提取.bag文件中的图片数据
一、查询节点
查询所要解析的bag包的节点: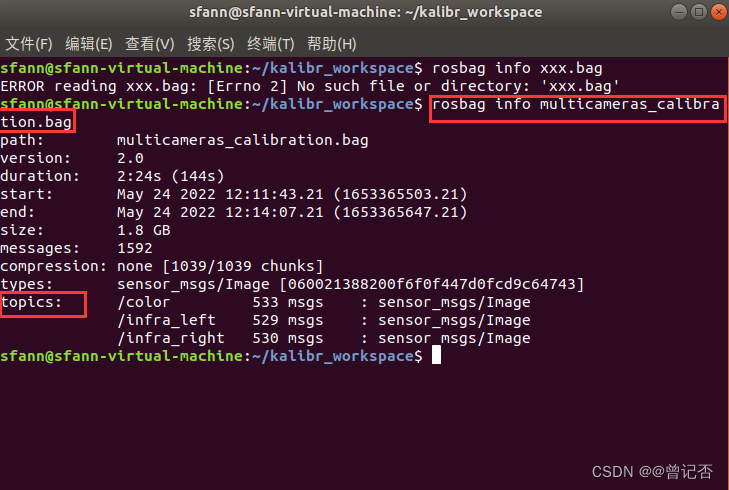
二、创建launch文件
创建export.launch文件,形式如下图所示:
<launch>
<node pkg="rosbag" type="play" name="rosbag" args="-d 2 $(find image_view)/test.bag"/>
<node name="extract" pkg="image_view" type="extract_images" respawn="false" output="screen" cwd="ROS_HOME">
<remap from="image" to="/camera/image_raw"/>
</node>
</launch>
修改待解析的bag包的绝对位置:
三、解析包
打开一个终端,运行
roscore
打开一个终端,cd到export.launch所在路径下,运行
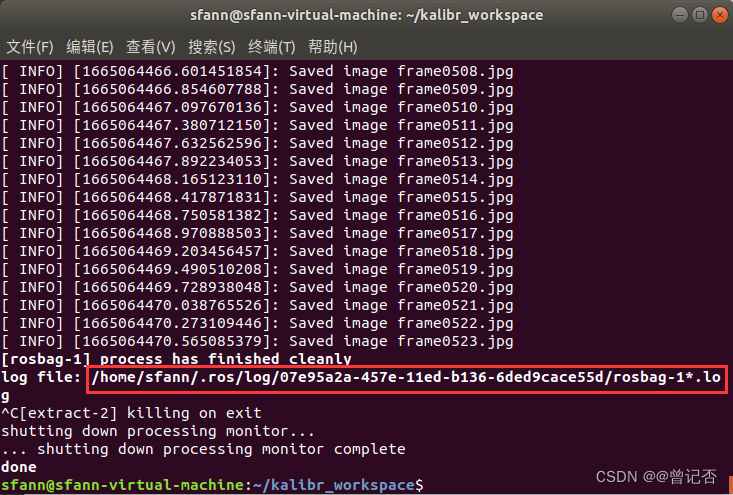
roslaunch export.launch
四、导出图片
cd ~
mkdir Example
mv ~/.ros/*.jpg ~/Example
参考文献
https://blog.csdn.net/weixin_34214500/article/details/94656521
http://wiki.ros.org/rosbag/Tutorials/Exporting%20image%20and%20video%20data
https://blog.csdn.net/weixin_42840360/article/details/119551054
版权声明:本文为qq_38364548原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。