固态激光和IMU紧耦合的里程计,主要创新点加速了卡尔曼增益的求解方法。固态激光由于视野较小,更容易收到环境退化的影响。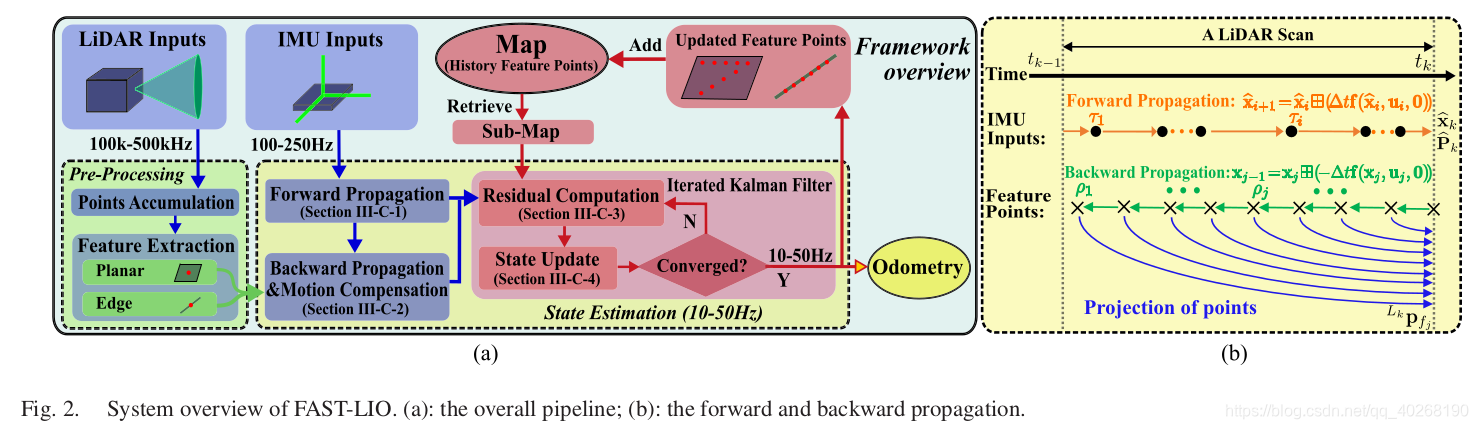
系统描述
状态描述和常规的LIO类似。对于固态激光雷达,本文截取一段时间内获取的点云做一次处理,认为是一次扫描。
前向传播和反向传播
前向传播指基于imu观测关系状态估计先验,反向传播指基于后验位姿估计对点云做运动补偿。
位姿优化
残差计算和LeGO-LOAM类似,优化了卡尔曼增益的表达,使得需要求逆的矩阵规模不再和输入数据规模相关,显著加快了求解速度。
版权声明:本文为qq_40268190原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。