目录
RTC也就是实时时钟,用于记录当前系统时间,对于Linux系统而言时间是非常重要的,就和我们
使用Windows电脑或手机查看时间一样,我们在使用Linux设备的时候也需要查看时间。本章我们
就来学习一下如何编写Linux下的RTC驱动程序。
1.Linux内核RTC驱动简介
RTC设备驱动是一个标准的字符设备驱动,应用程序通过open、release、read、write和ioctl等函
数完成对RTC设备的操作,关于RTC硬件原理部分我们已经在裸机篇中的第二十五章进行了详细的
讲解。
Linux内核将RTC设备抽象为rtc_device结构体,因此RTC设备驱动就是申请并初始化
rtc_device,最后将rtc_device注册到Linux内核里面,这样Linux内核就有一个RTC设备的。至于
RTC设备的操作肯定是用一个操作集合(结构体)来表示的,我们先来看一下rtc_device结构体,此
结构体定义在include/linux/rtc.h文件中,结构体内容如下(删除条件编译):
104 struct rtc_device
105 {
106 struct device dev; /* 设备 */
107 struct module *owner;
108
109 int id; /* ID */
110 char name[RTC_DEVICE_NAME_SIZE]; /* 名字 */
111
112 const struct rtc_class_ops *ops; /* RTC 设备底层操作函数 */
113 struct mutex ops_lock;
114
115 struct cdev char_dev; /* 字符设备 */
116 unsigned long flags;
117
118 unsigned long irq_data;
119 spinlock_t irq_lock;
120 wait_queue_head_t irq_queue;
121 struct fasync_struct *async_queue;
122
123 struct rtc_task *irq_task;
124 spinlock_t irq_task_lock;
125 int irq_freq;
126 int max_user_freq;
127
128 struct timerqueue_head timerqueue;
129 struct rtc_timer aie_timer;
130 struct rtc_timer uie_rtctimer;
131 struct hrtimer pie_timer; /* sub second exp, so needs hrtimer */
132 int pie_enabled;
133 struct work_struct irqwork;
134 /* Some hardware can't support UIE mode */
135 int uie_unsupported;
......
147 };我们需要重点关注的是ops成员变量,这是一个rtc_class_ops类型的指针变量,rtc_class_ops为
RTC设备的最底层操作函数集合,包括从RTC设备中读取时间、向RTC设备写入新的时间值等。
因此,rtc_class_ops是需要用户根据所使用的RTC设备编写的,此结构体定义在
include/linux/rtc.h文件中,内容如下:
71 struct rtc_class_ops {
72 int (*open)(struct device *);
73 void (*release)(struct device *);
74 int (*ioctl)(struct device *, unsigned int, unsigned long);
75 int (*read_time)(struct device *, struct rtc_time *);
76 int (*set_time)(struct device *, struct rtc_time *);
77 int (*read_alarm)(struct device *, struct rtc_wkalrm *);
78 int (*set_alarm)(struct device *, struct rtc_wkalrm *);
79 int (*proc)(struct device *, struct seq_file *);
80 int (*set_mmss64)(struct device *, time64_t secs);
81 int (*set_mmss)(struct device *, unsigned long secs);
82 int (*read_callback)(struct device *, int data);
83 int (*alarm_irq_enable)(struct device *, unsigned int enabled);
84 };看名字就知道rtc_class_ops操作集合中的这些函数是做什么的了,但是我们要注意,
rtc_class_ops中的这些函数只是最底层的RTC设备操作函数,并不是提供给应用层的
file_operations函数操作集。RTC是个字符设备,那么肯定有字符设备的file_operations函数操作
集,Linux内核提供了一个RTC通用字符设备驱动文件,文件名为drivers/rtc/rtc-dev.c,rtc-dev.c文
件提供了所有RTC设备共用的file_operations函数操作集,如下所示:
448 static const struct file_operations rtc_dev_fops = {
449 .owner = THIS_MODULE,
450 .llseek = no_llseek,
451 .read = rtc_dev_read,
452 .poll = rtc_dev_poll,
453 .unlocked_ioctl = rtc_dev_ioctl,
454 .open = rtc_dev_open,
455 .release = rtc_dev_release,
456 .fasync = rtc_dev_fasync,
457 };看到以上代码是不是很熟悉了,标准的字符设备操作集。应用程序可以通过ioctl函数来设置/读取
时间、设置/读取闹钟的操作,那么对应的rtc_dev_ioctl函数就会执行,rtc_dev_ioctl最终会通过
操作rtc_class_ops中的read_time、set_time等函数来对具体RTC设备的读写操作。我们简单来看一下rtc_dev_ioctl函数,函数内容如下(有省略):
218 static long rtc_dev_ioctl(struct file *file,
219 unsigned int cmd, unsigned long arg)
220 {
221 int err = 0;
222 struct rtc_device *rtc = file->private_data;
223 const struct rtc_class_ops *ops = rtc->ops;
224 struct rtc_time tm;
225 struct rtc_wkalrm alarm;
226 void __user *uarg = (void __user *) arg;
227
228 err = mutex_lock_interruptible(&rtc->ops_lock);
229 if (err)
230 return err;
......
269 switch (cmd) {
......
333 case RTC_RD_TIME: /* 读取时间 */
334 mutex_unlock(&rtc->ops_lock);
335
336 err = rtc_read_time(rtc, &tm);
337 if (err < 0)
338 return err;
339
340 if (copy_to_user(uarg, &tm, sizeof(tm)))
341 err = -EFAULT;
342 return err;
343
344 case RTC_SET_TIME: /* 设置时间 */
345 mutex_unlock(&rtc->ops_lock);
346
347 if (copy_from_user(&tm, uarg, sizeof(tm)))
348 return -EFAULT;
349
350 return rtc_set_time(rtc, &tm);
......
401 default:
402 /* Finally try the driver's ioctl interface */
403 if (ops->ioctl) {
404 err = ops->ioctl(rtc->dev.parent, cmd, arg);
405 if (err == -ENOIOCTLCMD)
406 err = -ENOTTY;
407 } else
408 err = -ENOTTY;
409 break;
410 }
411
412 done:
413 mutex_unlock(&rtc->ops_lock);
414 return err;
415 }第333行,RTC_RD_TIME为时间读取命令。
第336行,如果是读取时间命令的话就调用rtc_read_time函数获取当前RTC时钟,rtc_read_time函
数,rtc_read_time会调用__rtc_read_time函数,__rtc_read_time函数内容如下:
23 static int __rtc_read_time(struct rtc_device *rtc,
struct rtc_time *tm)
24 {
25 int err;
26 if (!rtc->ops)
27 err = -ENODEV;
28 else if (!rtc->ops->read_time)
29 err = -EINVAL;
30 else {
31 memset(tm, 0, sizeof(struct rtc_time));
32 err = rtc->ops->read_time(rtc->dev.parent, tm);
33 if (err < 0) {
34 dev_dbg(&rtc->dev, "read_time: fail to read: %d\n",
35 err);
36 return err;
37 }
38
39 err = rtc_valid_tm(tm);
40 if (err < 0)
41 dev_dbg(&rtc->dev, "read_time: rtc_time isn't valid\n");
42 }
43 return err;
44 }从以上代码中的32行可以看出,__rtc_read_time函数会通过调用rtc_class_ops中的read_time来从
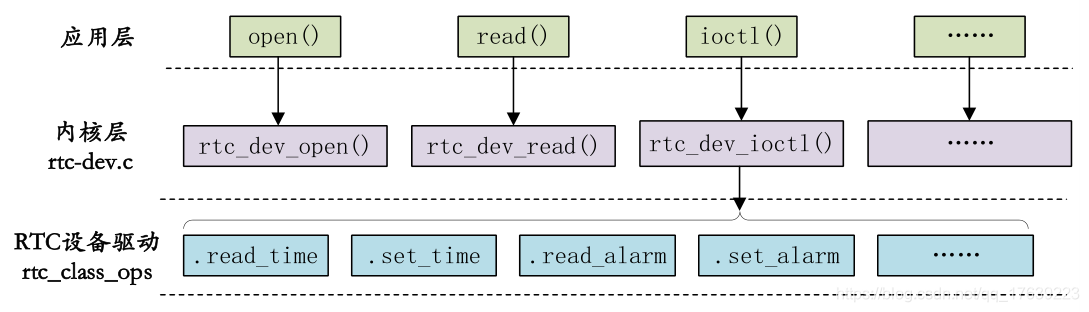
RTC设备中获取当前时间。rtc_dev_ioctl函数对其他的命令处理都是类似的,比如
RTC_ALM_READ命令会通过rtc_read_alarm函数获取到闹钟值,而rtc_read_alarm函数经过层层
调用,最终会调用rtc_class_ops中的read_alarm函数来获取闹钟值。至此,Linux内核中RTC驱动
调用流程就很清晰了,如图所示:
当rtc_class_ops准备好以后需要将其注册到Linux内核中,这里我们可以使用rtc_device_register
函数完成注册工作。此函数会申请一个rtc_device并且初始化这个rtc_device,最后向调用者返回这
个rtc_device,此函数原型如下:
struct rtc_device *rtc_device_register(const char *name,
struct device *dev,
const struct rtc_class_ops *ops,
struct module *owner)
函数参数和返回值含义如下:
name:设备名字。
dev:设备。
ops:RTC底层驱动函数集。
owner:驱动模块拥有者。
返回值:注册成功的话就返回rtc_device,错误的话会返回一个负值。
当卸载RTC驱动的时候需要调用rtc_device_unregister函数来注销注册的rtc_device,函数原型如
下:
void rtc_device_unregister(struct rtc_device *rtc)函数参数和返回值含义如下:
rtc:要删除的rtc_device。
返回值:无。
还有另外一对rtc_device注册函数devm_rtc_device_register和devm_rtc_device_unregister,分别
为注册和注销rtc_device。
2.I.MX6U内部RTC驱动分析
先直接告诉大家,I.MX6U的RTC驱动我们不用自己编写,因为NXP已经写好了。其实对于大多数
的SOC来讲,内部RTC驱动都不需要我们去编写,半导体厂商会编写好。但是这不代表我们就偷
懒了,虽然不用编写RTC驱动,但是我们得看一下这些原厂是怎么编写RTC驱动的。分析驱动,先
从设备树入手,打开imx6ull.dtsi,在里面找到如下snvs_rtc设备节点,节点内容如下所示:
1 snvs_rtc: snvs-rtc-lp {
2 compatible = "fsl,sec-v4.0-mon-rtc-lp";
3 regmap = <&snvs>;
4 offset = <0x34>;
5 interrupts = <GIC_SPI 19 IRQ_TYPE_LEVEL_HIGH>, <GIC_SPI 20 IRQ_TYPE_LEVEL_HIGH>;
6 };第2行设置兼容属性compatible的值为“fsl,sec-v4.0-mon-rtc-lp”,因此在Linux内核源码中搜索此字
符串即可找到对应的驱动文件,此文件为drivers/rtc/rtc-snvs.c,在rtc-snvs.c文件中找到如下所示
内容:
380 static const struct of_device_id snvs_dt_ids[] = {
381 { .compatible = "fsl,sec-v4.0-mon-rtc-lp", },
382 { /* sentinel */ }
383 };
384 MODULE_DEVICE_TABLE(of, snvs_dt_ids);
385
386 static struct platform_driver snvs_rtc_driver = {
387 .driver = {
388 .name = "snvs_rtc",
389 .pm = SNVS_RTC_PM_OPS,
390 .of_match_table = snvs_dt_ids,
391 },
392 .probe = snvs_rtc_probe,
393 };
394 module_platform_driver(snvs_rtc_driver);第380~383行,设备树ID表,有一条compatible属性,值为“fsl,sec-v4.0-mon-rtc-lp”,因此
imx6ull.dtsi中的snvs_rtc设备节点会和此驱动匹配。
第386~393行,标准的platform驱动框架,当设备和驱动匹配成功以后snvs_rtc_probe函数就会执
行。我们来看一下snvs_rtc_probe函数,函数内容如下(有省略):
238 static int snvs_rtc_probe(struct platform_device *pdev)
239 {
240 struct snvs_rtc_data *data;
241 struct resource *res;
242 int ret;
243 void __iomem *mmio;
244
245 data = devm_kzalloc(&pdev->dev, sizeof(*data), GFP_KERNEL);
246 if (!data)
247 return -ENOMEM;
248
249 data->regmap = syscon_regmap_lookup_by_phandle(pdev->dev.of_node, "regmap");
250
251 if (IS_ERR(data->regmap)) {
252 dev_warn(&pdev->dev, "snvs rtc: you use old dts file,please update it\n");
253 res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
254
255 mmio = devm_ioremap_resource(&pdev->dev, res);
256 if (IS_ERR(mmio))
257 return PTR_ERR(mmio);
258
259 data->regmap = devm_regmap_init_mmio(&pdev->dev, mmio, &snvs_rtc_config);
260 } else {
261 data->offset = SNVS_LPREGISTER_OFFSET;
262 of_property_read_u32(pdev->dev.of_node, "offset",&data->offset);
263 }
264
265 if (!data->regmap) {
266 dev_err(&pdev->dev, "Can't find snvs syscon\n");
267 return -ENODEV;
268 }
269
270 data->irq = platform_get_irq(pdev, 0);
271 if (data->irq < 0)
272 return data->irq;
......
285
286 platform_set_drvdata(pdev, data);
287
288 /* Initialize glitch detect */
289 regmap_write(data->regmap, data->offset + SNVS_LPPGDR,SNVS_LPPGDR_INIT);
290
291 /* Clear interrupt status */
292 regmap_write(data->regmap, data->offset + SNVS_LPSR,0xffffffff);
293
294 /* Enable RTC */
295 snvs_rtc_enable(data, true);
296
297 device_init_wakeup(&pdev->dev, true);
298
299 ret = devm_request_irq(&pdev->dev, data->irq, snvs_rtc_irq_handler,
300 IRQF_SHARED, "rtc alarm", &pdev->dev);
301 if (ret) {
302 dev_err(&pdev->dev, "failed to request irq %d: %d\n",
303 data->irq, ret);
304 goto error_rtc_device_register;
305 }
306
307 data->rtc = devm_rtc_device_register(&pdev->dev, pdev->name,
308 &snvs_rtc_ops, THIS_MODULE);
309 if (IS_ERR(data->rtc)) {
310 ret = PTR_ERR(data->rtc);
311 dev_err(&pdev->dev, "failed to register rtc: %d\n", ret);
312 goto error_rtc_device_register;
313 }
314
315 return 0;
316
317 error_rtc_device_register:
318 if (data->clk)
319 clk_disable_unprepare(data->clk);
320
321 return ret;
322 }第253行,调用platform_get_resource函数从设备树中获取到RTC外设寄存器基地址。
第255行,调用函数devm_ioremap_resource完成内存映射,得到RTC外设寄存器物理基地址对应
的虚拟地址。
第259行,Linux3.1引入了一个全新的regmap机制,regmap用于提供一套方便的API函数去操作底
层硬件寄存器,以提高代码的可重用性。snvs-rtc.c文件会采用regmap机制来读写RTC底层硬件寄
存器。这里使用devm_regmap_init_mmio函数将RTC的硬件寄存器转化为regmap形式,这样
regmap机制的regmap_write、regmap_read等API函数才能操作寄存器。
第270行,从设备树中获取RTC的中断号。
第289行,设置RTC_LPPGDR寄存器值为SNVS_LPPGDR_INIT=0x41736166,这里就是用的
regmap机制的regmap_write函数完成对寄存器进行写操作。
第292行,设置RTC_LPSR寄存器,写入0xffffffff,LPSR是RTC状态寄存器,写1清零,因此这一
步就是清除LPSR寄存器。
第295行,调用snvs_rtc_enable函数使能RTC,此函数会设置RTC_LPCR寄存器。
第299行,调用devm_request_irq函数请求RTC中断,中断服务函数为snvs_rtc_irq_handler,用于
RTC闹钟中断。
第307行,调用devm_rtc_device_register函数向系统注册rtc_devcie,RTC底层驱动集为
snvs_rtc_ops。snvs_rtc_ops操作集包含了读取/设置RTC时间,读取/设置闹钟等函数。
snvs_rtc_ops内容如下:
200 static const struct rtc_class_ops snvs_rtc_ops = {
201 .read_time = snvs_rtc_read_time,
202 .set_time = snvs_rtc_set_time,
203 .read_alarm = snvs_rtc_read_alarm,
204 .set_alarm = snvs_rtc_set_alarm,
205 .alarm_irq_enable = snvs_rtc_alarm_irq_enable,
206 };我们就以第201行的snvs_rtc_read_time函数为例讲解一下rtc_class_ops的各个RTC底层操作函数
该如何去编写。snvs_rtc_read_time函数用于读取RTC时间值,此函数内容如下所示:
126 static int snvs_rtc_read_time(struct device *dev, struct rtc_time *tm)
127 {
128 struct snvs_rtc_data *data = dev_get_drvdata(dev);
129 unsigned long time = rtc_read_lp_counter(data);
130
131 rtc_time_to_tm(time, tm);
132
133 return 0;
134 }第129行,调用rtc_read_lp_counter获取RTC计数值,这个时间值是秒数。
第131行,调用rtc_time_to_tm函数将获取到的秒数转换为时间值,也就是rtc_time结构体类型,
rtc_time结构体定义如下:
20 struct rtc_time {
21 int tm_sec;
22 int tm_min;
23 int tm_hour;
24 int tm_mday;
25 int tm_mon;
26 int tm_year;
27 int tm_wday;
28 int tm_yday;
29 int tm_isdst;
30 };最后我们来看一下rtc_read_lp_counter函数,此函数用于读取RTC计数值,函数内容如下(有省
略):
50 static u32 rtc_read_lp_counter(struct snvs_rtc_data *data)
51 {
52 u64 read1, read2;
53 u32 val;
54
55 do {
56 regmap_read(data->regmap, data->offset + SNVS_LPSRTCMR,&val);
57 read1 = val;
58 read1 <<= 32;
59 regmap_read(data->regmap, data->offset + SNVS_LPSRTCLR,&val);
60 read1 |= val;
61
62 regmap_read(data->regmap, data->offset + SNVS_LPSRTCMR,&val);
63 read2 = val;
64 read2 <<= 32;
65 regmap_read(data->regmap, data->offset + SNVS_LPSRTCLR,&val);
66 read2 |= val;
67 /*
68 * when CPU/BUS are running at low speed, there is chance that
69 * we never get same value during two consecutive read, so here
70 * we only compare the second value.
71 */
72 } while ((read1 >> CNTR_TO_SECS_SH) != (read2 >>CNTR_TO_SECS_SH));
73
74 /* Convert 47-bit counter to 32-bit raw second count */
75 return (u32) (read1 >> CNTR_TO_SECS_SH);
76 }第56~72行,读取RTC_LPSRTCMR和RTC_LPSRTCLR这两个寄存器,得到RTC的计数值,单位
为秒,这个秒数就是当前时间。这里读取了两次RTC计数值,因为要读取两个寄存器,因此可能存
在读取第二个寄存器的时候时间数据更新了,导致时间不匹配,因此这里连续读两次,如果两次的
时间值相等那么就表示时间数据有效。
第75行,返回时间值,注意这里将前面读取到的RTC计数值右移了15位。
这个就是snvs_rtc_read_time函数读取RTC时间值的过程,至于其他的底层操作函数大家自行分析
即可,都是大同小异的,这里就不再分析了。关于I.MX6U内部RTC驱动源码就讲解到这里。
3.RTC时间查看与设置
1、时间RTC查看
RTC是用来计时的,因此最基本的就是查看时间,Linux内核启动的时候可以看到系统时钟设置信息,如图所示:

从图中可以看出,Linux内核在启动的时候将snvs_rtc设置为rtc0,大家的启动信息可能会和图中的
不同,但是内容基本上都是一样的。如果要查看时间的话输入“date”命令即可,结果如图所示:

从图可以看出,当前时间为1970年1月1日00:06:11,很明显是时间不对,我们需要重新设置RTC
时间。
2、设置RTC时间
RTC时间设置也是使用的date命令,输入“date--help”命令即可查看date命令如何设置系统时间,结
果如图所示:
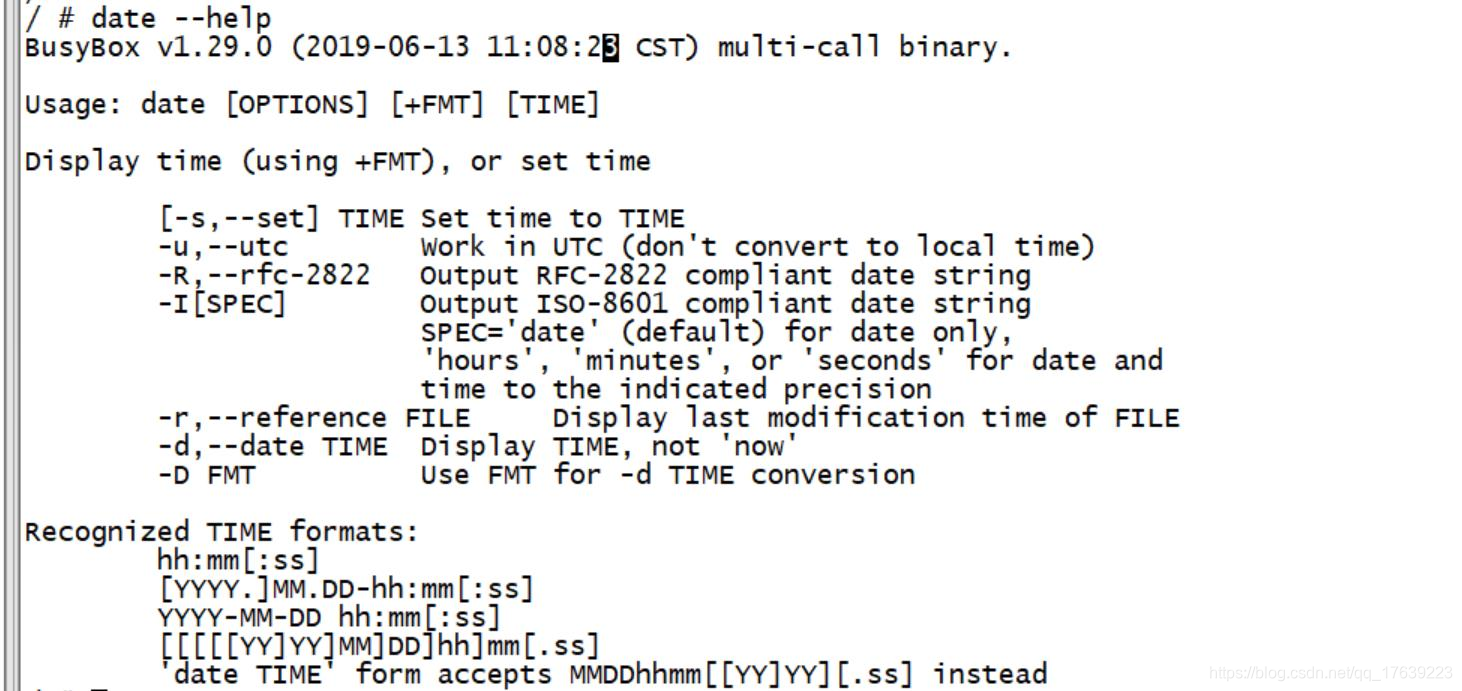
现在我要设置当前时间为2019年8月31日18:13:00,因此输入如下命令:
date -s "2019-08-31 18:13:00"设置完成以后再次使用date命令查看一下当前时间就会发现时间改过来了,如图所示:

大家注意我们使用“date-s”命令仅仅是将当前系统时间设置了,此时间还没有写入到I.MX6U内部
RTC里面或其他的RTC芯片里面,因此系统重启以后时间又会丢失。我们需要将当前的时间写入到
RTC里面,这里要用到hwclock命令,输入如下命令将系统时间写入到RTC里面:
hwclock -w //将当前系统时间写入到 RTC 里面时间写入到RTC里面以后就不怕系统重启以后时间丢失了,如果I.MX6U-ALPHA开发板底板接了纽
扣电池,那么开发板即使断电了时间也不会丢失。大家可以尝试一下不断电重启和断电重启这两种
情况下开发板时间会不会丢失。