1.安装rbx1
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git
cd ..
catkin_make
rospack profile2.安装Arbotix模拟器
cd ~/catkin_ws/src
git clone https://github.com/vanadiumlabs/arbotix_ros.git
cd ..
catkin_make3.测试模拟器
a.在一个新的终端输入roscore
b.在一个新的终端输入roslaunch rbx1_bringup fake_turtlebot.launch启动机器人
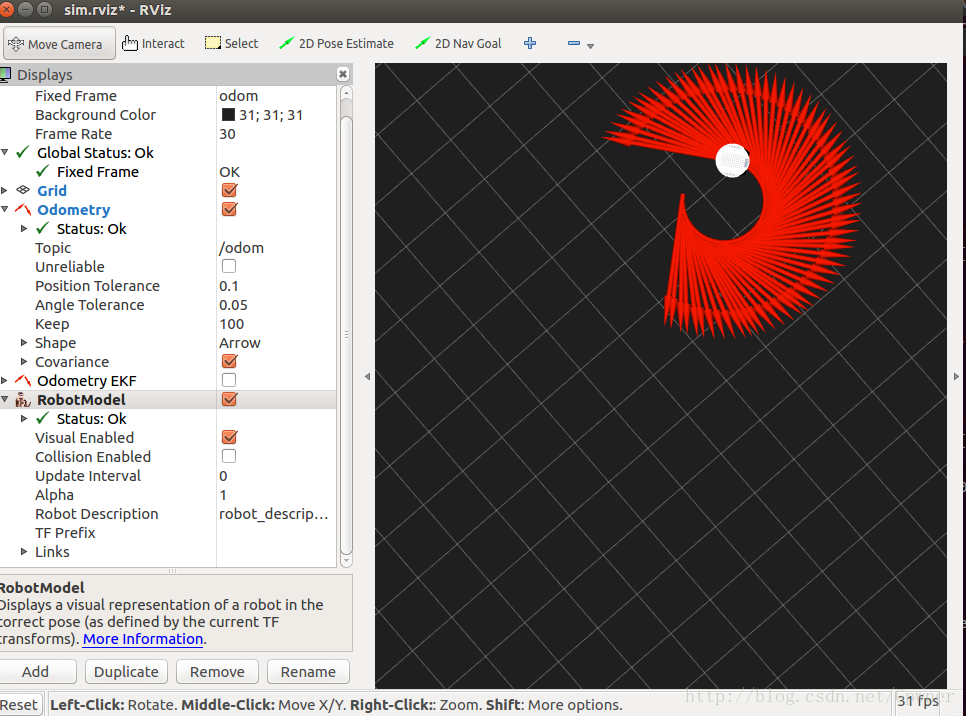
c.调出RViz查看模拟的机器人rosrun rviz rviz -drospack find rbx1_nav/sim.rviz
d.让机器人顺时针转圈rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.1,y: 0,z: 0},angular: {x: 0,y: 0,z: 0}}'(这里需要注意的是变量名和值之间必须要有一个空格)
e.ctrl+c终止终端,发送空的消息rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{}'
至此已经成功安装了模拟器
版权声明:本文为Gpwner原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。