三维激光扫描技术又被称为实景复制技术,是测绘领域继GPS技术之后的一次技术革命。它突破了传统的单点测量方法,具有高效率、高精度的独特优势。三维激光扫描技术能够提供扫描物体表面的三维点云数据,可以用于建立高精度高分辨率的地形、建筑物、构筑物数字模型。

1、三维激光扫描仪介绍 三维激光扫描技术是上世纪九十年代中期开始出现的一项高新技术,是继GPS空间定位系统之后又一项测绘技术新突破。 它具有三维测量和快速扫描两项基本功能,通过高速激光扫描测量的方法,大面积高分辨率地快速获取被测对象表面的三维坐标数据。 它突破了传统的单点测量方法,具有高效率、高精度的独特优势,可以快速、大量的采集空间点位信息,为快速建立物体的三维影像模型提供了一种全新的技术手段。 三维激光扫描仪具有快速性、不接触性、实时、动态、主动性、高密度、高精度,数字化、自动化等特性。
2 、技术原理 三维激光扫描系统主要有三维激光扫描仪、计算机、电源供电系统、支架及配套软件构成。 三维激光扫描仪作为系统的主要组成部分之一,又由激光发射器、接收器、时间计数器、马达控制可旋转的滤光镜、控制电路板、微电脑、 CCD相机以及软件等组成。 激光测距技术是三维激光扫描仪的主要技术之一,激光测距的原理主要是基于脉冲测距法、相位测距法、激光三角法、脉冲-相位式四种类型。 目前测绘领域所使用的三维激光扫描仪主要是脉冲测距法和相位测距法。
三维激光扫描仪主要由测距系统和测角系统以及其他的辅助系统构成,如内置相机以及双轴补偿器等。工作原理是通过测距系统获取扫描仪到待测物体的距离,通过测角系统获取扫描仪至待测物体的水平角和竖直角,进而计算出待测物体的三维坐标信息。在扫描的过程中利用本身垂直和水平马达等传动装置完成对物体的全方位扫描,这样连续对空间以一定的取样密度进行扫描测量,就能得到被测目标物体密集的三维彩色散点数据,成为点云。 3、基本功能 (1)三维测量 三维激光扫描仪具有实时三维坐标获取能力,与传统测量全站仪、GPS所测数据不同,在逐步数字化的今天,三维已经逐渐的代替二维,因为其直观是二维无法表示的,三维激光扫描仪每次测量的数据不仅包含X,Y,Z点的信息,还包括R,G,B颜色信息、物体 反色 率等信息,这样全面的信息能给人一种物体在电脑里真实再现的感觉,是一般测量手段无法做到的。 (2)快速扫描
三维激光扫描仪可以实时获取高密度大量点云数据,具有快速、实时、非接触等优点。在常规测量手段里,每一点的测量费时都在2-5秒,该测量速度较慢,已经不能满足需求,目前新一代三维激光扫描仪最大速度已经达到1,000,000点/秒,这是三维激光扫描仪对物体详细描述的基本保证,古建筑物,工厂管道,隧道,地形等复杂的领域无法测量已经成为过去式。
4 、应用领域 三维 激光扫描仪已经成功的在文物保护、城市建筑测量、地形测绘、采矿业、变形监测、工厂、大型结构、管道设计、飞机船舶制造、公路铁路建设、隧道工程、桥梁改建等领域里得到广泛应用。 ( 1)地铁、市政、土木等基础设施扫描 基础设施的测量手段正从传统的单点测量方式向激光扫描方式过渡,三维激光扫描仪集高效率和高性能于一身,测量级的精度,一体化的数据处理流程,提供完整的三维激光扫描解决方案。 ( 2)工厂、石化、船舶等数字化管理和改造 三维激光扫描仪可快速获取丰富点云数据和高清晰图像,数据可无缝导入到专业设计软件中进行建模、设计、制图和检测,有些专用后处理软件可利用点云进行逆向建模,快速进行工厂数字化。 ( 3)安装、室内装修、 BIM等建筑扫描 对于建筑施工、安装、装修和竣工验收,三维激光扫描仪可贯穿于整个建筑的生命周期,记录和控制建设各个环节,利用后处理软件可无缝结合 BIM,无需在施工现场即可跟踪了解项目情况,确保工程质量,从而避免了重复劳动的成本花费以及工期的延误。
5 、三维激光扫描仪在隧道中的应用 为了获取高精度的完整的点云数据,工程过程中一般包括项目计划定制、外业数据采集、内业数据处理、数据分析和 质量控制。
(1)采集方案 扫描项目确定后,实施技术负责人应仔细了解工程需求,为保证技术设计的合理性并能顺利实施,需确认工程现场情况和控制点情况。 根据扫描对象形态、空间分布、扫描精度、分辨率确认测站位置和扫描仪参数等。 ①扫描仪参数选择,扫描仪品牌较多,激光波长、数据采样率、最小点间距、测距精度、测距范围等指标各有不同,参数设计应注意最佳扫描距离、每站扫描区域、分辨率等指标。 ②测站布设选择,扫描仪在扫描过程中可以设站建立与项目工程匹配的绝对坐标系统,在无特殊要求时能满足项目需求。 为了保证测站精度,需要注意现场测量控制网布设,测站距离控制点过远或控制点夹角过小等都会引起测站精度降低,从而影响整个测站点云精度。
(2)获取点云数据 扫描开始前需要做好相关准备工作,主要包括仪器、人员、交通、后勤保障、测量控制点布设等。 针对不同设备在一个测站上具体的扫描操作方法会有所不同。 一个测站上扫描的基本步骤为: ①仪器整平 仪器开机,整平。 ②仪器设站 设站方式一般有: 已知方位角、已知后视点以及后方交会等方法,可以轻松的将扫描仪架设在任意位置,通过后方交会的方式实现高精度的不同测站的绝对坐标数据采集,确保获取高质量的扫描成果。 ③ 参数设置 当确认仪器设站成功后,启动扫描模块进行扫描参数的设置,主要包括测站号、扫描范围、分辨率等相关参数设置。 其中与精度相关参数设置要与项目技术设计相符,目前主流的扫描仪设置基本上都是这几个参数设置,总体比较简单。
④开始扫描 当确认仪器参数设置正确后,可以执行扫描操作。 仪器在扫描过程中会有扫描进度显示,完成扫描剩余的时间,如果有问题可以暂停或者取消扫描。 当仪器扫描结束后,可以检查扫描数据质量,不合格的需要重新扫描。 如有人员走动造成局部区域遮挡或有问题区域,可以在扫描仪上进行局部点测量,保证数据的准确性完整性。 为了保证后续工作顺利完成,在测站上应做好观测纪录,主要内容包括扫描位置、有效范围(一般取半径50米)、扫描时间、扫描操作人、测站编号、参数设置等。 ⑤换站扫描 当确认测站相关工作完成无误后,可以将仪器般到下一测站, 重复上述4个步骤的工作, 注意与前一个测站需要相同的工程文件名称、分辨率等特殊指标参数的设置。 ⑥数据输出 当全部扫描完成工作后,依据数据文件大小,如果项目工程需要可在现场导出数据文件,导入SD卡/U盘,进行相关数据导出。 ⑦结束扫描工作 当数据传输完成后,关闭仪器, 整理相关部件,仪器马达停止工作后取出电池装箱,可以结束扫描外业工作。
(3)点云数据预处理
①项目工程采集的原始点云,在对应厂家的自带软件进行点云预处理格式转换。以 Collage为例,在此项目中主要进行点云数据的读取、点云拼接以及点云预处理工作。 Collage以数据库的形式对各个扫描任务进行独立管理,单个数据库软件显示界面可加载百亿级点云且不会出现卡顿的现象。 在此步骤的主要工作是创建以本次扫描内容为标题的数据库,然后将扫描的原始数据导入到Collage中。
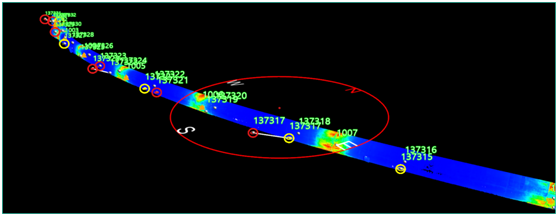
②数据去噪及导出。 点云配准完成后,自带真实绝对大地坐标系的海量数据。 软件对海量数据自动进行去噪处理,利用Collage对隧道数据进行优化,将同样位置的点云进行计算和自动过滤,最终以整体的方式得出一份数据质量好、噪声小、高精度数据。 点云预处理完成后,基于专业应用方向软件需求,将数据进行特定的格式导出。 点云常用的格式有:LAS、PTS、E57、XYZ、PCD等格式。
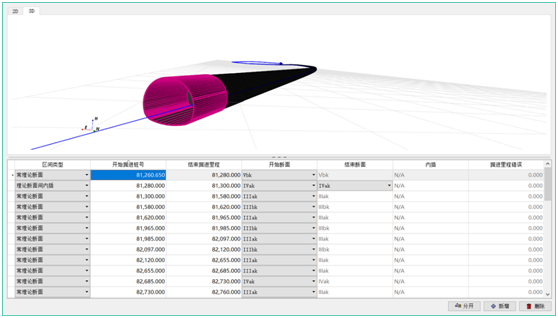
(4)超欠挖分析 针对不同的行业有不同专业的点云处理软件,目前国内施工隧道行业应用的比较多的是安伯格隧道超欠挖专业软件Amberg Tunnel。 该软件是专为隧道建设设计的、经过全球千余地下工程项目实践检验的隧道综合测量解决方案,支持各种隧道施工工法和施工阶段。 配合和引导高精度测量硬件设备,高效、精准完成各个施工阶段的测量作业任务,不但显著提高了数据采集和分析的效率、精度,而且在高密度扫描断面超欠挖分析、精细化开挖方量分析、衬砌厚度分析、岩土工程监测分析和隧道竣工资料存档等方面有优秀表现, 下面以Amberg Tunnel为例,简述隧道点云处理流程。 ①建立隧道模型 A.设计中线。 依据设计单位提供的平、竖曲线,在Amberg Tunnel软件中定义施工隧道(正洞、竖井)设计中线。 在软件里计算逐桩坐标,与设计单位提供的逐桩坐标相核对,保证设计数据的准确性。 B.施工阶段。 依据扫描的点云定义开挖、初支、二衬三个基本的施工阶段,导入不同施工阶段的设计理论断面,并定义不同等级围岩断面对应的里程信息,构建隧道设计模型。
②导入预处理点云数据 经过预处理的数据,导入的Amberg Tunnel软件中,自动定位出测站里程信息, 双击打开点云进行数据过滤,软件提供两种过滤模式: A.按照距离、里程过滤 现在三维激光扫描仪存在性能过剩,扫描半径一般几十米、几百米,在隧道超欠挖高精度应用方面,过远的距离会造成精度降低,目前行业默认隧道扫描有效半径不高于40米,软件提供按照距离半径、按照隧道里程一键式过滤冗余数据。
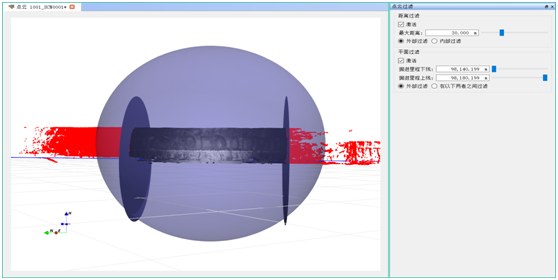
B.按照固定的分辨率过滤 按照固定的分辨率对点云进行抽稀过滤,降低采样分辨率,从而提高处理速度。 ③超欠挖分析计算 点云导入成功后下一步进行点云的分析处理,超欠挖分析。 ★过滤距离理论施工阶段设计模型一定距离的-内部点(风管/台车/拱架等)。 ★过滤距离理论施工阶段设计模型一定距离的-外部点(避险洞等), 例如,单站有效里程长度80米,配备专业电脑,超欠挖分析计算时间5分钟。
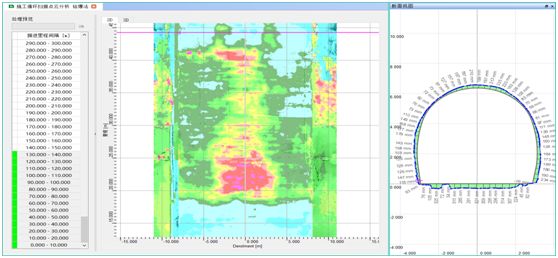
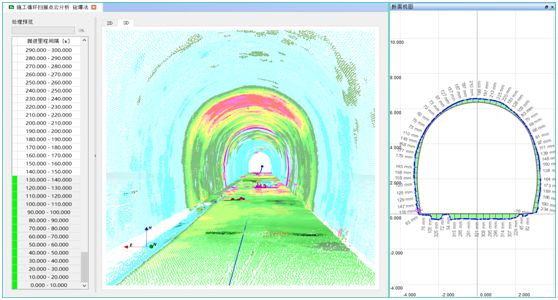
④3D视图
软件界面可以实时的显示鼠标任意位置断面的超欠挖信息,同时用不同的颜色区分隧道超欠挖分部情况。
(5)质量控制措施 在隧道钻爆法施工中,隧道超挖或者欠挖是不可避免的, 但在实际施工中,部分项目对超挖、欠挖的认识不够,以至于开挖成型质量较差,其不仅对隧道施工的工程质量和安全进度产生重要的影响,而且会影响工程的经济效益,所以隧道超欠挖问题必须引起重视。

隧道施工源于成本控制,三维扫描测量系统主要应用于开挖超欠挖控制、初喷方量控制、初喷不平整度控制、二衬净空验收三个阶段。
根据显示颜色和超欠挖数据,查找超欠挖区域。对于超挖地段,向施工工程师提交资料,分析围岩情况和炮眼布设间距,可建议下循环技术交底中调整外插角和装药量,直至超挖量满足要求。对于欠挖地段通知当班的施工作业人员及时处理,以免后期费工费时。
拟稿:邢庭松、杨翻
校核:杜志刚


你若喜欢,点个在看