参考资料
1. 李群李代数基础
上一讲,我们介绍了旋转矩阵和变换矩阵的定义。当时,我们说三维旋转矩阵构成了特殊正交群S O ( 3 ) SO(3)SO(3),而变换矩阵构成了特殊欧氏群S E ( 3 ) SE(3)SE(3):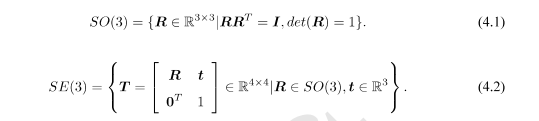
旋转矩阵也好,变换矩阵也好,它们对加法是不封闭的。换句话说,对于任意两个旋转矩阵R 1 , R 2 R_1, R_2R1,R2,它们按照矩阵加法的定义,和不再是一个旋转矩阵: 对于变换矩阵亦是如此。我们发现,这两种矩阵并没有良好定义的加法,相对的,它们只有一种较好的运算:乘法。S O ( 3 ) SO(3)SO(3)和S E ( 3 ) SE(3)SE(3)关于乘法是封闭的:
对于变换矩阵亦是如此。我们发现,这两种矩阵并没有良好定义的加法,相对的,它们只有一种较好的运算:乘法。S O ( 3 ) SO(3)SO(3)和S E ( 3 ) SE(3)SE(3)关于乘法是封闭的:

我们知道乘法对应着旋转或变换的复合 一两个旋转矩阵相乘表示做了两次旋转。对于这种只有一个运算的集合,我们把它叫做群。
1.1 群
群(Group)是一种集合加上一种运算的代数结构。我们把集合记作A,运算记作⋅ \cdot⋅,那么群可以记作G = ( A , ⋅ ) G= (A,\cdot)G=(A,⋅)。群要求这个运算满足以下几个条件: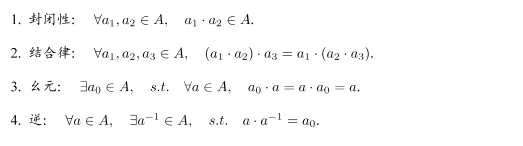
可以记作“封结幺逆”。我们可以验证,旋转矩阵集合和矩阵乘法构成群,同样变换矩阵和矩阵乘法也构成群(因此才能称它们为旋转矩阵群和变换矩阵群)。其他常见的群包括整数的加法( Z , + ) (\mathbb{Z},+)(Z,+),去掉0后的有理数的乘法(幺元为1)( Q − 0 , ⋅ ) (\mathbb{Q}-0, \cdot)(Q−0,⋅)等等。矩阵中常见的群有:

特殊欧氏群SE(n) 也就是前面提到的n维欧氏变换,如SE(2)和SE(3)。群结构保证了在群上的运算具有良好的性质,而群论则是研究群的各种结构和性质的理论。
1.1.1 李群
李群是指具有连续(光滑)性质的群。像整数群Z \mathbb{Z}Z那样离散的群没有连续性质,所以不是李群。而S O ( n ) SO(n)SO(n)和S E ( n ) SE(n)SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群。
每个李群都有对应的李代数。
1.2 李代数
考虑任意旋转矩阵R,我们知道它满足:
现在,我们说,R是某个相机的旋转,它会随时间连续地变化,即为时间的函数: R(t)。由于它仍是旋转矩阵,有
在等式两边对时间求导,得到:

可以看出R ˙ ( t ) R ( t ) T \dot{R}(t)R(t)^TR˙(t)R(t)T是一个反对称矩阵。
叉积中引入了KaTeX parse error: Expected group after '^' at position 1: ^̲符号,将一个向量变成了反对称矩阵。同理,对于任意反对称矩阵,我们亦能找到一个与之对应的向量。把这个运算用符号v表示:
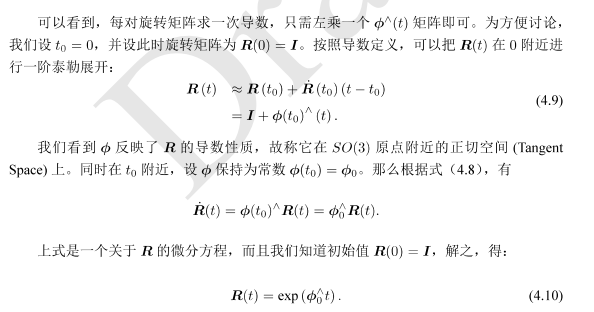
于是,由于R ˙ ( t ) R ( t ) T \dot{R}(t)R(t)^TR˙(t)R(t)T是一个反对称矩阵,我们可以找到一个三维向量ϕ ( t ) ∈ R 3 \phi(t)\in \mathbb{R}^3ϕ(t)∈R3与之对应。于是有:
等式两边右乘R ( t ) R(t)R(t),由于R为正交阵,有:
1.2.1 李代数的定义
每个李群都有与之对应的李代数。李代数描述了李群的局部性质。通用的李代数的定义如下:
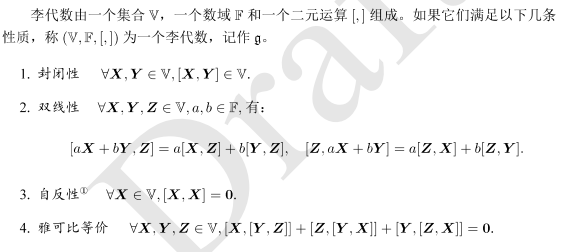
其中二元运算被称为李括号。从表面上来看,李代数所需要的性质还是挺多的。相比于群中的较为简单的二元运算,李括号表达了两个元素的差异。它不要求结合律,而要求元素和自己做李括号之后为零的性质。作为例子,三维向量R 3 \mathbb{R}^3R3上定义的叉积× \times×是一种李括号,因此g = ( R 3 , R , × ) g=(\mathbb{R}^3, \mathbb{R}, \times)g=(R3,R,×)构成了一个李代数。
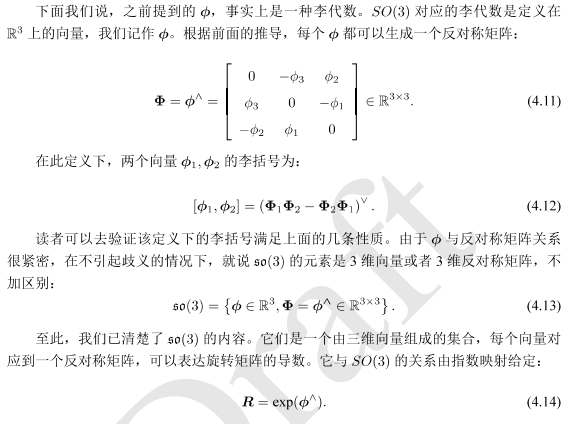
1.2.2 李代数so(3)
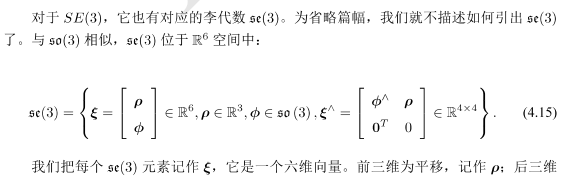
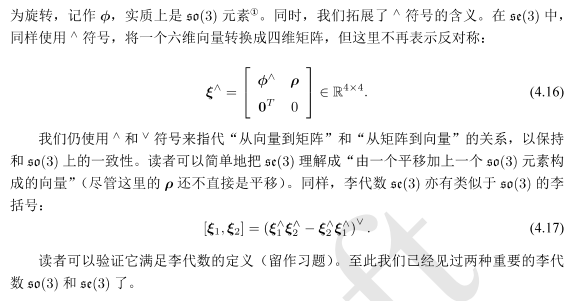
1.2.3 李代数se(3)
未完待续···