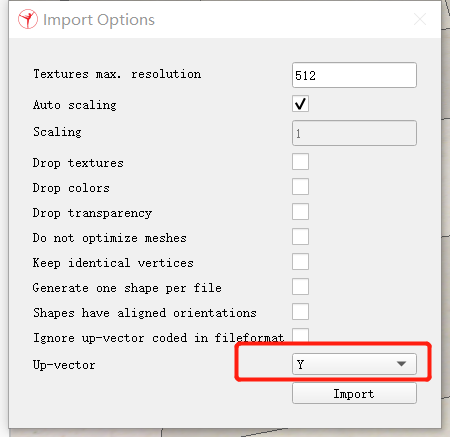
1)STL文件导入
2)形状提取

3)创建revolute轴,与生成的形状同位置同轴心
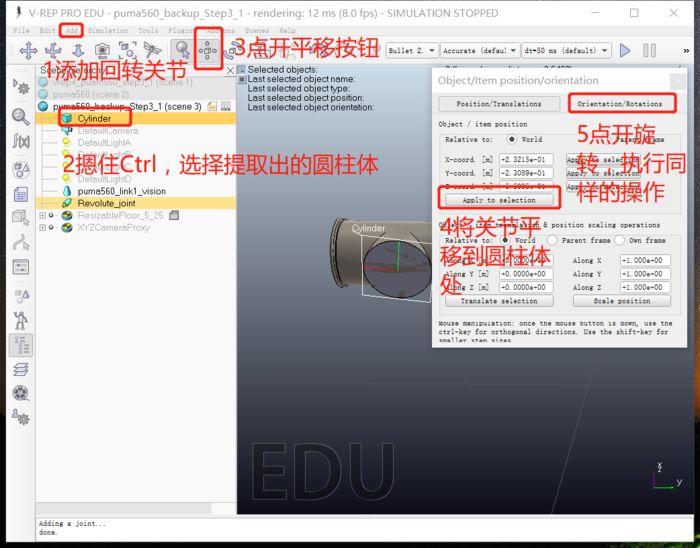
4)提取凸面体结构
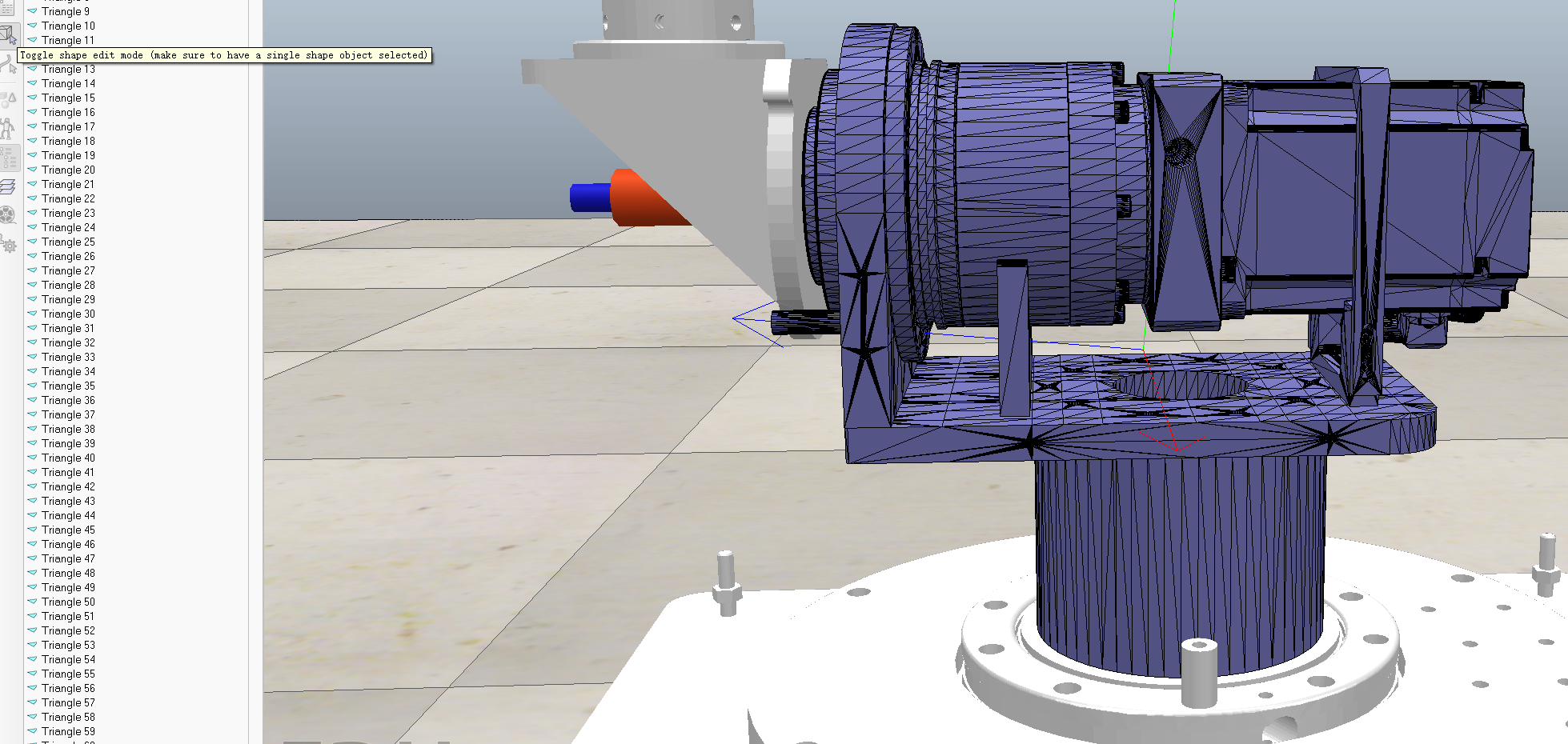
由于导入的stl文件是mesh属性,实际上仅仅是一层薄壳,不具备动力学特征(质量和转动惯量,就是你点开始仿真,并不会自由落体),而且如果直接用导入模型的话由于细节太丰富,所以极大的影响仿真速度,一般都会将其简化成vrep自带的primitive shape或者是凸面结构(凹面结构物理引擎可能产生很诡异的现象)
把mesh文件拷贝到一个backup sence里创建凸面体结构,创建好后再拷贝会源sence
执行下图的操作(Edit->Morph selection into convex shapes)
隐藏凸面体 : 勾在下面是隐藏

5) 设置动力学属性
此时电机开始仿真发现仍然没有自由落体,因为还没有设置动力学属性。接下来我们设置凸面体的质量和respondable的属性。这里从RRRR_L1(应该是从baselinkL0)开始,根据下图设置动力学属性,注意local respondable mask是仅点第一个对勾。
注意Link0的B o d y i s d y n a m i c Body \, is \, dynamicBodyisdynamic不要打勾,打勾了仿真过程中底座会跳
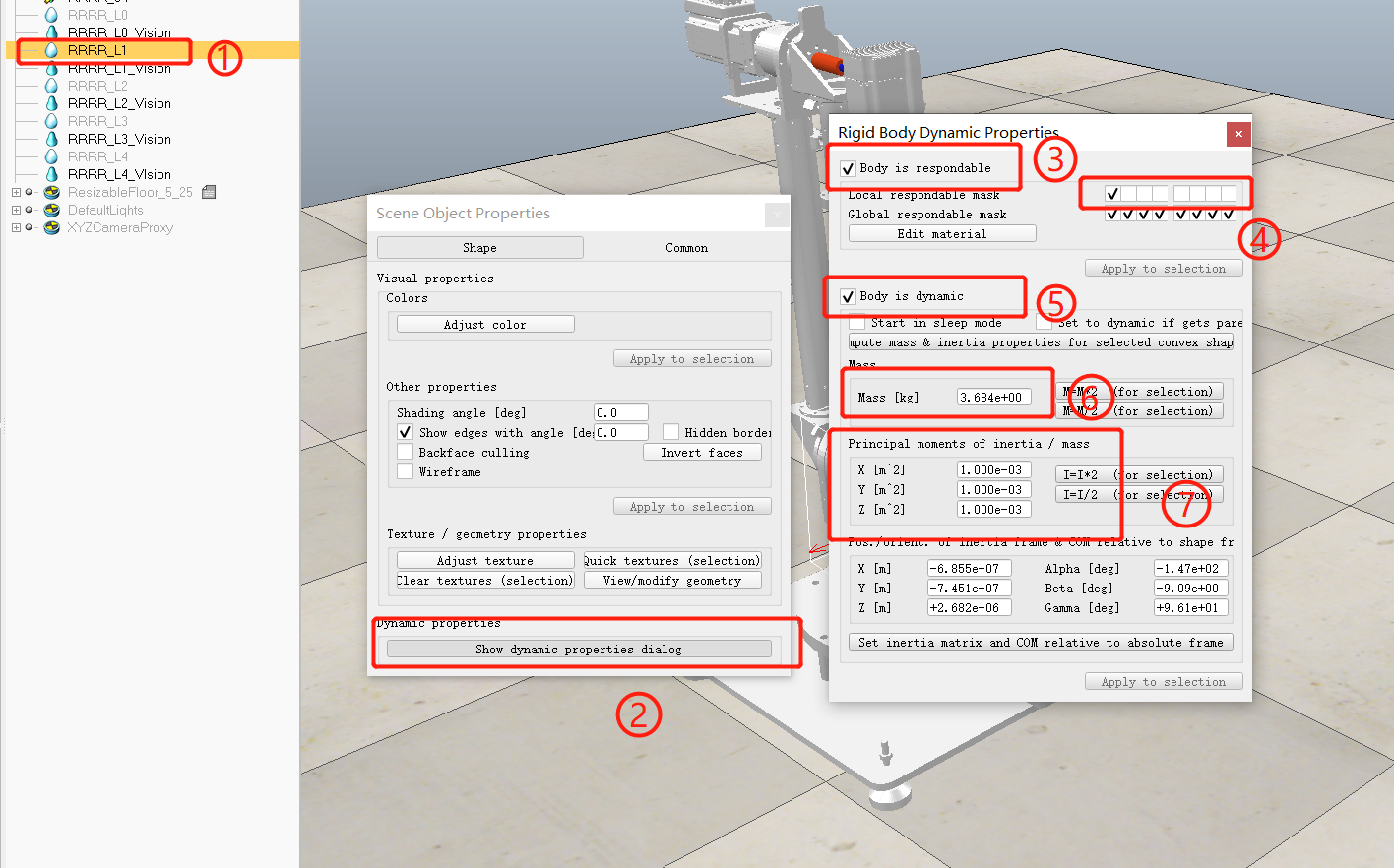
根据同样的方式设置link2——link5的动力学属性,唯一差别为local respondable mask依次点第二个对勾、第三个对勾
6:质量
7:惯性主轴和主惯性矩,在solidworks里是k g ⋅ m m 2 kg\cdot mm^2kg⋅mm2 vrep里是k g ⋅ m 2 kg\cdot m^2kg⋅m2 注意单位转换!!
6)给关节添加扭矩
此时点击仿真,发现机械臂会立即垮掉,原因是因为添加的关键无法提供足够的扭矩保持平衡,我们这里打开关节的位置控制模式,如下图:(注意要设置一下关节扭矩,默认2.5Nm太小了,这里先设置为100Nm)


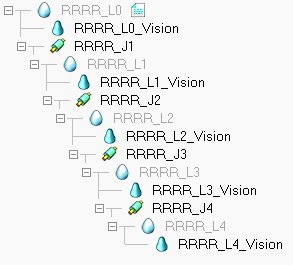
7) 将机械臂结构树搭建好