
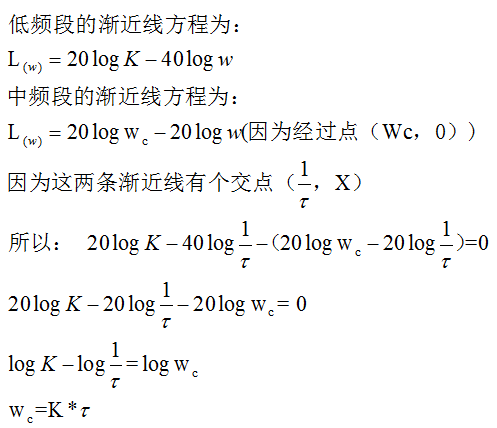
所以最终K,τ参数整定的公式为: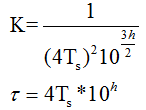
那么根据上面的公式,计算得到 K = 111140;τ = 0.0126;所以开环传递函数为: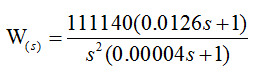
闭环传递函数框图为:
开环传函的伯德图为: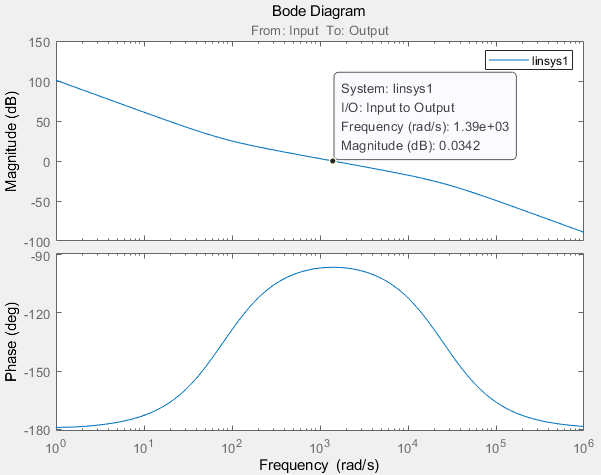
开环系统的截止频率wc = Kτ = 111140 0.0126 = 1405rad/s,和上图中的截止频率可以对应上;
闭环传函的伯德图为: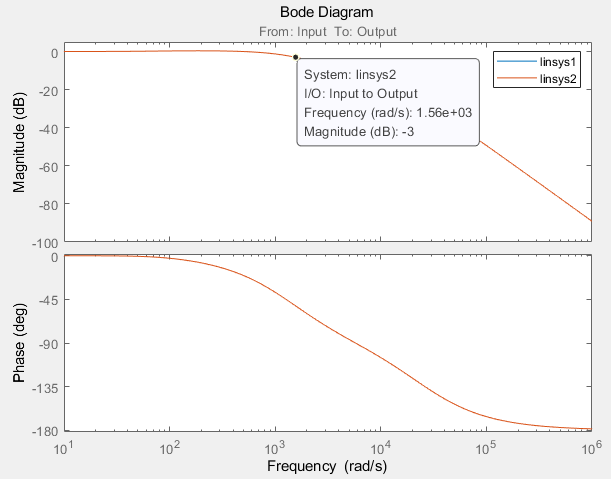
可以看出闭环系统的截止频率(wb = 1560rad/s)略大于开环系统的截止频率(wc=1405rad/s)。
三:开环增益K和微分常数τ对开环伯德图的影响
上面我们把系统的开环传函最终整定为: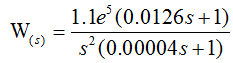
下面我们分别单独改变K和τ,然后查看开环伯德图的变换: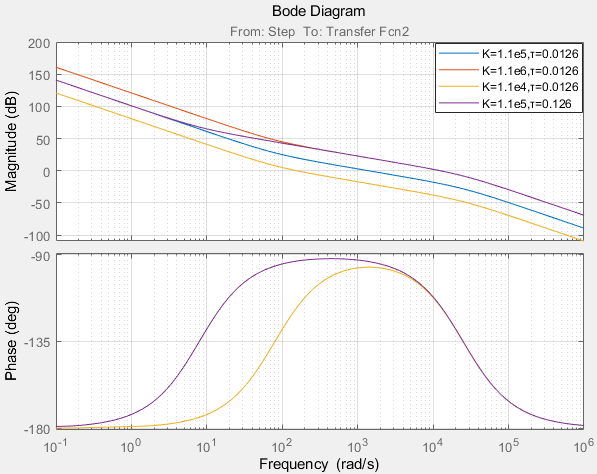
- K增大,τ不变,==>中频带宽不变, 幅频曲线向上移动,截止频率 wc 增大
- K减小,τ不变,==>中频带宽不变, 幅频曲线向下移动,截止频率 wc 减小
- τ变大,K不变,==>中频带宽变大,截止频率 wc 增大(因为斜率为 -40dB 的持续时间变短)
- τ变小,K不变,==>中频带宽变小,截止频率 wc 变小(因为斜率为 -40dB 的持续时间变长)
文章参考:https://blog.csdn.net/sy243772901/article/details/110246280