基于ADAM S和M a tl ab的新型复合式
高速转子在线动平衡装置联合仿真
中北大学 程 峰 王俊元 蒋红琰
摘 要:介绍一种复合式高速转子动平衡装置在ADAMS和Matlab软件下的模糊控制动平衡仿真分析。主要介绍了动平衡装置系统模型的建立以及对虚拟样机的仿真分析,证明振动在10000r/m in速度点附近减少了95%,平衡后转子达到动平衡品质标准。
关键词:动平衡;联合仿真;虚拟样机;ADAMS;Matlab
Abstract:This paper covers ADAM S and Matlab based fuzzy dyna m ic balancing si m ulati on analysis of compound dy2 na m ic balancing device f or high-s peed r ot or system,f ocusing on how t o build the model of the dyna m ic balancing device and si m ulati on analysis of the p r ot otype1It is p r oved that vibrati on is reduced95%at the s peed of about10000r/m in and r ot or dyna m ic balancing standard is met1
Keywords:dyna m ic balancing;collaborative si m ulati on;virtual p r ot otype;ADAM S;Matlab
ADAM S软件对于控制系统设计,提供的控
制工具箱只能处理一般的控制环节(比如PLD 控制),而M atlab是大型控制系统设计软件,能够处理各种高级控制环节(比如智能控制系统)[2],将两者结合起来使用,充分发挥它们各自优势,将给那些复杂系统的研究提供一种新的途径。
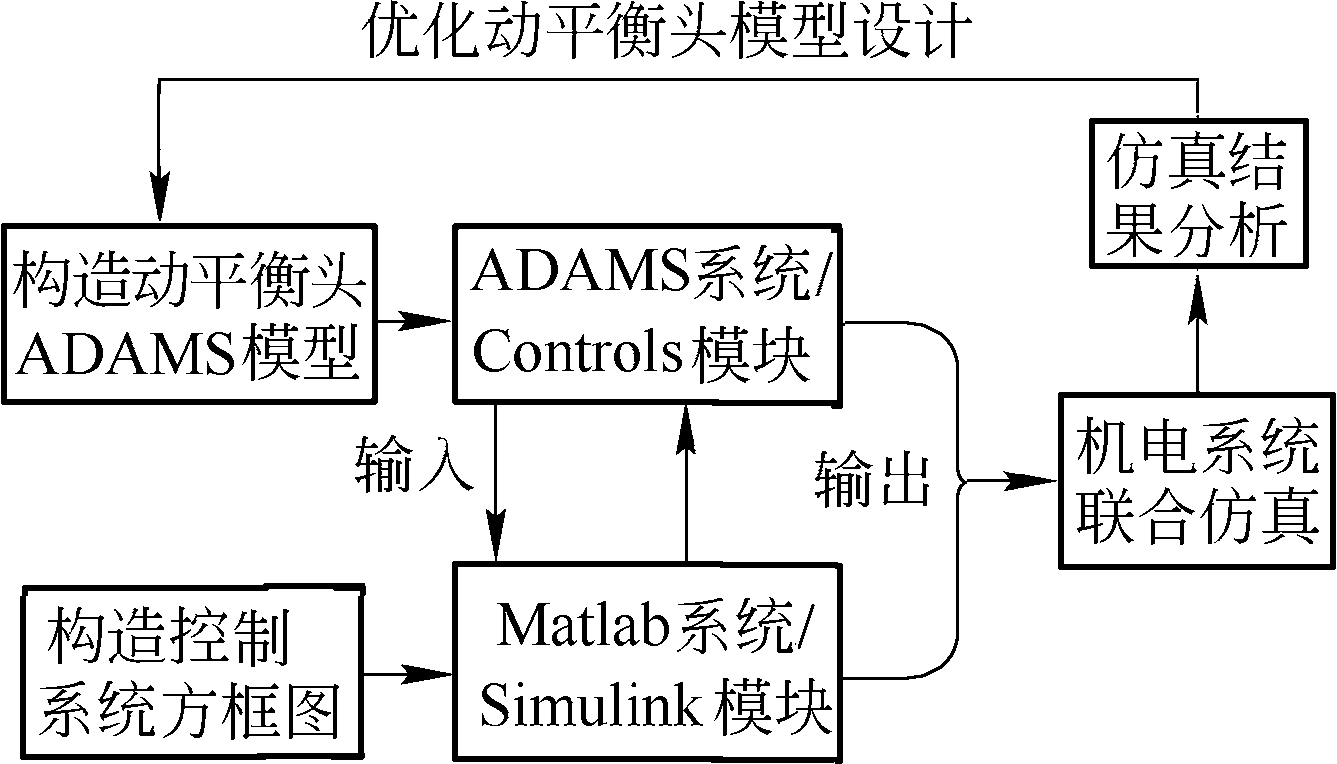
本文使用ADAMS与Matlab/Si m ulink联合仿真的方案对一种复合式高速转子在线动平衡装置模型进行动力学仿真。基于ADAMS/Contr ols模块建立动平衡装置虚拟样机,通过Matlab/Si m ulink模块建立控制系统框图以及图形接口,并利用其提供的功能向ADAMS中的动平衡模型系统输入了转速与外加负载。该方案能够改变ADAMS只能仿真理想电机的局限,实现使用Matlab/Si m ulink构造复杂的电机模型和控制方式。图1所示为ADAMS 与Matlab联合仿真基本设计流程。
1 复合式动平衡装置建模
图2为动平衡总体装置图,装置结构原理如图3所示。其工作过程:转子工作时预先设定了振动(最大质量重心偏移量)极限,传感器实时监测不平衡量、转子转速、不平衡量相位、滑盘b、c和平衡块b、c相位。当测量的振动值高于设定的参考值时,程序执行动平衡
,
图1 ADAMS与M atlab联合仿真基本设计流程
甚至在程序完成平衡之后,随着旋转速度的改变而产生的新的振动量再次大于设定值时,系统仍继续监测转子状态。首先,基于间接在线动平衡装置的设计思想,利用电磁场的耦合作用,无接触地在加重平面A-A处形成一个具有相同幅值和相位的径向电磁力,使该电磁力与所需的离心力等效,实现在线实时精密补偿[3];考虑到此时空旋转电磁力能耗大、机械结构内应力大的缺点,考虑基于混合型在线动平衡装置的设计思想,应用电机的工作原理,运用影响系数法控制策略,在平衡装置B-B、C-C 截面上利用旋转极坐标合成矢量力,使得转子质心落在旋转中心上[4]。同时,撤消时空旋转电磁力,转子系统在极坐标合成力的作用下实现动平衡。