目录
一、前言
在上一篇博文已经详细讲解了ROS系统通过有线及无线两种方式进行SSH远程连接的方式,接下来讲一下ROS的主从机设置和远程控制。ROS的主从机设置及远程控制是建立在ROS之间建立了通讯连接的基础上的,还不清楚的可以先回顾以下上一篇博文。
二、ROS远程控制及主从机设置
1、首先给出所谓远程控制的应用场景:
在本机电脑的ROS端执行相关代码,实现机器人ROS端的运动控制。其中很重要的一点就是机器人ROS端没有本机电脑代码运行的所需要的环境,打个比方,机器视觉中CV的相关依赖库一般很难在嵌入式ROS环境中安装,这个时候就只能远程控制了。
2、实现方法:
将机器人ROS端设置为主机、将本机电脑ROS端设置为从机。
3、什么是主从机:
我给出一种自己的通俗理解。我们在运行ROS代码或者ROS指令时,前提是ROS系统已经启动,一般我们通过如下指令启动ROS系统。
roscore所谓主机,就是需要启动ROS系统的终端,一般都为执行终端(比如机器人、机器臂等),然后通过多机通信连接上主机的其他ros终端,都需要设置成从机。这样所有从机都能实现对主机的控制。
4、如何进行主从机设置:
修改.bashrc文件
只需要修改从机的.bashrc文件即可,主机的不需要修改。流程如下:
(1)打开.bashrc文件
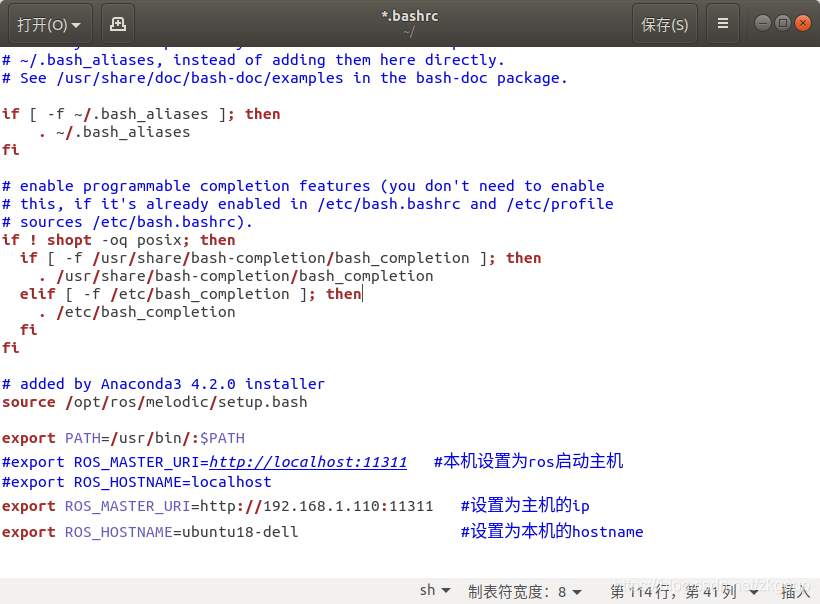
gedit ~/.bashrc(2)在.bashrc文件最后加入两行代码
如下图所示,即加入图中高亮的两行即可。即将ROS_MASTER_URI指向主机的ip,其中192.168.1.110需要设置为主机的ip,端口11311不需要改。ROS_HOSTNAME设置为本机的hostname(如果不知道这里的hostname怎么设置,可以看一下上一篇博文),实在不行的话,直接把export ROS_HOSTNAME=ubuntu18-dell(your hostname)注释掉也可。
版权声明:本文为zkgoup原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。