安装,普通安装的opencv-python是没有aruco类的,需要如下安装
pip install opencv-contrib-python首先import相关的包
import numpy as np
np.set_printoptions(suppress=True)
import time
import cv2
import cv2.aruco as aruco
import glob
import math下面是相机内参数标定函数
def calibrateKd(im_fpath, aruco_len=60.0):
(w, h) = (6,4)
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.01)
objp = np.zeros((w*h,3), np.float32)
objp[:,:2] = np.mgrid[0:w,0:h].T.reshape(-1,2)
objp = objp*aruco_len
objpoints,imgpoints = [],[]
images = glob.glob(f'{im_fpath}/*')
for fname in images:
img = cv2.imread(fname)
print('r %s'%(fname),end='')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, (w,h),None)
if ret == True:
objpoints.append(objp)
corners2 = cv2.cornerSubPix(gray, corners, (11,11), (-1,-1), criteria)
imgpoints.append(corners2)
img = cv2.drawChessboardCorners(img, (6,4), corners2, ret)
ret,mtx,dist,rvecs,tvecs = cv2.calibrateCamera(objpoints,imgpoints,gray.shape[::-1],None,None)
tot_error = 0
for i in range(len(objpoints)):
imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)
error = cv2.norm(imgpoints[i],imgpoints2, cv2.NORM_L2)/len(imgpoints2)
tot_error += error
print ('total error: ', tot_error/len(objpoints))
return mtx, dist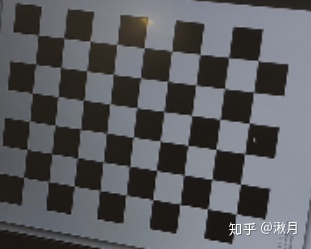
上文中的(w, h) = (6,4)是指外参板的格子数,aruco_len是单个格子的长度,单位毫米.im_fpath是图片的路径,里面保存的是包含外参板的图片.
返回的 mtx, dist为相机的内参数(3x3)和相机的畸变系数
下面的函数是相机的外参数标定
def calibrateRt(im, mtx=None, dist=None, aruco_len=0.204):
if mtx is None:
mtx = np.array([[2341.17, 0, 1895.73],
[0, 2339.87, 1105.74],
[0, 0, 1]])
if dist is None:
dist = np.array([[0.22391371,-0.58384357,-0.00010736,0.00021993,0.18890625]])
gray = cv2.cvtColor(im, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.Dictionary_get(aruco.DICT_4X4_50)
parameters = aruco.DetectorParameters_create()
corners,ids,rejectedImgPoints = aruco.detectMarkers(gray,aruco_dict,parameters=parameters)
rvec,tvec,_ = aruco.estimatePoseSingleMarkers(corners, aruco_len, mtx, dist)
if rvec.shape[0]!=1:
print('please remove other aruco!!!')
return None
R,t = cv2.Rodrigues(rvec[0])[0],tvec[0][0]
# R,t = rvec,tvec[0][0]
return R,t
aruco_len是外参板的长度,正方形的总长度!
返回值是相机的R(3x3)和t(3x1)
版权声明:本文为weixin_39687359原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。