问题描述:
已知在odo坐标系下body点的坐标(x_body_in_odo,y_body_in_odo),和obj点的坐标(x_obj_in_odo,y_obj_in_odo), odo坐标系和body坐标系的关系如下图所示,将odo坐标系逆时针旋转yaw已知,求obj在body坐标系下的位置

问题求解
思路1:求特殊数值然后总结规律
我们已知一个公式:
将odo坐标系逆时针旋转yaw得到body坐标系的旋转矩阵R
我们可以先平移再旋转,因此我们先上结论:
x_obj_in_body=cos(yaw)*(x_obj_in_odo-x_body_in_odo)+sin(yaw)*(y_obj_in_odo-y_body_in_odo)
y_obj_in_body=-sin(yaw)*(x_obj_in_odo-x_body_in_odo)+cos(yaw)*(y_obj_in_odo-y_body_in_odo)关于特殊特殊数值,我们假设yaw=45°,body在odo坐标系下的坐标是(1,1),obj在odo坐标系下的坐标是(-1,-1)

通过几何关系,我们可以很清晰的知道obj在body坐标系下的坐标是
思路2:根据旋转矩阵和平移向量来推到
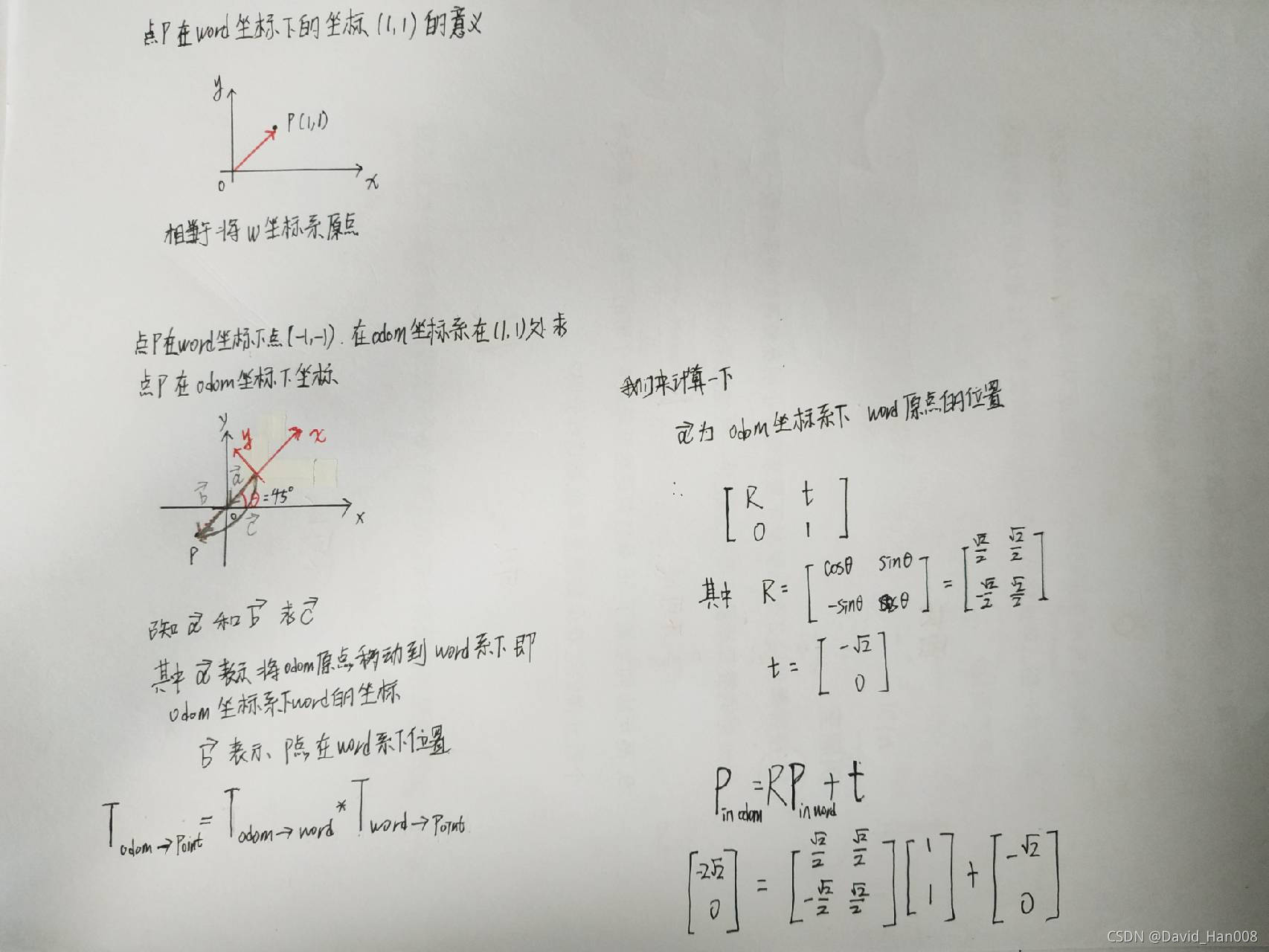
补充一下,相当于world坐标系原点指向p点的旋转
关于求解pnp的一些思考

版权声明:本文为David_Han008原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。