【机器人学】正运动学详解
机器人学中的正运动学
本文对机器人学基本知识中的正运动学(Forward Kinematics)进行介绍,适合入门学习机器人学,如果你发现本文有疏漏、错误之处,欢迎读者批评指正。如果你喜欢本文,可以收藏本文,也可将本文分享给你的朋友、同学,但是转载不被允许
一、位置( P o s i t i o n ) (Position)(Position)表示
笛卡尔坐标
P = ( x y z ) \it{P}=\left(\begin{matrix} x\\y\\z \end{matrix}\right)P=⎝⎛xyz⎠⎞柱坐标
变量:v a r i a b l e s = ( ρ θ z ) variables=\left(\begin{matrix} \rho\\\theta\\z \end{matrix}\right)variables=⎝⎛ρθz⎠⎞
因此,位置 P \it PP 可以表示为:
P = ( ρ cos θ ρ sin θ z ) \it{P}=\left(\begin{matrix} \rho\cos\theta\\\rho\sin\theta\\z \end{matrix}\right)P=⎝⎛ρcosθρsinθz⎠⎞
球坐标
变量:v a r i a b l e s = ( r θ ϕ ) variables=\left(\begin{matrix} r\\\theta\\\phi \end{matrix}\right)variables=⎝⎛rθϕ⎠⎞
因此,位置 P \it PP 可以表示为:
P = ( r sin θ cos ϕ r sin θ sin ϕ r cos θ ) \it{P}=\left(\begin{matrix} r\sin\theta\cos\phi\\ r\sin\theta\sin\phi\\ r\cos\theta \end{matrix}\right)P=⎝⎛rsinθcosϕrsinθsinϕrcosθ⎠⎞
二、方向( O r i e n t a t i o n ) (Orientation)(Orientation)表示
2.1 基本公式
绕X XX轴旋转角γ \gammaγ,旋转矩阵为:
R γ = [ 1 0 0 0 cos γ − sin γ 0 sin γ cos γ ] R_\gamma=\left[\begin{matrix} 1&0&0\\0&\cos\gamma&-\sin\gamma\\0&\sin\gamma&\cos\gamma \end{matrix}\right]Rγ=⎣⎡1000cosγsinγ0−sinγcosγ⎦⎤
绕Y YY轴旋转角β \betaβ,旋转矩阵为:
R β = [ cos β 0 sin β 0 1 0 − sin β 0 cos β ] R_\beta=\left[\begin{matrix} \cos\beta&0&\sin\beta\\ 0&1&0\\ -\sin\beta&0&\cos\beta \end{matrix}\right]Rβ=⎣⎡cosβ0−sinβ010sinβ0cosβ⎦⎤
绕Z ZZ轴旋转角α \alphaα,旋转矩阵为:
R α = [ cos α − sin α 0 sin α cos α 0 0 0 1 ] R_\alpha=\left[\begin{matrix} \cos\alpha&-\sin\alpha&0\\ \sin\alpha&\cos\alpha&0\\ 0&0&1 \end{matrix}\right]Rα=⎣⎡cosαsinα0−sinαcosα0001⎦⎤
一个坐标系{ B } \{B\}{B}相对另一个坐标系{ A } \{A\}{A}
B A R = [ n → o → a → ] = [ n x o x a x n y o y a y n z o z a z ] (1) ^A_BR=\left[\begin{matrix} \overrightarrow{n}&\overrightarrow{o}&\overrightarrow{a} \end{matrix}\right]= \left[\begin{matrix} n_x&o_x&a_x\\ n_y&o_y&a_y\\ n_z&o_z&a_z \end{matrix}\right]\tag{1}BAR=[noa]=⎣⎡nxnynzoxoyozaxayaz⎦⎤(1)
我们容易知道三维空间中的方向只有3个自由度,而上述表达方式含有9个变量,因此我们需要添加6个约束如下:
- n → ⋅ o → = 0 \overrightarrow{\bf n}\cdot\overrightarrow{\bf o}=0n⋅o=0
- n → ⋅ a → = 0 \overrightarrow{\bf n}\cdot\overrightarrow{\bf a}=0n⋅a=0
- a → ⋅ o → = 0 \overrightarrow{\bf a}\cdot\overrightarrow{\bf o}=0a⋅o=0
- ∣ n → ∣ = 1 \left|\overrightarrow{n}\right|=1∣∣n∣∣=1
- ∣ o → ∣ = 1 \left|\overrightarrow{o}\right|=1∣∣o∣∣=1
- ∣ a → ∣ = 1 \left|\overrightarrow{a}\right|=1∣∣a∣∣=1
当然我们也可以根据它们的几何关系将上述约束简化为:
- n → ⋅ o → = 0 \overrightarrow{\bf n}\cdot\overrightarrow{\bf o}=0n⋅o=0
- a → = n → × o → \overrightarrow{\bf a}=\overrightarrow{\bf n}\times\overrightarrow{\bf o}a=n×o
- ∣ n → ∣ = 1 \left|\overrightarrow{n}\right|=1∣∣n∣∣=1
- ∣ o → ∣ = 1 \left|\overrightarrow{o}\right|=1∣∣o∣∣=1
- ∣ a → ∣ = 1 \left|\overrightarrow{a}\right|=1∣∣a∣∣=1
2.2 RPY角
假设坐标系{ B } \{B\}{B}初始时与参考坐标系{ A } \{A\}{A}重合,先绕坐标系{ A } \{A\}{A}的X A X_AXA轴旋转角γ \gammaγ,再绕坐标系{ A } \{A\}{A}的Y A Y_AYA轴旋转角β \betaβ,最后绕坐标系{ A } \{A\}{A}的Z A Z_AZA轴旋转角α \alphaα。在上述过程中,各个旋转量表达如下:
| Name | 中文名 | 表达式 | 所绕轴 |
|---|---|---|---|
| R o l l RollRoll | 横滚角 | γ \gammaγ | X XX |
| P i t c h PitchPitch | 俯仰角 | β \betaβ | Y YY |
| Y a w YawYaw | 航向角 | α \alphaα | Z ZZ |

则{ B } \{B\}{B}相对于{ A } \{A\}{A}最终的姿态为:
B A R = R Z ( α ) R Y ( β ) R X ( γ ) (2) ^A_BR=R_Z(\alpha)R_Y(\beta)R_X(\gamma)\tag{2}BAR=RZ(α)RY(β)RX(γ)(2)
具体计算为:
B A R = R Z ( α ) R Y ( β ) R X ( γ ) = [ cos α − sin α 0 sin α cos α 0 0 0 1 ] × [ cos β 0 sin β 0 1 0 − sin β 0 cos β ] × [ 1 0 0 0 cos γ − sin γ 0 sin γ cos γ ] = [ c α − s α 0 s α c α 0 0 0 1 ] × [ c β 0 s β 0 1 0 − s β 0 c β ] × [ 1 0 0 0 c γ − s γ 0 s γ c γ ] = [ c α c β c α s β s γ − s α c γ c α s β c γ + s α s γ s α c β s α s β s γ + c α c γ s γ s β c α − c α s γ − s β c β s γ c β c γ ] = [ n x o x a x n y o y a y n z o z a z ] (3) \begin{aligned} ^A_BR&=R_Z(\alpha)R_Y(\beta)R_X(\gamma)\\ &=\left[\begin{matrix} \cos\alpha&-\sin\alpha&0\\ \sin\alpha&\cos\alpha&0\\ 0&0&1 \end{matrix}\right]\times \left[\begin{matrix} \cos\beta&0&\sin\beta\\ 0&1&0\\ -\sin\beta&0&\cos\beta \end{matrix}\right]\times \left[\begin{matrix} 1&0&0\\0&\cos\gamma&-\sin\gamma\\0&\sin\gamma&\cos\gamma \end{matrix}\right]\\ &=\left[\begin{matrix} c\alpha&-s\alpha&0\\ s\alpha&c\alpha&0\\ 0&0&1 \end{matrix}\right]\times \left[\begin{matrix} c\beta&0&s\beta\\ 0&1&0\\ -s\beta&0&c\beta \end{matrix}\right]\times \left[\begin{matrix} 1&0&0\\0&c\gamma&-s\gamma\\0&s\gamma&c\gamma \end{matrix}\right]\\ &=\left[\begin{matrix} c\alpha c\beta&c\alpha s\beta s\gamma-s\alpha c\gamma&c\alpha s\beta c\gamma+s\alpha s\gamma\\ s\alpha c\beta&s\alpha s\beta s\gamma+c\alpha c\gamma&s\gamma s\beta c\alpha-c\alpha s\gamma\\ -s\beta&c\beta s\gamma&c\beta c\gamma \end{matrix}\right]\\ &=\left[\begin{matrix} n_x&o_x&a_x\\ n_y&o_y&a_y\\ n_z&o_z&a_z \end{matrix}\right] \end{aligned}\tag{3}BAR=RZ(α)RY(β)RX(γ)=⎣⎡cosαsinα0−sinαcosα0001⎦⎤×⎣⎡cosβ0−sinβ010sinβ0cosβ⎦⎤×⎣⎡1000cosγsinγ0−sinγcosγ⎦⎤=⎣⎡cαsα0−sαcα0001⎦⎤×⎣⎡cβ0−sβ010sβ0cβ⎦⎤×⎣⎡1000cγsγ0−sγcγ⎦⎤=⎣⎡cαcβsαcβ−sβcαsβsγ−sαcγsαsβsγ+cαcγcβsγcαsβcγ+sαsγsγsβcα−cαsγcβcγ⎦⎤=⎣⎡nxnynzoxoyozaxayaz⎦⎤(3)
2.3 欧拉角
Z-Y-X \textbf{Z-Y-X}Z-Y-X欧拉角
假设坐标系{ B } \{B\}{B}初始时与参考坐标系{ A } \{A\}{A}重合,先绕坐标系{ B } \{B\}{B}的Z B Z_BZB轴旋转角α \alphaα,再绕坐标系{ B } \{B\}{B}的Y B Y_BYB轴旋转角β \betaβ,最后绕坐标系{ B } \{B\}{B}的X B X_BXB轴旋转角γ \gammaγ。则{ B } \{B\}{B}相对于{ A } \{A\}{A}最终的姿态为:
B A R = R Z ( α ) R Y ( β ) R X ( γ ) = [ c α c β c α s β s γ − s α c γ c α s β c γ + s α s γ s α c β s α s β s γ + c α c γ s α s β c γ − c α s γ − s β c β s γ c β c γ ] (4) ^A_BR=R_Z(\alpha)R_Y(\beta)R_X(\gamma)\\ =\left[\begin{matrix} c\alpha c\beta&c\alpha s\beta s\gamma-s\alpha c\gamma&c\alpha s\beta c\gamma+s\alpha s\gamma\\ s\alpha c\beta&s\alpha s\beta s\gamma+c\alpha c\gamma&s\alpha s\beta c\gamma-c\alpha s\gamma\\ -s\beta&c\beta s\gamma&c\beta c\gamma \end{matrix}\right]\tag{4}BAR=RZ(α)RY(β)RX(γ)=⎣⎡cαcβsαcβ−sβcαsβsγ−sαcγsαsβsγ+cαcγcβsγcαsβcγ+sαsγsαsβcγ−cαsγcβcγ⎦⎤(4)
Z-Y-Z \textbf{Z-Y-Z}Z-Y-Z欧拉角
假设坐标系{ B } \{B\}{B}初始时与参考坐标系{ A } \{A\}{A}重合,先绕坐标系{ B } \{B\}{B}的Z B Z_BZB轴旋转角α \alphaα,再绕坐标系{ B } \{B\}{B}的Y B Y_BYB轴旋转角β \betaβ,最后绕坐标系{ B } \{B\}{B}的Z B Z_BZB轴旋转角γ \gammaγ。则{ B } \{B\}{B}相对于{ A } \{A\}{A}最终的姿态为:
B A R = R Z ( α ) R Y ( β ) R Z ( γ ) = [ c α c β c γ − s α s γ − c α c β s γ − s α c γ c α s β s α c β c γ + c α s γ − s α c β s γ + c α c γ s α s β − s β c γ s β s γ c β ] (5) ^A_BR=R_Z(\alpha)R_Y(\beta)R_Z(\gamma)\\ =\left[\begin{matrix} c\alpha c\beta c\gamma-s\alpha s\gamma&-c\alpha c\beta s\gamma-s\alpha c\gamma&c\alpha s\beta\\ s\alpha c\beta c\gamma+c\alpha s\gamma&-s\alpha c\beta s\gamma+c\alpha c\gamma&s\alpha s\beta\\ -s\beta c\gamma&s\beta s\gamma&c\beta \end{matrix}\right]\tag{5}BAR=RZ(α)RY(β)RZ(γ)=⎣⎡cαcβcγ−sαsγsαcβcγ+cαsγ−sβcγ−cαcβsγ−sαcγ−sαcβsγ+cαcγsβsγcαsβsαsβcβ⎦⎤(5)
三、平移运动( D i s p l a c e m e n t ) (Displacement)(Displacement)
不妨假设坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵为B A T ^A_BTBAT:
B A T = [ n x o x a x p x n y o y a y p y n z o z a z p z 0 0 0 1 ] = [ n ⃗ o ⃗ a ⃗ p ⃗ ] ^A_BT=\left[\begin{matrix} n_x&o_x&a_x&p_x\\ n_y&o_y&a_y&p_y\\ n_z&o_z&a_z&p_z\\ 0&0&0&1 \end{matrix}\right]=\left[\begin{matrix}\vec{n}&\vec{o}&\vec{a}&\vec{p}\end{matrix}\right]BAT=⎣⎡nxnynz0oxoyoz0axayaz0pxpypz1⎦⎤=[noap]
第一种情况:坐标系{ B } \{B\}{B}沿着坐标系{ A } \{A\}{A}的坐标轴平移A Δ p ⃗ = [ Δ p x Δ p x Δ p x 0 ] T ^A\Delta \vec{p}=\begin{matrix}[\Delta{p_x}&\Delta{p_x}&\Delta{p_x}&0]^T\end{matrix}AΔp=[ΔpxΔpxΔpx0]T。
那么平移后坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵为B A T ′ ^A_BT'BAT′:
B A T ′ = T d i s p × B A T = [ 1 0 0 Δ p x 0 1 0 Δ p y 0 0 1 Δ p z 0 0 0 1 ] × [ n x o x a x p x n y o y a y p y n z o z a z p z 0 0 0 1 ] = [ n x o x a x p x + Δ p x n y o y a y p y + Δ p y n z o z a z p z + Δ p z 0 0 0 1 ] = [ n ⃗ o ⃗ a ⃗ p ⃗ + A Δ p ⃗ ] (6) \begin{aligned}^A_BT'&=T_{disp}\times^A_BT\\ &=\left[\begin{matrix} 1&0&0&\Delta{p_x}\\ 0&1&0&\Delta{p_y}\\ 0&0&1&\Delta{p_z}\\ 0&0&0&1 \end{matrix}\right] \times\left[\begin{matrix} n_x&o_x&a_x&p_x\\ n_y&o_y&a_y&p_y\\ n_z&o_z&a_z&p_z\\ 0&0&0&1 \end{matrix}\right]\\ &=\left[\begin{matrix} n_x&o_x&a_x&p_x+\Delta{p_x}\\ n_y&o_y&a_y&p_y+\Delta{p_y}\\ n_z&o_z&a_z&p_z+\Delta{p_z}\\ 0&0&0&1 \end{matrix}\right]\\ &=\left[\begin{matrix}\vec{n}&\vec{o}&\vec{a}&\vec{p}+^A\Delta \vec{p}\end{matrix}\right] \end{aligned}\tag{6}BAT′=Tdisp×BAT=⎣⎡100001000010ΔpxΔpyΔpz1⎦⎤×⎣⎡nxnynz0oxoyoz0axayaz0pxpypz1⎦⎤=⎣⎡nxnynz0oxoyoz0axayaz0px+Δpxpy+Δpypz+Δpz1⎦⎤=[noap+AΔp](6)
第二种情况:坐标系{ B } \{B\}{B}沿着坐标系{ B } \{B\}{B}的坐标轴平移B Δ p ⃗ = [ Δ p x ′ Δ p y ′ Δ p z ′ ] T ^B\Delta \vec{p}=\begin{matrix}[\Delta{p_x'}&\Delta{p_y'}&\Delta{p_z'}]^T\end{matrix}BΔp=[Δpx′Δpy′Δpz′]T。
那么平移后坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵为B A T ′ ^A_BT'BAT′。
显然,平移运动不会改变坐标系中轴的方向(O r i e n t a t i o n OrientationOrientation),因此我们只需要关心[ p x p y p z 0 ] T \begin{matrix}[p_x&p_y&p_z&0]^T\end{matrix}[pxpypz0]T的变化。
因此,为了得到[ p x p y p z 0 ] T \begin{matrix}[p_x&p_y&p_z&0]^T\end{matrix}[pxpypz0]T的变化,我们需要将[ B Δ p ⃗ 0 ] \left[\begin{matrix}^B\Delta\vec{p}\\0\end{matrix}\right][BΔp0]转化为[ A Δ p ⃗ 0 ] \left[\begin{matrix}^A\Delta\vec{p}\\0\end{matrix}\right][AΔp0],而我们知道[ B Δ p ⃗ 0 ] \left[\begin{matrix}^B\Delta\vec{p}\\0\end{matrix}\right][BΔp0]可以在B A T ^A_BTBAT的作用下得到[ A Δ p ⃗ 0 ] \left[\begin{matrix}^A\Delta\vec{p}\\0\end{matrix}\right][AΔp0]:
[ B Δ p ⃗ 0 ] = B A T × [ B Δ p ⃗ 0 ] = [ n x o x a x p x n y o y a y p y n z o z a z p z 0 0 0 1 ] × [ Δ p x ′ Δ p y ′ Δ p z ′ 0 ] = Δ p x ′ × n ⃗ + Δ p y ′ × o ⃗ + Δ p z ′ × a ⃗ (7) \begin{aligned}\left[\begin{matrix}^B\Delta\vec{p}\\0\end{matrix}\right]&=^A_BT\times\left[\begin{matrix}^B\Delta\vec{p}\\0\end{matrix}\right]\\ &=\left[\begin{matrix} n_x&o_x&a_x&p_x\\ n_y&o_y&a_y&p_y\\ n_z&o_z&a_z&p_z\\ 0&0&0&1 \end{matrix}\right]\times\left[\begin{matrix}\Delta{p_x'}\\\Delta{p_y'}\\\Delta{p_z'}\\0\end{matrix}\right]\\ &=\Delta{p_x'}\times\vec{n}+\Delta{p_y'}\times\vec{o}+\Delta{p_z'}\times\vec{a} \end{aligned}\tag{7}[BΔp0]=BAT×[BΔp0]=⎣⎡nxnynz0oxoyoz0axayaz0pxpypz1⎦⎤×⎣⎡Δpx′Δpy′Δpz′0⎦⎤=Δpx′×n+Δpy′×o+Δpz′×a(7)
最终齐次变换矩阵B A T ′ ^A_BT'BAT′为:
B A T ′ = [ n ⃗ o ⃗ a ⃗ p ⃗ + Δ p x ′ × n ⃗ + Δ p y ′ × o ⃗ + Δ p z ′ × a ⃗ ] = [ n ⃗ o ⃗ a ⃗ p ⃗ ] × [ I 3 B Δ p ⃗ 0 ⃗ 1 × 3 1 ] = B A T × [ I 3 B Δ p ⃗ 0 ⃗ 1 × 3 1 ] (8) \begin{aligned}^A_BT'&=\begin{matrix}[\vec{n}&\vec{o}&\vec{a}&\vec{p}+\Delta{p_x'}\times\vec{n}+\Delta{p_y'}\times\vec{o}+\Delta{p_z'}\times\vec{a}]\end{matrix}\\ &=\begin{matrix}[\vec{n}&\vec{o}&\vec{a}&\vec{p}]\end{matrix}\times \left[\begin{matrix} I_3&^B\Delta\vec{p}\\ \vec{0}_{1\times3}&1 \end{matrix}\right]\\ &=^A_BT\times\left[\begin{matrix} I_3&^B\Delta\vec{p}\\ \vec{0}_{1\times3}&1 \end{matrix}\right] \end{aligned}\tag{8}BAT′=[noap+Δpx′×n+Δpy′×o+Δpz′×a]=[noap]×[I301×3BΔp1]=BAT×[I301×3BΔp1](8)
多次平移可由重复上述表达式得到。
四、旋转运动( R o t a t i o n ) (Rotation)(Rotation)
不妨假设坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵为B A T ^A_BTBAT。
第一种情况:坐标系{ B } \{B\}{B}依次绕绝对坐标系{ A } \{A\}{A}的坐标轴M i M_iMi旋转θ i \theta_iθi角(i = 1 , 2 , 3 , ⋯ , n i=1,2,3,\cdots,ni=1,2,3,⋯,n),每次旋转的齐次变换矩阵为T i T_iTi(T i = [ R M i ( θ i ) 0 ⃗ 3 × 1 0 ⃗ 1 × 3 1 ] T_i=\left[\begin{matrix}R_{M_{i}}(\theta_i)&\vec{0}_{3\times1}\\\vec{0}_{1\times3}&1\end{matrix}\right]Ti=[RMi(θi)01×303×11],R M i ( θ i ) R_{M_{i}}(\theta_i)RMi(θi)可由2.1节得到),最终旋转后坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵B A T ′ ^A_BT'BAT′为:
B A T ′ = T n × T n − 1 × ⋯ T i × ⋯ T 1 × B A T (9) \begin{aligned} ^A_BT'&=T_{n}\times T_{n-1}\times\cdots T_i\times\cdots T_1\times{^A_B}T \end{aligned}\tag{9}BAT′=Tn×Tn−1×⋯Ti×⋯T1×BAT(9)
第二种情况:坐标系{ B } \{B\}{B}依次绕相对坐标系{ B } \{B\}{B}的坐标轴M i M_iMi旋转θ i \theta_iθi角(i = 1 , 2 , 3 , ⋯ , n i=1,2,3,\cdots,ni=1,2,3,⋯,n),每次旋转的齐次变换矩阵为T i T_iTi(T i = [ R M i ( θ i ) 0 ⃗ 3 × 1 0 ⃗ 1 × 3 1 ] T_i=\left[\begin{matrix}R_{M_{i}}(\theta_i)&\vec{0}_{3\times1}\\\vec{0}_{1\times3}&1\end{matrix}\right]Ti=[RMi(θi)01×303×11],R M i ( θ i ) R_{M_{i}}(\theta_i)RMi(θi)可由2.1节得到),最终旋转后坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵B A T ′ ^A_BT'BAT′为:
B A T ′ = B A T × T 1 × T 2 × ⋯ T i × ⋯ T n (10) \begin{aligned} ^A_BT'&={^A_B}T\times T_{1}\times T_{2}\times\cdots T_i\times\cdots T_n \end{aligned}\tag{10}BAT′=BAT×T1×T2×⋯Ti×⋯Tn(10)
五、复合运动( C o m p o u n d ) (Compound)(Compound)
综合3&4节我们可以得到:
不妨假设坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵为B A T ^A_BTBAT。
将坐标系{ B } \{B\}{B}依次相对于坐标系{ A / B } \{A/B\}{A/B}的轴M MM旋转θ \thetaθ角/平移d dd位移,⋯ \cdots⋯。
对上述过程进行合理排序,得到如下描述:
将坐标系{ B } \{B\}{B}依次相对于坐标系{ A } \{A\}{A}运动(旋转/平移)o i o_ioi,每次运动对应的齐次变换矩阵为T i , i = 1 , 2 , 3 , ⋯ , m T_i,i=1,2,3,\cdots,mTi,i=1,2,3,⋯,m;将坐标系{ B } \{B\}{B}依次相对于坐标系{ B } \{B\}{B}运动(旋转/平移)o j ′ o'_joj′,每次运动对应的齐次变换矩阵为T j , j = 1 , 2 , 3 , ⋯ , n T_j,j=1,2,3,\cdots,nTj,j=1,2,3,⋯,n。
依据已知知识,我们不难得到:
若o i o_ioi为平移量,那么T i = [ I 3 × 3 Δ p ⃗ i 0 ⃗ 1 × 3 1 ] T_i=\left[\begin{matrix}I_{3\times3}&\Delta\vec{p}_i\\\vec{0}_{1\times3}&1\end{matrix}\right]Ti=[I3×301×3Δpi1];如果o i o_ioi为旋转量,那么T i = [ R M i ( θ i ) 0 ⃗ 3 × 1 0 ⃗ 1 × 3 1 ] T_i=\left[\begin{matrix}R_{M_{i}}(\theta_i)&\vec{0}_{3\times1}\\\vec{0}_{1\times3}&1\end{matrix}\right]Ti=[RMi(θi)01×303×11]。
若o j ′ o'_joj′为平移量,那么T j = [ I 3 B Δ p ⃗ j 0 ⃗ 1 × 3 1 ] T_j=\left[\begin{matrix}I_3&^B\Delta\vec{p}_j\\\vec{0}_{1\times3}&1\end{matrix}\right]Tj=[I301×3BΔpj1];如果o j ′ o'_joj′为旋转量,那么T j = [ R M j ( θ j ) 0 ⃗ 3 × 1 0 ⃗ 1 × 3 1 ] T_j=\left[\begin{matrix}R_{M_{j}}(\theta_j)&\vec{0}_{3\times1}\\\vec{0}_{1\times3}&1\end{matrix}\right]Tj=[RMj(θj)01×303×11]。
运动后坐标系{ B } \{B\}{B}相对于坐标系{ A } \{A\}{A}的齐次变换矩阵B A T ′ ^A_BT'BAT′为:
B A T ′ = T m × T m − 1 × ⋯ T i × ⋯ T 1 × B A T × T 1 × T 2 × ⋯ T j × ⋯ T n (11) \begin{aligned} ^A_BT'&=T_{m}\times T_{m-1}\times\cdots T_i\times\cdots T_1\times{^A_B}T\times T_{1}\times T_{2}\times\cdots T_j\times\cdots T_n \end{aligned}\tag{11}BAT′=Tm×Tm−1×⋯Ti×⋯T1×BAT×T1×T2×⋯Tj×⋯Tn(11)
六、改进D H \bf DHDH法
6.1 D H \bf DHDH定义与建模
DH法:Denavit-Hartenberg法
改进DH建模:
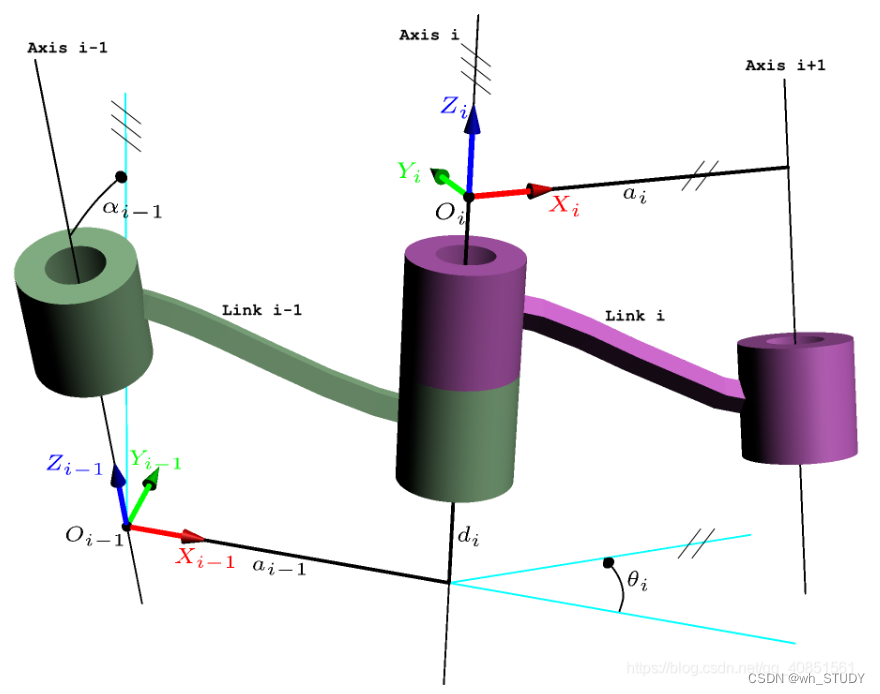
上述各个量分别为:
- a i − 1 a_{i-1}ai−1:连杆长度(L i n k l e n g t h Link\ lengthLink length),沿着X → i − 1 \overrightarrow{X}_{i-1}Xi−1,从Z → i − 1 \overrightarrow{Z}_{i-1}Zi−1移动到Z → i \overrightarrow{Z}_{i}Zi的距离;
- α i − 1 \alpha_{i-1}αi−1:连杆转角(L i n k t w i s t Link\ twistLink twist),绕着X → i − 1 \overrightarrow{X}_{i-1}Xi−1,从Z → i − 1 \overrightarrow{Z}_{i-1}Zi−1移动到Z → i \overrightarrow{Z}_{i}Zi的距离;
- d i d_idi:连杆偏距(L i n k o f f s e t Link\ offsetLink offset),沿着Z → i \overrightarrow{Z}_{i}Zi,从X → i − 1 \overrightarrow{X}_{i-1}Xi−1移动到X → i \overrightarrow{X}_{i}Xi的距离;
- θ i \theta_iθi:关节角(J o i n t a n g l e Joint\ angleJoint angle),绕着Z → i \overrightarrow{Z}_{i}Zi,从X → i − 1 \overrightarrow{X}_{i-1}Xi−1移动到X → i \overrightarrow{X}_{i}Xi的距离;
改进DH法建模步骤:
- 确定每个轴的方向和相邻轴之间的公共法线;
- 将轴与公共法线的交点当做所在坐标系的原点;
- 将轴的方向确定为Z → i \overrightarrow{Z}_iZi,将轴Z → i \overrightarrow{Z}_iZi与轴Z → i + 1 \overrightarrow{Z}_{i+1}Zi+1之间公共法线确定为X → i \overrightarrow{X}_iXi;
- 根据尽可能将参数设置为0的原则,确定坐标系{ 0 } \{0\}{0}的X → 0 \overrightarrow{X}_0X0和坐标系{ n } \{n\}{n}的X → n \overrightarrow{X}_nXn;
- 根据X → i \overrightarrow{X}_iXi和Z → i \overrightarrow{Z}_iZi,利用右手定则确定Y → i \overrightarrow{Y}_iYi
- 将参数填入DH表中
DH表格式:
| L i n k i Link\ iLink i | α i − 1 \alpha_{i-1}αi−1 | a i − 1 a_{i-1}ai−1 | d i d_idi | θ i \theta_iθi |
|---|---|---|---|---|
| ⋮ \vdots⋮ | ⋮ \vdots⋮ | ⋮ \vdots⋮ | ⋮ \vdots⋮ | ⋮ \vdots⋮ |
6.2 改进D H \bf DHDH法下的齐次变换矩阵
显然,DH法下的齐次变换矩阵是从坐标系{ i − 1 } \{i-1\}{i−1}到坐标系{ i } \{i\}{i},且一切运动都是相对于相对坐标系进行,因此齐次变换矩阵i − 1 T i ^{i-1}T_{i}i−1Ti:
i − 1 T i = R X ( α i − 1 ) × D X ( a i − 1 ) × R Z ( θ i ) × D Z ( d i ) = [ 1 0 0 0 0 cos α i − 1 − sin α i − 1 0 0 sin α i − 1 cos α i − 1 0 0 0 0 1 ] × [ 1 0 0 a i − 1 0 1 0 0 0 0 1 0 0 0 0 1 ] × [ cos θ i − sin θ i 0 0 sin θ i cos θ i 0 0 0 0 1 0 0 0 0 1 ] × [ 1 0 0 0 0 1 0 0 0 0 1 d i 0 0 0 1 ] = [ c θ i − s θ i 0 a i − 1 s θ i c α i − 1 c θ i c α i − 1 − s α i − 1 − s α i − 1 d i s θ i s α i − 1 c θ i s α i − 1 c α i − 1 c α i − 1 d i 0 0 0 1 ] \begin{aligned} ^{i-1}T_i&=R_X(\alpha_{i-1})\times D_X(a_{i-1})\times R_Z(\theta_i)\times D_Z(d_i)\\ &=\left[\begin{matrix}1&0&0&0\\0&\cos\alpha_{i-1}&-\sin\alpha_{i-1}&0\\ 0&\sin\alpha_{i-1}&\cos\alpha_{i-1}&0\\0&0&0&1\end{matrix}\right]\times \left[\begin{matrix}1&0&0&a_{i-1}\\0&1&0&0\\ 0&0&1&0\\0&0&0&1\end{matrix}\right]\times \left[\begin{matrix}\cos\theta_i&-\sin\theta_i&0&0\\\sin\theta_i&\cos\theta_i&0&0\\ 0&0&1&0\\0&0&0&1\end{matrix}\right]\times \left[\begin{matrix}1&0&0&0\\0&1&0&0\\ 0&0&1&d_{i}\\0&0&0&1\end{matrix}\right]\\ &=\left[\begin{matrix}c\theta_i&-s\theta_i&0&a_{i-1}\\ s\theta_ic\alpha_{i-1}&c\theta_ic\alpha_{i-1}&-s\alpha_{i-1}&-s\alpha_{i-1}d_i\\ s\theta_is\alpha_{i-1}&c\theta_is\alpha_{i-1}&c\alpha_{i-1}&c\alpha_{i-1}d_i\\ 0&0&0&1 \end{matrix}\right] \end{aligned}i−1Ti=RX(αi−1)×DX(ai−1)×RZ(θi)×DZ(di)=⎣⎡10000cosαi−1sinαi−100−sinαi−1cosαi−100001⎦⎤×⎣⎡100001000010ai−1001⎦⎤×⎣⎡cosθisinθi00−sinθicosθi0000100001⎦⎤×⎣⎡10000100001000di1⎦⎤=⎣⎡cθisθicαi−1sθisαi−10−sθicθicαi−1cθisαi−100−sαi−1cαi−10ai−1−sαi−1dicαi−1di1⎦⎤
因此,对于整个机械臂系统来说,坐标系{ i } \{i\}{i}相对于坐标系{ 0 } \{0\}{0}的齐次变换矩阵为:
0 T i = 0 T 1 1 T 2 ⋯ i − 1 T i , i ∈ { 1 , 2 , 3 , ⋯ , n } (12) ^0T_i=^0T_1\ ^1T_2\cdots^{i-1}T_i\ ,i\in\{1,2,3,\cdots,n\}\tag{12}0Ti=0T1 1T2⋯i−1Ti ,i∈{1,2,3,⋯,n}(12)
6.3 工具箱T o o l b o x \bf ToolboxToolbox的部分使用
- 安装Toolbox
将下载的文件夹放置进Matlab的安装路径下
将文件夹中的r v c t o o l s rvctoolsrvctools文件夹加入到路径中

打开Matlab,在命令行中运行startup_rvc,然后再运行rtbdemo

toolbox关于正运动学的基本使用
该工具箱与理论的吻合例证
设置:θ = π / 8 ; d = 3.5 ; a = 4.7 ; α = − 3 π / 7 \theta=\pi/8;d=3.5;a=4.7;\alpha=-3\pi/7θ=π/8;d=3.5;a=4.7;α=−3π/7
例证如下:
theta=pi/8;d=3.5;a=4.7;alpha=-3*pi/7;
T1=[cos(theta) -sin(theta) 0 a;
sin(theta)*cos(alpha) cos(theta)*cos(alpha) -sin(alpha) -sin(alpha)*d;
sin(theta)*sin(alpha) cos(theta)*sin(alpha) cos(alpha) cos(alpha)*d;
0 0 0 1];
L=Link([theta,d,a,alpha 0],'modified');%0代表旋转关节
T2=L.A(theta)
T1-T2

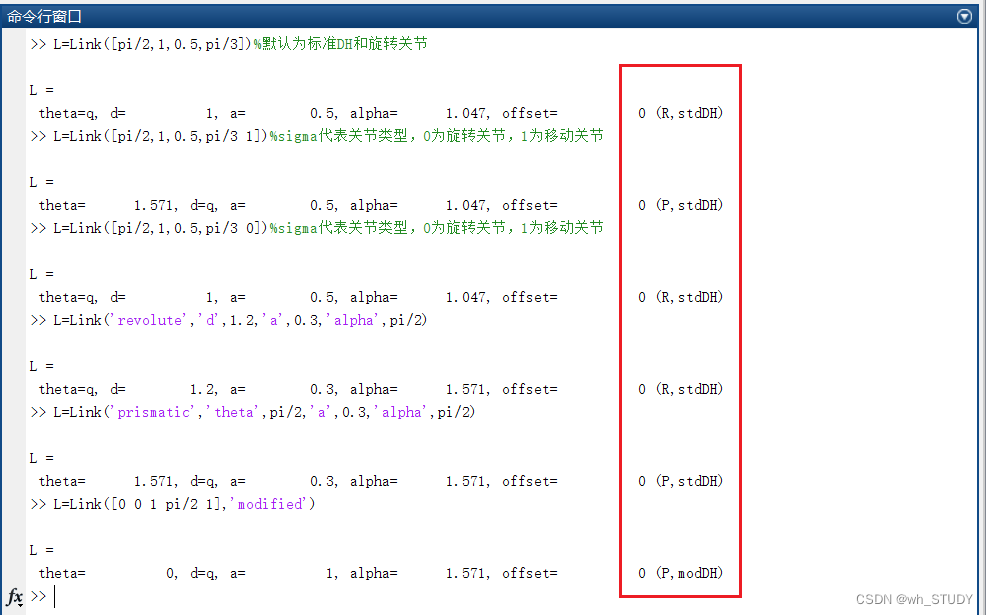
创建L i n k LinkLink
L=Link([theta,d,a,alpha])%默认为标准DH和旋转关节
L=Link([theta,d,a,alpha,sigma])%sigma代表关节类型,0为旋转关节,1为移动关节
%也可通过外文注明来确定关节类型
L=Link('revolute','d',1.2,'a',0.3,'alpha',pi/2)
L=Link('prismatic','theta',pi/2,'a',0.3,'alpha',pi/2)
%若要使用改进DH法,则可通过下列方式
L=Link([0 0 1 pi/2 1],'modified')
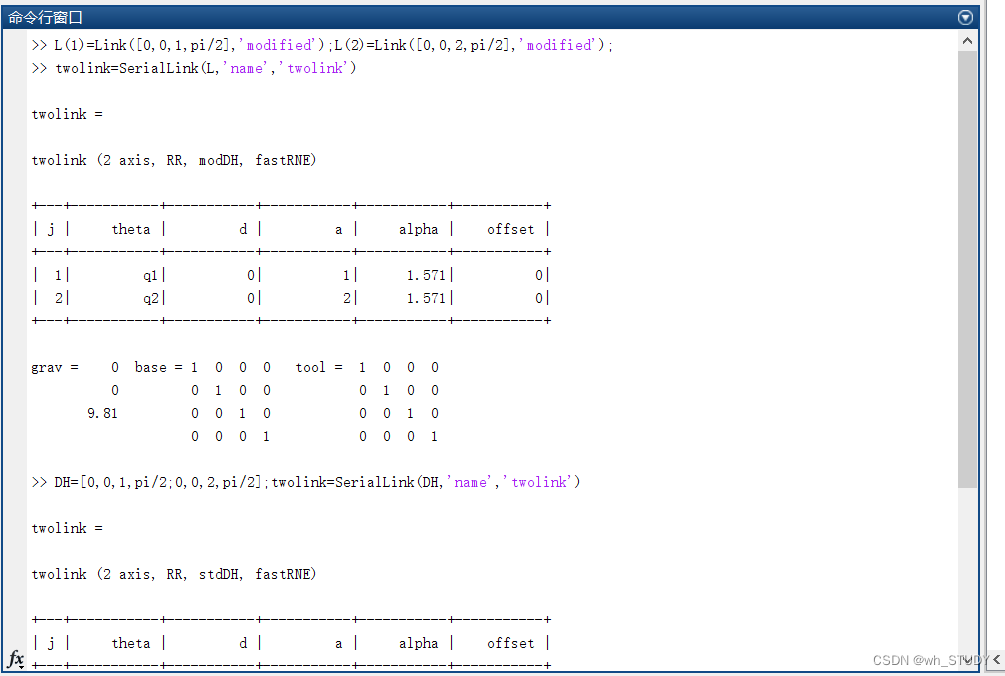
连接L i n k s LinksLinks
%方法1
L(1)=Link([0,0,1,pi/2],'modified');L(2)=Link([0,0,2,pi/2],'modified');
twolink=SerialLink(L,'name','twolink')
%方法2
DH=[0,0,1,pi/2;0,0,2,pi/2];twolink=SerialLink(DH,'name','twolink')
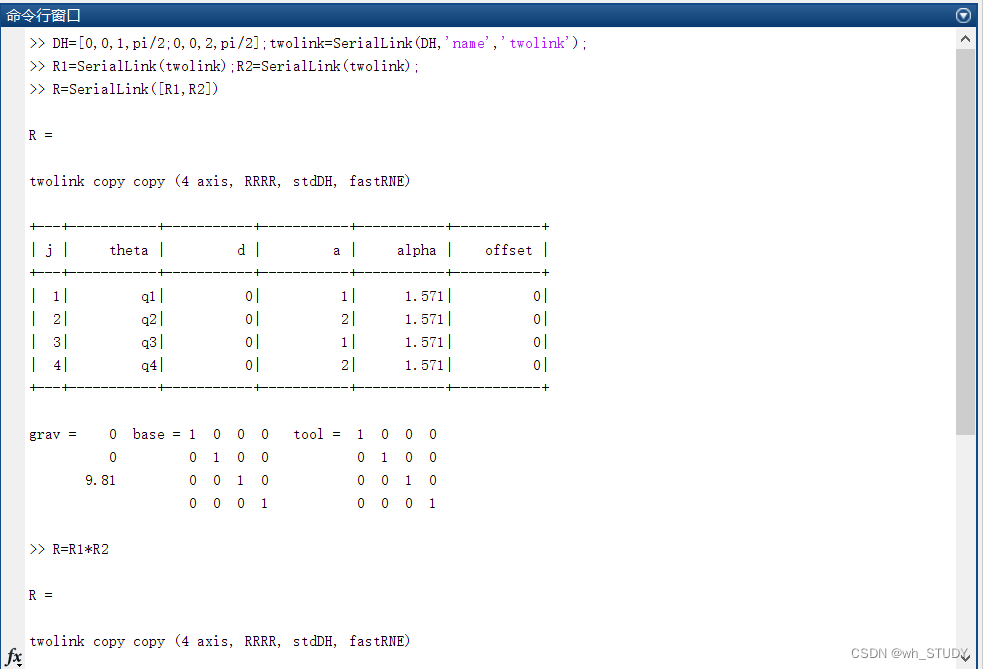
连接R o b o t RobotRobot
DH=[0,0,1,pi/2;0,0,2,pi/2];twolink=SerialLink(DH,'name','twolink');
R1=SerialLink(twolink);R2=SerialLink(twolink);
%方法1
R=SerialLink([R1,R2])
%方法2
R=R1*R2
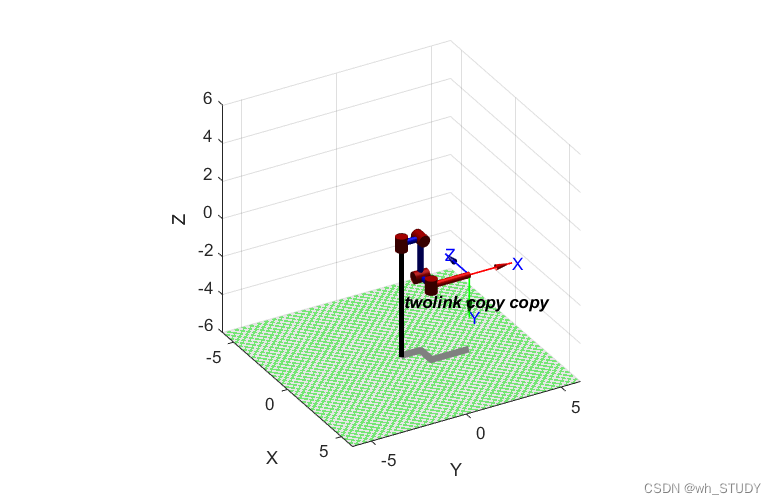
模型作图
DH=[0,0,1,pi/2;0,0,2,pi/2];twolink=SerialLink(DH,'name','twolink');
R1=SerialLink(twolink);R2=SerialLink(twolink);
R=SerialLink([R1,R2]);
R.plot([pi/2,-pi/2,pi/2,-pi/2])
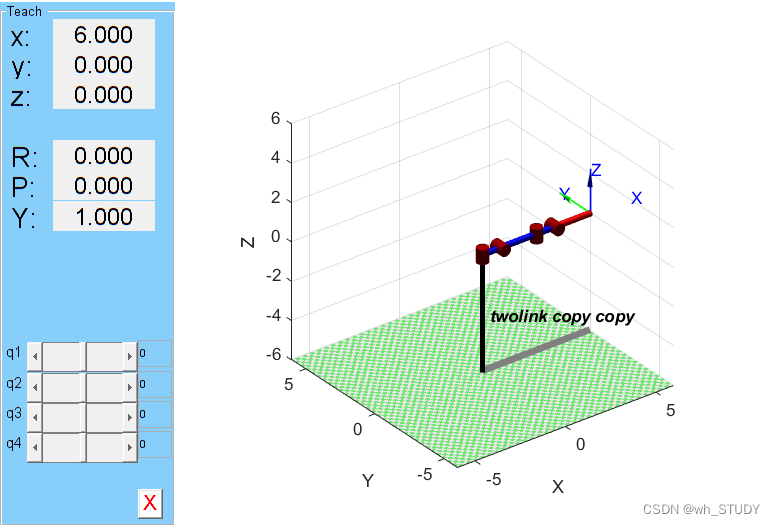
改参作图
DH=[0,0,1,pi/2;0,0,2,pi/2];twolink=SerialLink(DH,'name','twolink');
R1=SerialLink(twolink);R2=SerialLink(twolink);
R=SerialLink([R1,R2]);
R.teach()
6.4 一个简单例子
为了检验学习效果,我将提供一个简单例子,该例子为六自由度驱动机器人,表示如下:
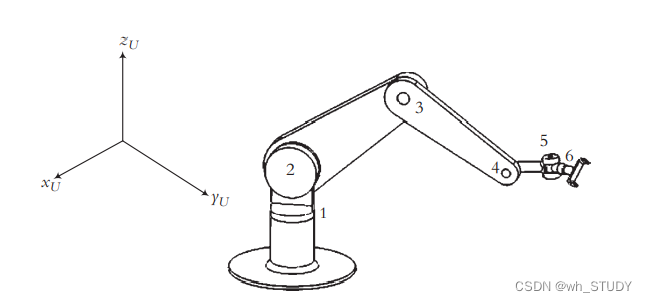
我们对其DH建模,首先对各个坐标系进行标定:
DH表:
| # | θ \thetaθ | d dd | a aa | α \alphaα |
|---|---|---|---|---|
| 0—1 | θ 1 \theta_1θ1 | 0 | 0 | 0° |
| 1—2 | θ 2 \theta_2θ2 | 0 | 0 00 | 90° |
| 2—3 | θ 3 \theta_3θ3 | 0 | a 2 a_2a2 | 0° |
| 3—4 | θ 4 \theta_4θ4 | 0 | a 3 a_3a3 | 0° |
| 4—5 | θ 5 \theta_5θ5 | 0 | a 4 a_4a4 | -90° |
| 5—6 | θ 6 \theta_6θ6 | 0 | 0 00 | 90° |
因此我们可以得到相邻坐标系的齐次变换矩阵:
0 T 1 = [ c θ 1 − s θ 1 0 0 s θ 1 c θ 1 0 0 0 0 1 0 0 0 0 1 ] , 1 T 2 = [ c θ 2 − s θ 2 0 0 0 0 − 1 0 s θ 2 c θ 2 0 0 0 0 0 1 ] , 2 T 3 = [ c θ 3 − s θ 3 0 a 2 s θ 3 c θ 3 0 0 0 0 1 0 0 0 0 1 ] , 3 T 4 = [ c θ 4 − s θ 4 0 a 3 s θ 4 c θ 4 0 0 0 0 1 0 0 0 0 1 ] , 4 T 5 = [ c θ 5 − s θ 5 0 a 4 0 0 1 0 − s θ 5 − c θ 5 0 0 0 0 0 1 ] , 5 T 6 = [ c θ 5 − s θ 5 0 0 0 0 − 1 0 s θ 5 c θ 5 0 0 0 0 0 1 ] \begin{aligned} &^0T_1=\left[\begin{matrix}c\theta_1&-s\theta_1&0&0\\ s\theta_1&c\theta_1&0&0\\ 0&0&1&0\\ 0&0&0&1\end{matrix}\right],^1T_2=\left[\begin{matrix}c\theta_2&-s\theta_2&0&0\\0&0&-1&0\\ s\theta_2&c\theta_2&0&0\\0&0&0&1\end{matrix}\right], ^2T_3=\left[\begin{matrix}c\theta_3&-s\theta_3&0&a_2\\ s\theta_3&c\theta_3&0&0\\ 0&0&1&0\\0&0&0&1\end{matrix}\right],\\ &^3T_4=\left[\begin{matrix}c\theta_4&-s\theta_4&0&a_3\\ s\theta_4&c\theta_4&0&0\\ 0&0&1&0\\0&0&0&1\end{matrix}\right],^4T_5=\left[\begin{matrix}c\theta_5&-s\theta_5&0&a_4\\0&0&1&0\\ -s\theta_5&-c\theta_5&0&0\\0&0&0&1\end{matrix}\right], ^5T_6=\left[\begin{matrix}c\theta_5&-s\theta_5&0&0\\0&0&-1&0\\ s\theta_5&c\theta_5&0&0\\0&0&0&1\end{matrix}\right] \end{aligned}0T1=⎣⎡cθ1sθ100−sθ1cθ10000100001⎦⎤,1T2=⎣⎡cθ20sθ20−sθ20cθ200−1000001⎦⎤,2T3=⎣⎡cθ3sθ300−sθ3cθ3000010a2001⎦⎤,3T4=⎣⎡cθ4sθ400−sθ4cθ4000010a3001⎦⎤,4T5=⎣⎡cθ50−sθ50−sθ50−cθ500100a4001⎦⎤,5T6=⎣⎡cθ50sθ50−sθ50cθ500−1000001⎦⎤
因此,该机器人的手(末端执行器)所在坐标系{ H } \{H\}{H}相对于机器人基座{ R } \{R\}{R}的齐次变换矩阵R T H ^RT_HRTH为:
R T H = 0 T 1 × 1 T 2 × 2 T 3 × 3 T 4 × 4 T 5 × 5 T 6 (13) ^RT_H=^0T_1\times^1T_2\times^2T_3\times^3T_4\times^4T_5\times^5T_6\tag{13}RTH=0T1×1T2×2T3×3T4×4T5×5T6(13)
七、下载资源
链接:百度网盘下载资源
提取码:noqa
参考目录
[1]Niku, Saeed B . Introduction to robotics : analysis, control, applications[J]. 2011.