射线与三角形求交 在几何选取、碰撞检测上 经常会用到,在计算机图形学上是最初级的应用。
问题的由来 来自三维场景的鼠标点选,即通过鼠标点击 二维屏幕,对应于三维虚拟相机位置发出的一条射线,与场景中的几何进行求交。
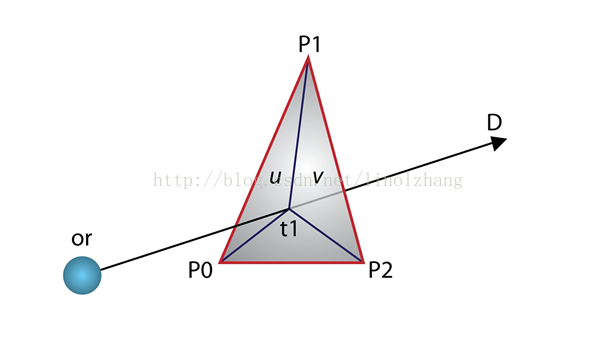
射线与三角形求交可以分为两步:
1. 射线与平面求交
2. 计算交点在对应三角形内的位置
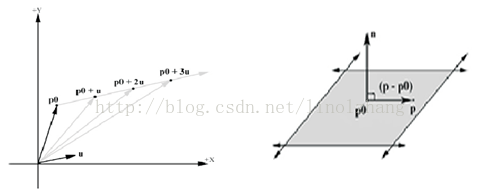
射线 可以描述为:p(t) = p0 + tu, 其中p0是射线的起始点,u是射线的方向向量(需要单位化),t在[0,+无穷]。
平面 可以描述为:n.(p-p0) = 0, 其中p为平面上的任意一点,n为平面的单位法向量。
设d = -n.p0 n=(a,b,c) p=(x,y,z),所以有:n.p+d = 0 即 ax+by+cz+d=0 为平面方程。
空间中一点P,如果n.P + d =0,那么P在(n.p+d=0)表示的平面上,如果大于0,该点在平面的上面(法线所指的方向),如果小于0,该点在平面的下面。
射线与平面的交点:
利用上面所介绍的射线和面的交点只要把 p(t) 代入(n.p+d=0)方程,就能够得到:
n.p(t)+d = 0
=> n.(porig+t*vDir)+d=0;
=> n.porig+t*n.vDir+d=0;
=> t = (-d-n.porig)/ n.vDir = (n.p0-n.porig) / n.vDir
=> t = n.(p0- porig)/ n.vDir
根据 p(t) = porig+t*vDir,如果 t 大于等于0说明射线和面有交点。
代码可以描述为:
// 射线与三角形求交V0,V1,V2三角形三顶点 I为交点
bool rayIntersect(const Point3D& origin,const CVector3& rayDir,Point3D& interPoint)
{
// 射线与三角形平行?
CVector3 u = v1 - v0; // edge1
CVector3 v = v2 - v0; // edge2
CVector3 norm = u.getCrossProduct(v); // normal
if (norm == CVector3(0.0f, 0.0f, 0.0f)) // triangle is degenerate
return false;
// 计算射线与平面法向夹角
float b = norm.getDotProduct(rayDir);
if (fabs(b) < e-5) // ray is parallel to triangle plane
return false;
// 计算v0到射线起始点的向量
CVector3 w0 = origin - v0;
float a = -( norm.getDotProduct(w0) );
// get intersect point of ray with triangle plane
float r = a / b;
if (r < 0.0f) // ray goes away from triangle
return false; // => no intersect
// for a segment, also test if (r > 1.0) => no intersect
// 计算射线与平面的交点
interPoint = origin + r * rayDir;
// 计算交点是否在三角形内部?
float uu = u.getDotProduct(u);
float uv = u.getDotProduct(v);
float vv = v.getDotProduct(v);
CVector3 w = interPoint - v0;
float wu = w.getDotProduct(u);
float wv = w.getDotProduct(v);
float D = uv * uv - uu * vv;
// get and test parametric coords
float s = (uv * wv - vv * wu) / D;
if (s < 0.0f || s > 1.0f) // I is outside T
return false;
float t = (uv * wu - uu * wv) / D;
if (t < 0.0f || (s + t) > 1.0f) // I is outside T
return false;
return true; // 交点在三角形内部
}
里面用到的 点乘、叉乘等操作 比较简单,大家可以自己实现,作者也将会在后续章节中进行汇总实现。
另外,场景求交是一个系统工程,需要考虑到复杂场景的大量计算,因此,效率是我们需要重点考虑的一个问题,通常,包围盒是一种非常好的加速计算的方法,可以大大减少非必要的求交计算过程。