首先在~/demo01_ws/src/learning_communication/src中创立订阅者的cpp文件。
vim listener.cpp
----------------------------------
#include"ros/ros.h"
#include<sstream>
#include "std_msgs/String.h"
void chatterCallback(const std_msgs::String::ConstPtr &msg){
ROS_INFO("I heard: [%s]",msg->data.c_str());
}
int main(int argc, char* argv[]){
ros::init(argc,argv,"listener");
ros::NodeHandle n;
ros::Subscriber sub=n.subscribe("chatter",1000,&chatterCallback);
//cout<<111;
//while(ros::ok()){
//loop_rate.sleep();
ros::spin();
//}
return 0;
}
此时同样修改CMakeList.txt(与发布时同一个)
add_executable(listener src/listener.cpp)
target_link_libraries(listener
${catkin_LIBRARIES}
)
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp ${catkin_EXPORTED_TARGETS})
之后先进行catkin_make进行编译;对发布和订阅前都要进行source ./devel/setup.bash,之后再进行rosrun learning_communication talker 和rosrun learning_communication listener,注意要先运行发布再运行订阅,同时注意,两者要同时运行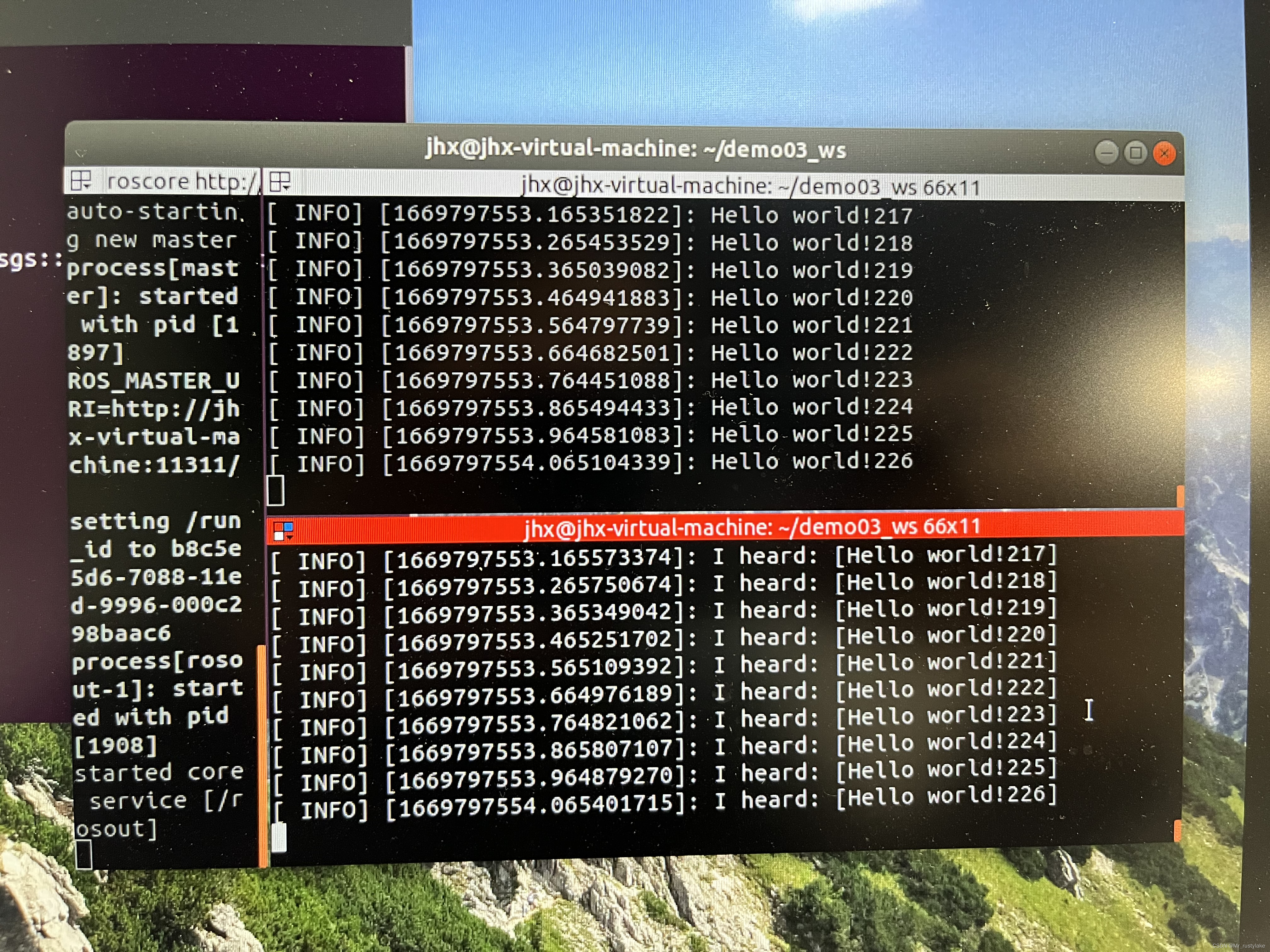
这样基本就能实现发布和订阅了
---------------------------------------------------
补充:因为订阅者在发布者处注册需要时间,所以可能一开始的数据无法接受到,此时我们可以在发布者的cpp文档中的while循环前加上ros::Duration(1).sleep(); 使订阅者有时间注册而不错过数据