 sart@sart-Lenovo-S41-70:~$ roslaunch gazebotest my_move_roboot.launch
sart@sart-Lenovo-S41-70:~$ roslaunch gazebotest my_move_roboot.launch
… logging to /home/sart/.ros/log/b1b1351e-dd7f-11ea-b1aa-54ee75633e82/roslaunch-sart-Lenovo-S41-70-9065.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Traceback (most recent call last):
File “/opt/ros/indigo/share/xacro/xacro.py”, line 62, in
xacro.main()
AttributeError: ‘module’ object has no attribute ‘main’
Invalid tag: Cannot load command parameter [robot_description]: command [/opt/ros/indigo/share/xacro/xacro.py ‘/home/sart/catkin_ws/src/gazebotest/src/gazebotest/urdf/my_move_robot.xacro’] returned with code [1].
Param xml is
The traceback for the exception was written to the log file
sart@sart-Lenovo-S41-70:~/catkin_ws$ cd …
sart@sart-Lenovo-S41-70:~$ xacro
Usage: xacro [options]
xacro: error: expected exactly one input file as argument
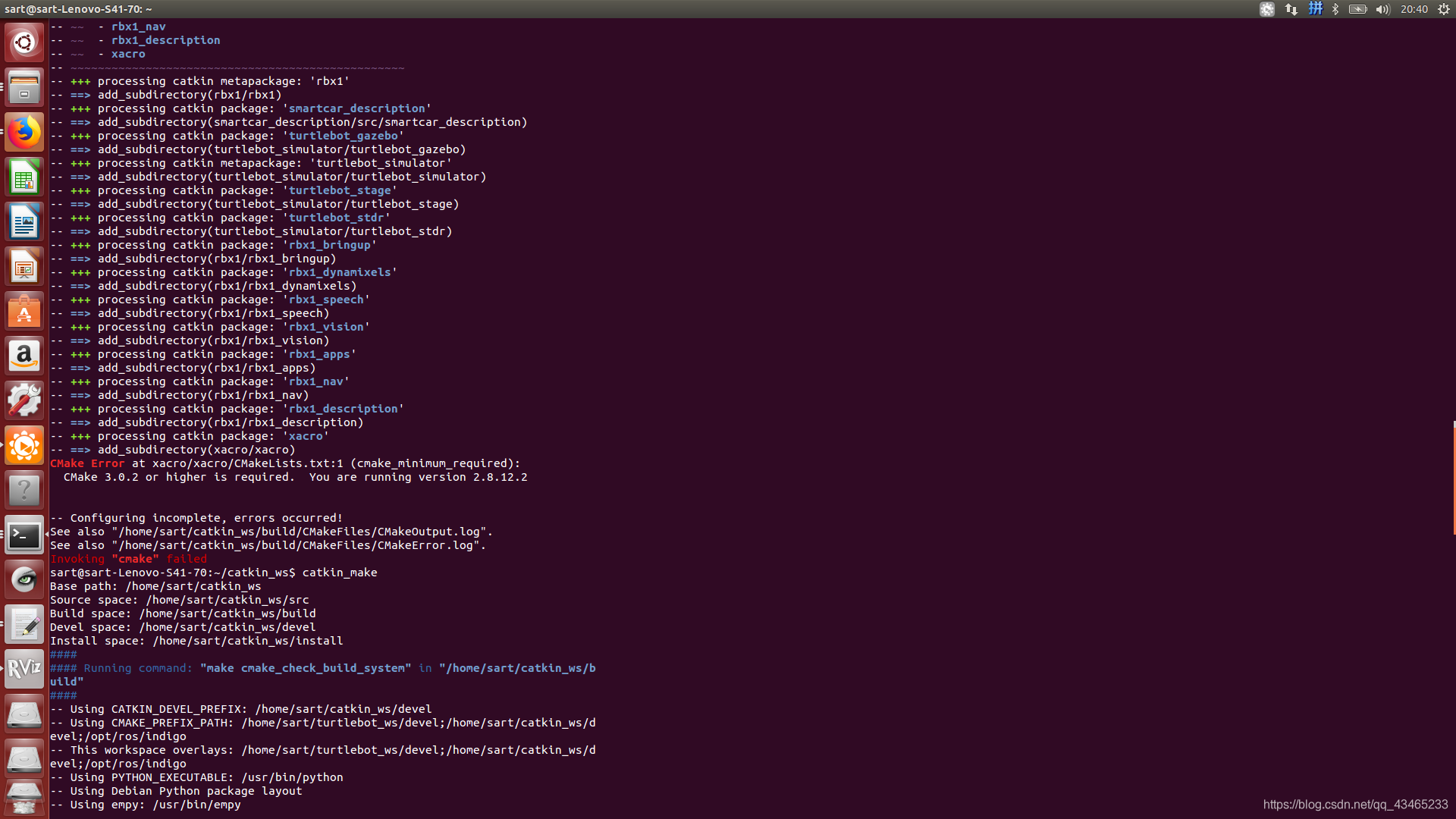
最简单的就是将该文件目录删除后在新建、编译,再次报错的话按照以下步骤解决:
1.安装xacro文件
github地址:
https://github.com/ros/xacro/tree/kinetic-devel
http://wiki.ros.org/xacro
sart@sart-Lenovo-S41-70:~$ mkdir catkin_ws/src/xacro -p
sart@sart-Lenovo-S41-70:~$ cd catkin_ws/src/xacro
sart@sart-Lenovo-S41-70:~/catkin_ws/src/xacro$ git clone https://github.com/ros/xacro.git
正克隆到 ‘xacro’…
remote: Enumerating objects: 77, done.
remote: Counting objects: 100% (77/77), done.
remote: Compressing objects: 100% (45/45), done.
remote: Total 2366 (delta 37), reused 56 (delta 25), pack-reused 2289
接收对象中: 100% (2366/2366), 776.40 KiB | 160.00 KiB/s, done.
处理 delta 中: 100% (1219/1219), done.
检查连接… 完成。
sart@sart-Lenovo-S41-70:~/catkin_ws/src/xacro$ cd …
sart@sart-Lenovo-S41-70:~/catkin_ws/src$ cd …
sart@sart-Lenovo-S41-70:~/catkin_ws$ source devel/setup.bash
输入xacro检查是否成功安装xacro文件:
sart@sart-Lenovo-S41-70:~$ xacro
Usage: xacro [options]
xacro: error: expected exactly one input file as argument