超前补偿器
目的
让加超前补偿器的目的是让系统更稳定,收敛更快
原理
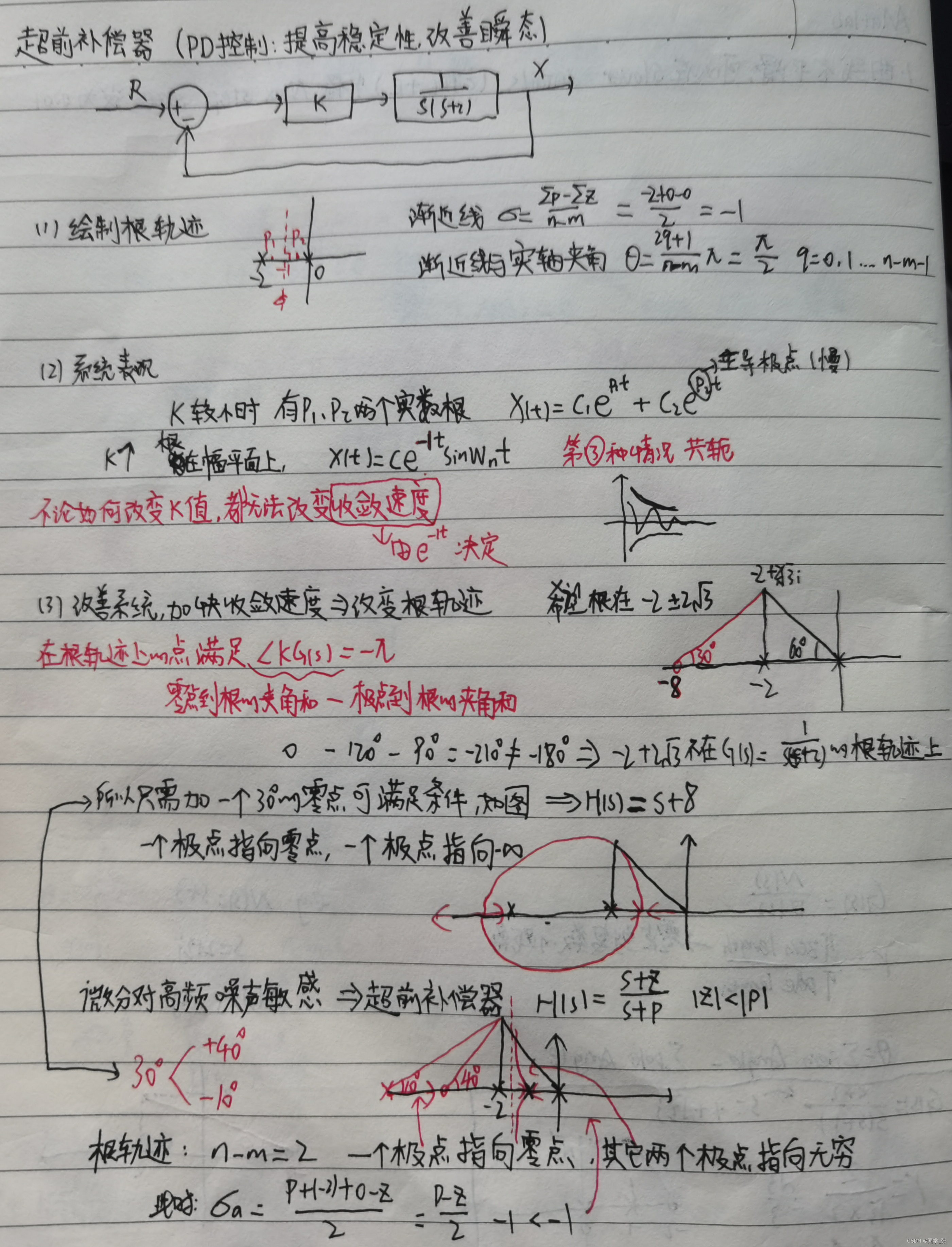
(1)超前补偿器的传递函数形式为H(s) = (s+z) / (s+p)其中,∣ z ∣ < ∣ p ∣
(2)假设我们的系统如上,系统开环传递函数为此系统有两个极点,分别是0和-2,作出其根轨迹如下图所示,如果我们想要系统更加稳定,收敛速度更快,那么我们希望该闭环的根向左移动。通过根轨迹图我们知道,调整K值会有一个根为
,如果根是
更理想。
(3)引入超前补偿器改善系统
在根轨迹上的点满足∠kG(s) = -Π,即零点到根的夹角和 - 极点到根的夹角和
滞后补偿器
目的
减小稳态误差
原理
滞后补偿器的传递函数形式为H(s) = (s+z) / (s+p)其中,∣ z ∣ > ∣ p ∣
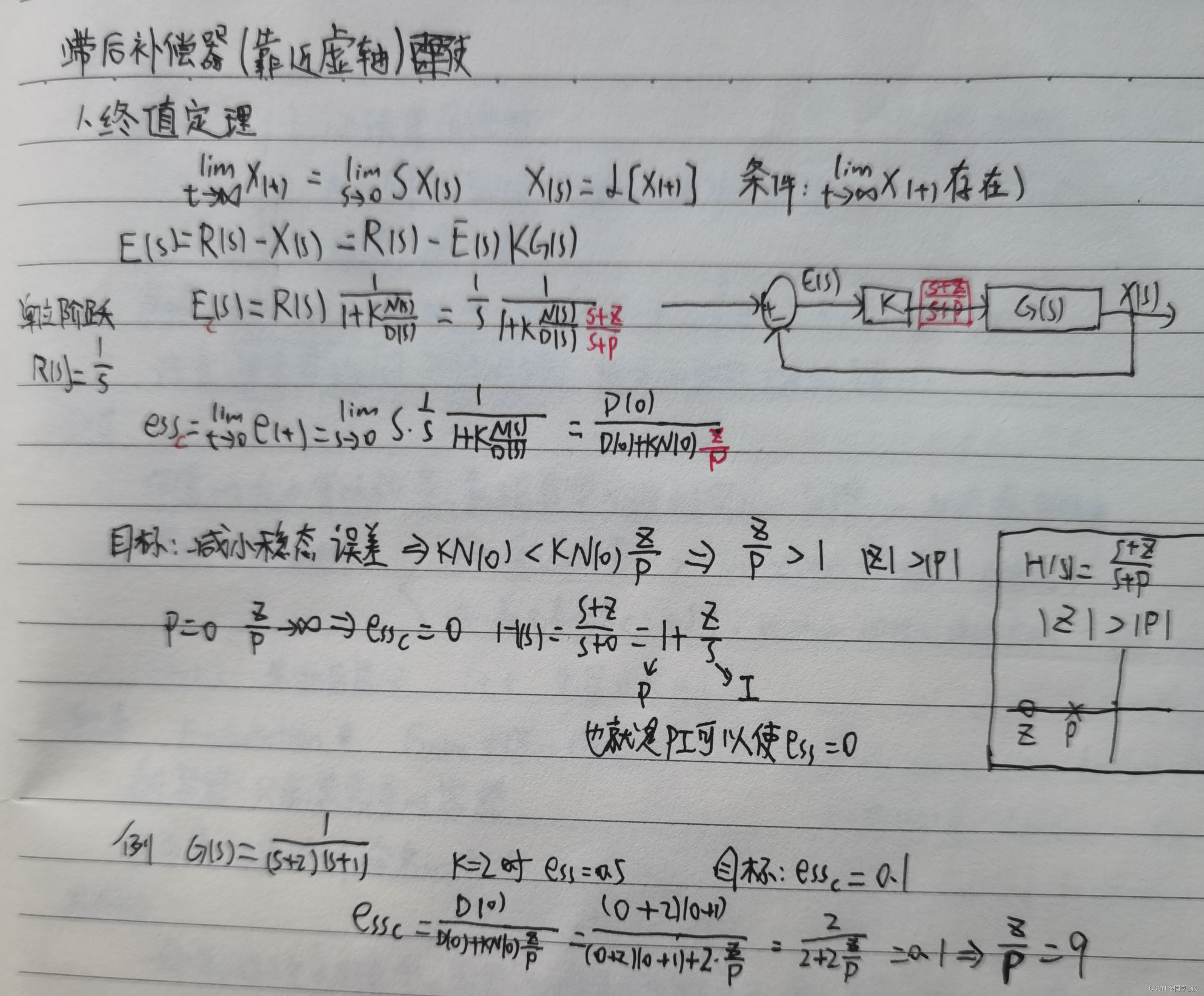
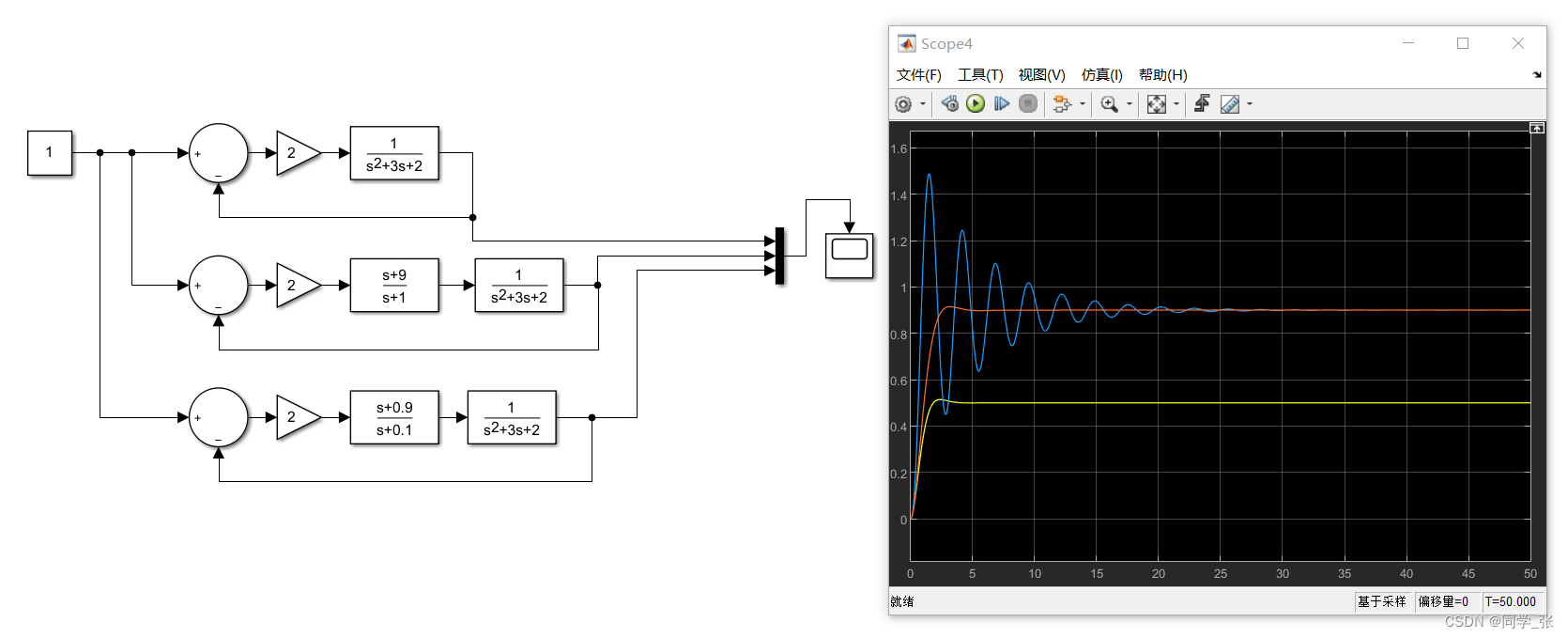
但此时无法确定 z、p 的值,所以用1、9/0.1、0.9两组数据进行观测,结果如下:
注意:设计滞后补偿器时,零极点对应尽量靠近复平面的虚轴,这样才能在减少稳态误差的同时不会过大的改变系统原有的特性(根轨迹)
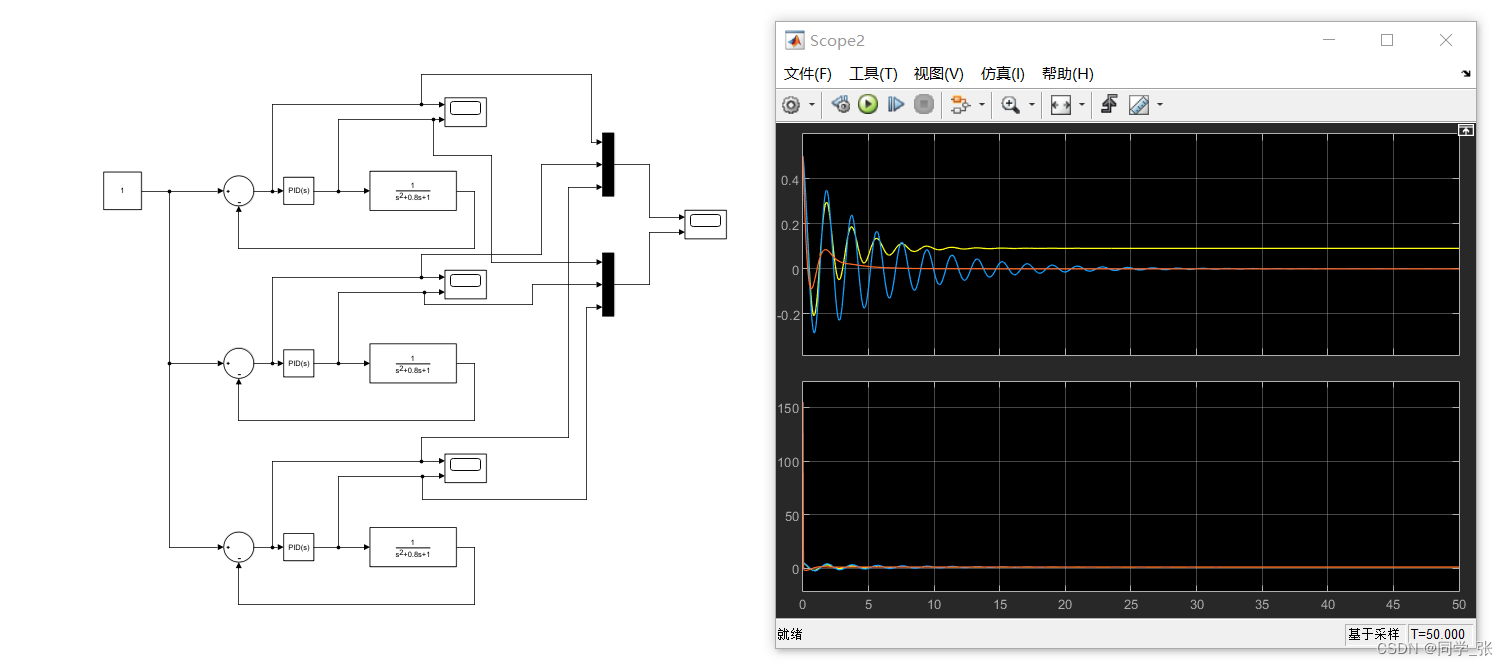
PID
版权声明:本文为m0_64257135原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。