这两天看了一下LADRC的。学习深度不够,从理论和原理,没法评论什么。从个人感受上,它会从另一种角度去解释一些的控制的东西。从工程使用上,还是很有参考价值的,参数意义比较明确,整定参数比较容易。
参考:
- 古典控制与低阶LADRC参数整定(https://www.bilibili.com/video/BV1UD4y117yB/?spm_id_from=333.999.0.0&vd_source=1f88f15c4a8c95c1d720fa4c6218bc54)
- https://zhuanlan.zhihu.com/p/585324684
一阶LADRC
一阶被控对象
y ˙ = b 0 u + f \dot{y}=b_0u+fy˙=b0u+f
扩张state-space:
{ x ˙ 1 = x 2 + b 0 u x ˙ 2 = f ˙ y = x 1 \left\{ \begin{array}{l} \dot{x}_1=x_2+b_0u\\ \dot{x}_2=\dot{f}\\ y=x_1\\ \end{array} \right.⎩⎨⎧x˙1=x2+b0ux˙2=f˙y=x1
LESO:
{ z ˙ 1 = β 1 ( y − z 1 ) + z 2 + b 0 u z ˙ 2 = β 2 ( y − z 1 ) \left\{ \begin{array}{l} \dot{z}_1=\beta_1 (y-z_1)+z_2+b_0u \\ \dot{z}_2=\beta_2(y-z_1)\\ \end{array} \right.{z˙1=β1(y−z1)+z2+b0uz˙2=β2(y−z1)
控制器:
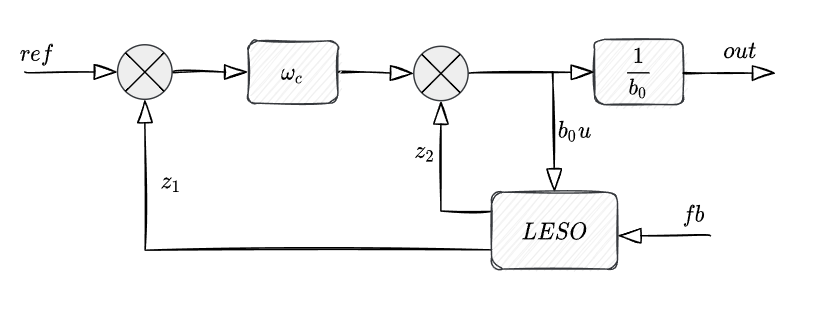
u = 1 b 0 [ l 1 ( r e f − z 1 ) − z 2 ] u=\frac{1}{b_0}[l_1(ref-z_1)-z_2]u=b01[l1(ref−z1)−z2]
其中
l 1 = ω c , β 1 = 2 ω o , β 2 = ω o 2 l_1=\omega_c, \beta_1=2\omega_o, \beta_2=\omega_o^2l1=ωc,β1=2ωo,β2=ωo2
ω c \omega_cωc是控制器带宽,ω o \omega_oωo是观测器带宽。一般选取ω o = 2 − 10 ω c \omega_o = 2-10\omega_cωo=2−10ωc。b 0 b_0b0跟系统的一些参数有关。
其框图结构:
代码实现:
代码实现也很简单,计算量很小。放mcu上,再简单优化一下,也就只比PI多几个乘法和加法。
hpp:
/**
* @copyright Copyright wangchongwei
* @license: GNU GPLv2
* @brief: adrc 1st
* @date 2023.03.05
* @changelog:
* date author notes
* 2023.03.05 wangchongwei create file
**/
#ifndef _LADRC_1ST_H_
#define _LADRC_1ST_H_
class LADRC_1st
{
public:
LADRC_1st(/* args */);
~LADRC_1st();
void setCtrlParm(double wc, double wo, double b0,double ts);
void setClampParm(double out_up, double out_low);
void reset(void);
double ladrc_1st(double ref,double fb);
private:
double ts;
double wc;
double wo;
double b0;
double out_up;
double out_low;
double out;
// observer
double z[2];
double dz[2];
};
#endif
cpp:
void LADRC_1st::setCtrlParm(double wc, double wo, double b0,double ts)
{
this->b0 = b0;
this->wc = wc;
this->wo = wo;
this->ts = ts;
}
void LADRC_1st::setClampParm(double out_up, double out_low)
{
this->out_up = out_up;
this->out_low = out_low;
}
double LADRC_1st::ladrc_1st(double ref,double fb)
{
// leso
dz[0] = 2*wo*(fb-z[0])+z[1]+b0*out;
dz[1] = wo*wo*(fb-z[0]);
z[0] += ts*dz[0];
z[1] += ts*dz[1];
// controller
out = (wc*(ref-z[0])-z[1])/b0;
if (out > out_up) out = out_up;
if (out < out_low) out = out_low;
return out;
}
github地址:
https://github.com/chongweiwang/CtrlSim/tree/main/lib/controller/adrc