目录
一、固件库模板
二、准备资料
- 固件库模板
- MDK5开发环境
- stm32参考手册
- IIC协议
- OLED 数据手册及实物
- 字模软件
- 红外遥控设备
实验程序已经发布到百度网盘,本文末有链接可以自取
IIC协议查看这篇博客IIC协议
字模链接 链接:https://pan.baidu.com/s/1k_ay03xnAdGChirlTpTIVA
提取码:OLED
三、红外遥控简介

红外遥控是一种无线、非接触控制技术,具有抗干扰能力强,信息传输可靠,功耗低,成本低,易实现等显著优点,被诸多电子设备特别是家用电器广泛采用,并越来越多的应用到计算机系统中。同类产品的红外线遥控器,可以有相同的遥控频率或编码,并不会出现遥控信号“串门”的情况这是因为,红外遥控的编码目前广泛使用的是:NEC Protocol 的PWM(脉冲宽度调制)和Philips RC-5 Protocol 的PPM(脉冲位置调制)
1. 引脚
| 标号 | PIN | 引脚说明 |
|---|---|---|
| 1 | GND | 电源地 |
| 2 | VCC | 电源正 |
| 3 | data | 数据输入引脚 |
2. NEC协议特征和码位定义
- 协议特征:
- 8位地址和8位指令长度;
- 地址和命令2次传输(确保可靠性);
- PWM脉冲宽度调制,以发射红外载波的占空比代表“0”和“1”;
- 载波频率为38Khz;
- 位时间为1.125ms或2.25ms;
- 码位定义
NEC码的位定义:一个脉冲对应560us的连续载波,
一个逻辑1传输需要2.25ms(560us脉冲+1680us低电平),
一个逻辑0的传输需要1.125ms(560us脉冲+560us低电平)。
而遥控接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,这样,我们在接收头端收到的信号为:逻辑1应该是560us低+1680us高,逻辑0应该是560us低+560us高。 - NEC遥控器指令格式
NEC遥控指令的数据格式为:同步码(引导码)、地址码、地址反码、控制码、控制反码。同步码由一个9ms的低电平和一个4.5ms的高电平也就是9000us低+ 4500us高组成,地址码、地址反码、控制码、控制反码均是8位数据格式。按照低位在前,高位在后的顺序发送。采用反码是为了增加传输的可靠性(可用于校验)。
四、OLED显示红外遥控按键数据实验
1.硬件设计
GND接GND
VCC接3.3
OLED的SCL接stm32的B10(模拟IIC)
OLED的SDA接stm32的B11(模拟IIC)
硬件IIC请查看IIC协议
红外接收引脚接stm32的B9
2.软件设计
捕获——>保存——>发射(显示)
配置通讯使用的目标引脚为开漏模式;
使能 I2C 外设的时钟;
配置 I2C 外设的模式、地址、速率等参数并使能 I2C 外设;
编写向OLED写入函数;
编写OLED初始化指令
开启红外遥控数据输入引脚(PB9)、定时器时钟
配置PB9上拉输入
配置定时器4的输入捕获
使能使能定时器4
配置中断并使能
允许更新中断 ,允许CC4IE捕获中断
遥控器接收状态判断
处理红外键盘返回值:
显示给OLED
2.1 复制工程 (六、stm32-OLED)
2.2 新建oled文件(打开工程)

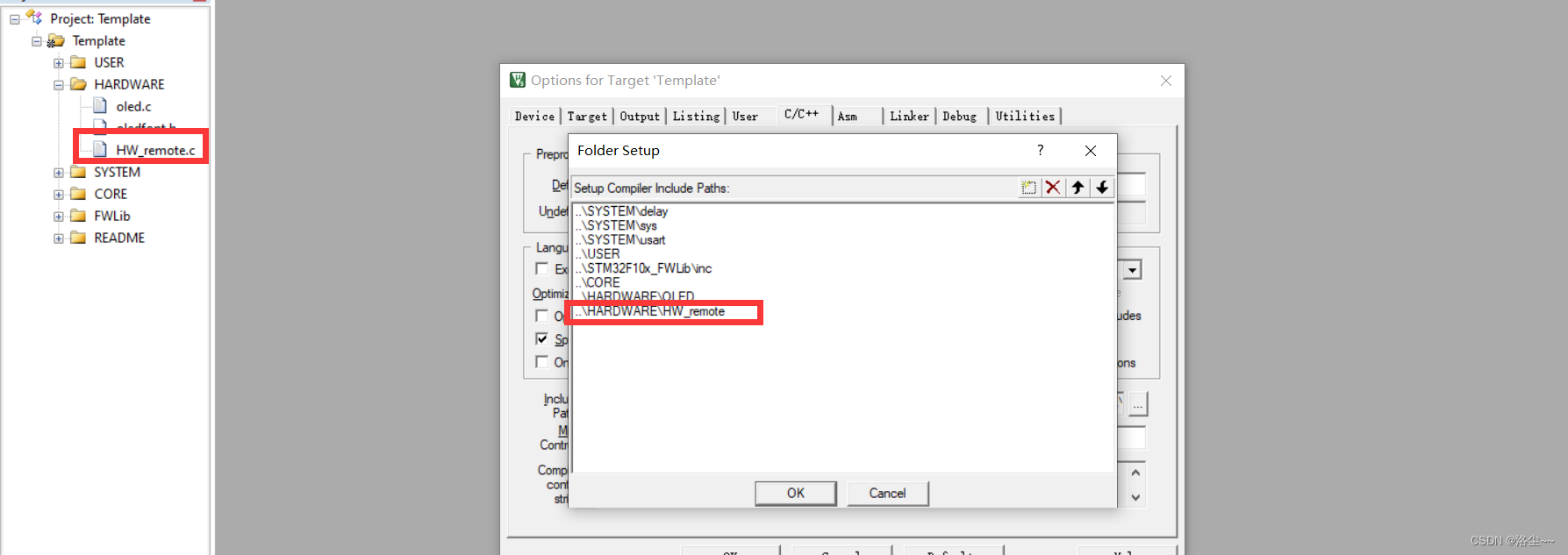
2.3 编写代码
oled.h(模拟IIC)
切记尽量避免使用PB3、PB4,具体看stm32f103c8t6使用PB3和PB4做普通GPIO使用时发现异常
这里使用OLED的SCl是PB10,SDA是PB11
#ifndef __OLED_H_
#define __OLED_H_
#include "stm32f10x.h"
#include "sys.h"
#include "stdlib.h"
//----------------OLED端口定义----------------
#define OLED_SCLK_Pin GPIO_Pin_10
#define OLED_SDIN_Pin GPIO_Pin_11
#define OLED_CLK RCC_APB2Periph_GPIOB
#define OLED_PORT GPIOB
#define OLED_SCLK_Clr() GPIO_ResetBits(OLED_PORT,OLED_SCLK_Pin)
#define OLED_SCLK_Set() GPIO_SetBits(OLED_PORT,OLED_SCLK_Pin)//SCL
#define OLED_SDIN_Clr() GPIO_ResetBits(OLED_PORT,OLED_SDIN_Pin)//DIN
#define OLED_SDIN_Set() GPIO_SetBits(OLED_PORT,OLED_SDIN_Pin)
#define OLED_CMD 0 //写命令
#define OLED_DATA 1 //写数据
void I2C_Start(void);
void I2C_Stop(void);
void I2C_WaitAck(void);
void Send_Byte(u8 dat);
void OLED_WR_Byte(u8 dat, u8 mode);
void Write_Cmd(void);
void OLED_WR_CMD(uint8_t cmd);
void OLED_WR_DATA(uint8_t data);
void OLED_Init(void);
void OLED_Clear(void);
void OLED_Display_On(void);
void OLED_Display_Off(void);
void OLED_Set_Pos(uint8_t x, uint8_t y);
void OLED_On(void);
void OLED_ShowNum(uint8_t x, uint8_t y, unsigned int num, uint8_t len, uint8_t size2);
void OLED_ShowChar(uint8_t x, uint8_t y, uint8_t chr, uint8_t Char_Size);
void OLED_ShowString(uint8_t x, uint8_t y, uint8_t *chr, uint8_t Char_Size);
void OLED_ShowCHinese(uint8_t x, uint8_t y, uint8_t no);
#endif
/******************************** END OF FILE *********************************/
HW_remote.c
#include "HW_remote.h"
#include "delay.h"
#include "usart.h"
//红外遥控初始化
//设置IO以及定时器4的输入捕获
void Remote_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能PORTB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE); //TIM4 时钟使能
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PB9 输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //上拉输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_9); //初始化GPIOB.9
TIM_TimeBaseStructure.TIM_Period = 10000; //设定计数器自动重装值 最大10ms溢出
TIM_TimeBaseStructure.TIM_Prescaler =(72-1); //预分频器,1M的计数频率,1us加1.
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据指定的参数初始化TIMx
TIM_ICInitStructure.TIM_Channel = TIM_Channel_4; // 选择输入端 IC4映射到TI4上
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM_ICInitStructure.TIM_ICFilter = 0x03;//IC4F=0011 配置输入滤波器 8个定时器时钟周期滤波
TIM_ICInit(TIM4, &TIM_ICInitStructure);//初始化定时器输入捕获通道
TIM_Cmd(TIM4,ENABLE ); //使能定时器4
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn; //TIM4中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; //先占优先级0级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //从优先级3级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
TIM_ITConfig( TIM4,TIM_IT_Update|TIM_IT_CC4,ENABLE);//允许更新中断 ,允许CC4IE捕获中断
}
//遥控器接收状态
//[7]:收到了引导码标志
//[6]:得到了一个按键的所有信息
//[5]:保留
//[4]:标记上升沿是否已经被捕获
//[3:0]:溢出计时器
u8 RmtSta=0; //定义一个8位的字符,8位置的含义如上
u16 Dval; //下降沿时计数器的值
u32 RmtRec=0; //红外接收到的数据
u8 RmtCnt=0; //按键按下的次数
//定时器4中断服务程序
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=RESET)
{
if(RmtSta&0x80) //上次有数据被接收到了
{
RmtSta&=~0X10; //取消上升沿已经被捕获标记
if((RmtSta&0X0F)==0X00)
RmtSta|=1<<6; //标记已经完成一次按键的键值信息采集
if((RmtSta&0X0F)<14)
RmtSta++;
else
{
RmtSta&=~(1<<7); //清空引导标识,即将最高位置清0
RmtSta&=0XF0; //清空计数器
}
}
}
if(TIM_GetITStatus(TIM4,TIM_IT_CC4)!=RESET)
{
if(RDATA) //上升沿捕获
{
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Falling); //CC4P=1 设置为下降沿捕获
TIM_SetCounter(TIM4,0); //清空定时器值
RmtSta|=0X10; //标记上升沿已经被捕获
}
else //下降沿捕获
{
Dval=TIM_GetCapture4(TIM4); //读取CCR4也可以清CC4IF标志位
TIM_OC4PolarityConfig(TIM4,TIM_ICPolarity_Rising); //CC4P=0 设置为上升沿捕获
if(RmtSta&0X10) //完成一次高电平捕获
{
if(RmtSta&0X80)//接收到了引导码
{
if(Dval>300&&Dval<800) //560为标准值,560us
{
RmtRec<<=1; //左移一位.
RmtRec|=0; //接收到0
}else if(Dval>1400&&Dval<1800) //1680为标准值,1680us
{
RmtRec<<=1; //左移一位.
RmtRec|=1; //接收到1
}else if(Dval>2200&&Dval<2600) //得到按键键值增加的信息 2500为标准值2.5ms
{
RmtCnt++; //按键次数增加1次
RmtSta&=0XF0; //清空计时器
}
}
else if(Dval>4200&&Dval<4700) //4500为标准值4.5ms
{
RmtSta|=1<<7; //标记成功接收到了引导码
RmtCnt=0; //清除按键次数计数器
}
}
RmtSta&=~(1<<4);
}
}
TIM_ClearITPendingBit(TIM4,TIM_IT_Update|TIM_IT_CC4);
}
//处理红外键盘
//返回值:
// 0,没有任何按键按下
//其他,按下的按键键值.
u8 Remote_Scan(void)
{
u8 sta=0;
u8 t1,t2;
if(RmtSta&(1<<6))//得到一个按键的所有信息了
{
t1=RmtRec>>24; //得到地址码
t2=(RmtRec>>16)&0xff; //得到地址反码
printf("t1----%d\r\n",t1);
printf("t2----%d\r\n",~t2);
printf("%i",t1==(u8)~t2);
if((t1==(u8)~t2)&&t1==REMOTE_ID)//检验遥控识别码(ID)及地址
{
t1=RmtRec>>8;
t2=RmtRec;
if(t1==(u8)~t2)
sta=t1;//键值正确
}
if((sta==0)||((RmtSta&0X80)==0))//按键数据错误/遥控已经没有按下了
{
RmtSta&=~(1<<6);//清除接收到有效按键标识
RmtCnt=0; //清除按键次数计数器
}
}
return sta;
}
HW_remote.h
#ifndef __HW_REMOTE_H
#define __HW_REMOTE_H
#include "sys.h"
#define RDATA PBin(9)//红外数据输入引脚
#define REMOTE_ID 0 //选用遥控器识别码为0.
extern u8 RmtCnt;
void Remote_Init(void); //功能引脚初始化
u8 Remote_Scan(void); //定义功能函数
#endif
main.c
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "stm32f10x.h"
#include "oled.h"
#include "HW_remote.h"
int main()
{
u8 key;
u8 demo[100];
/********************************************************************************
* Delay_init(); //本实验使用的是SysTick时钟
* CPU_TS_TmrInit(); //已经使能宏,不需要初始化
* uart1_init(115200); //串口初始化为115200,需要在usart.h中使能
* uart3_init(115200); //串口初始化为115200
********************************************************************************/
/* 初始化 */
OLED_Init();
OLED_Clear();
OLED_ShowString(30, 0, "OLED", 16); //输出字符
Remote_Init(); //红外接收初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
while(1)
{
key = Remote_Scan(); //获取按键值
if(key != 0)
{
printf("%d", key);
sprintf((char *)demo, "key:%3d ", key);
OLED_ShowString(30, 4, demo, 16); //输出字符
}
}
}
3. 编译
编译成功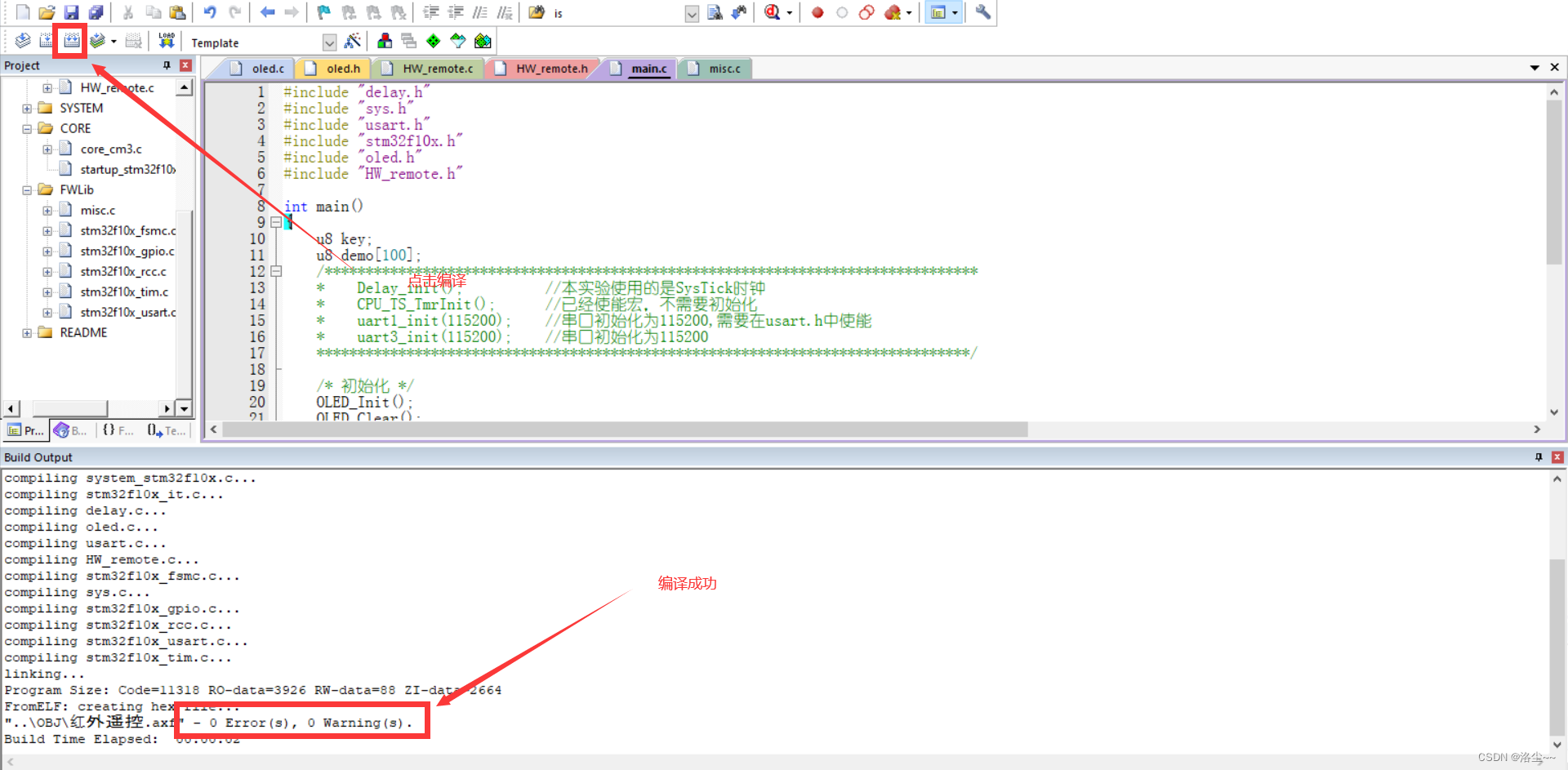
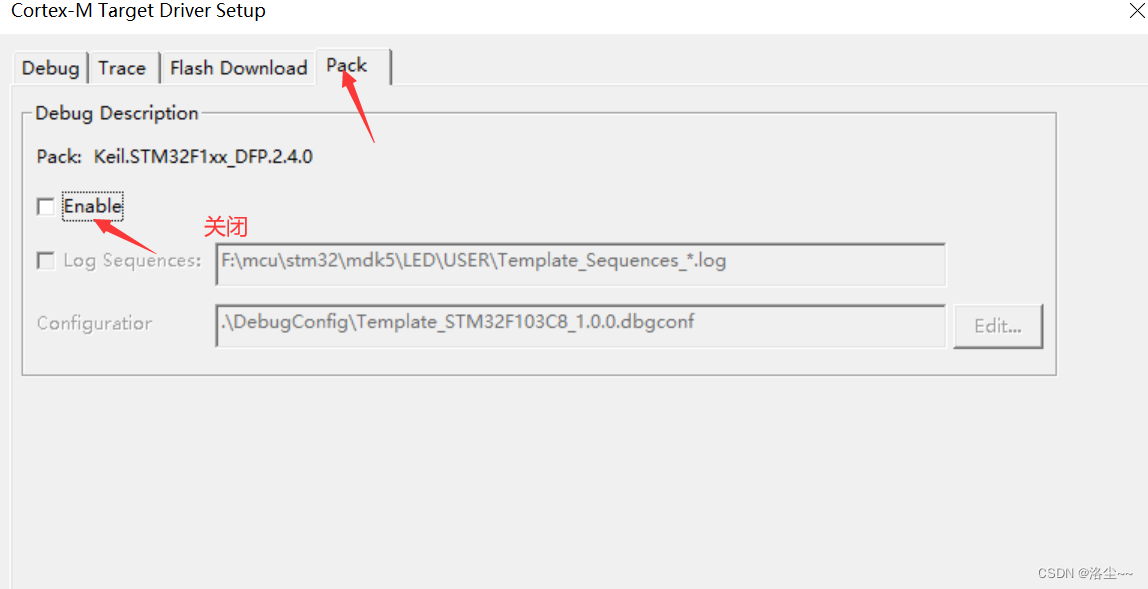
4. 选择烧录工具并配置MDK
本文选择的是ST_Link烧录工具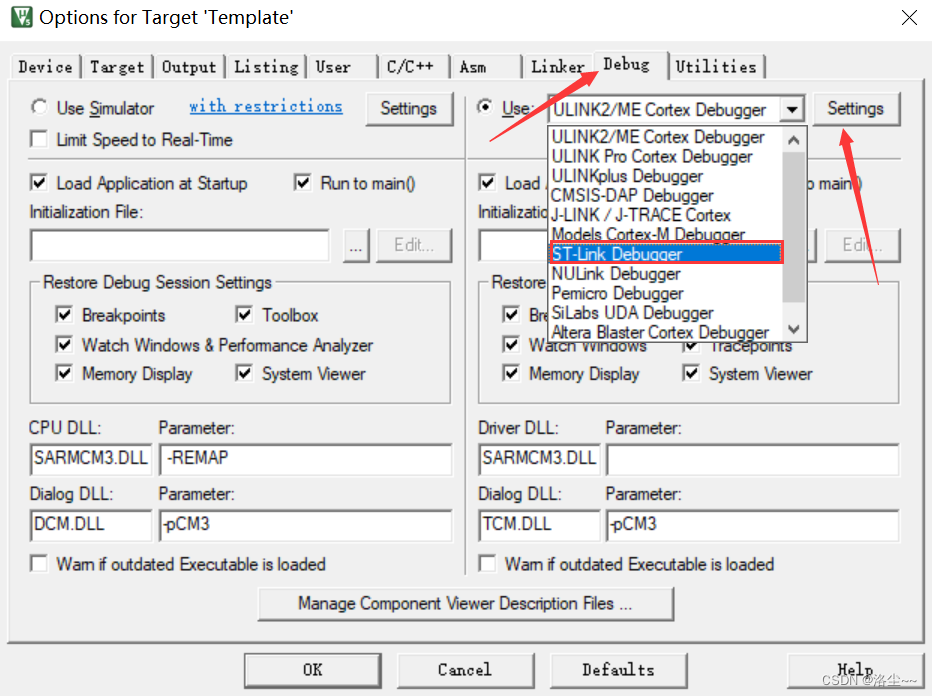

如果没有ID号看博客:ST-Link V2烧录问题(已解决)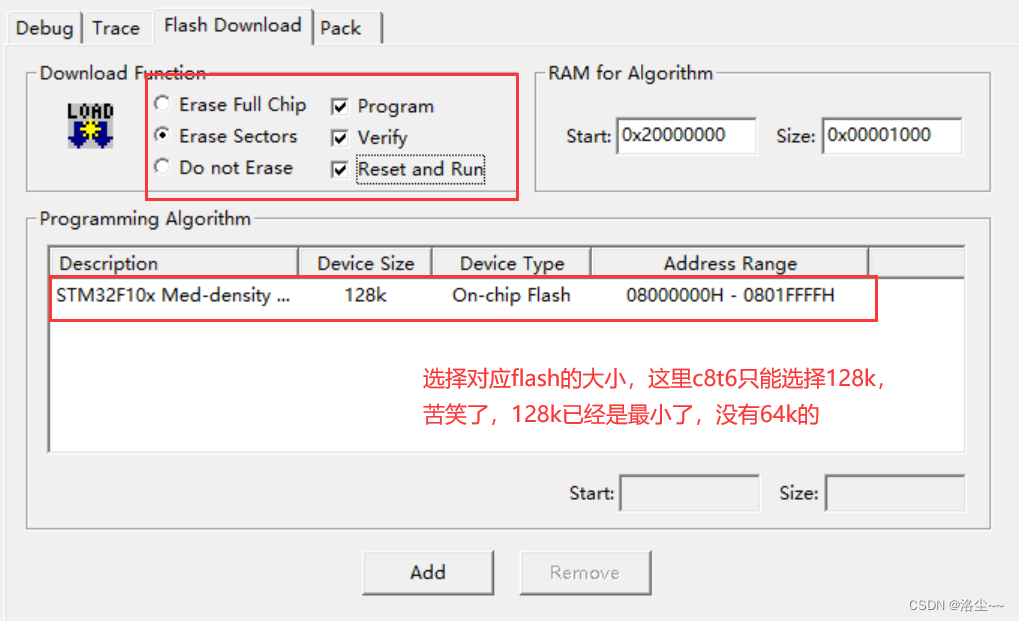
5. 成品
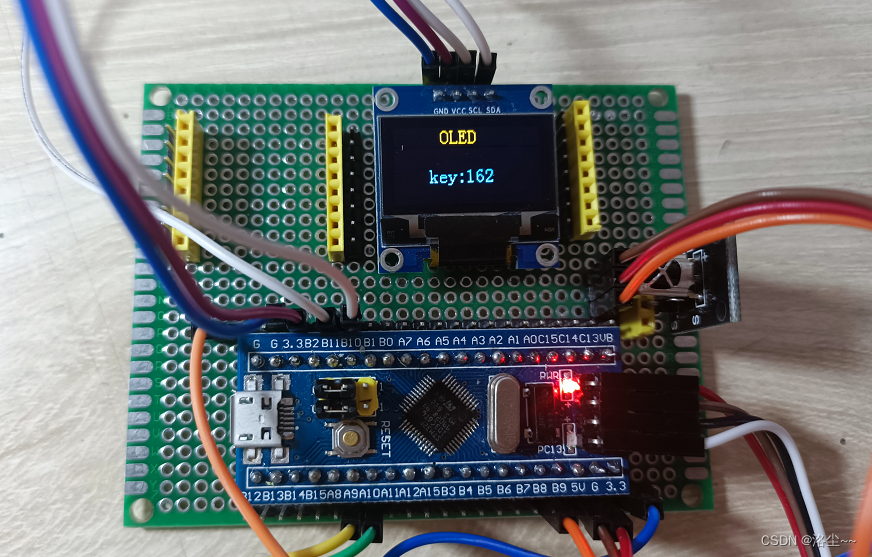
工程链接
链接:https://pan.baidu.com/s/1hU6pWutW_rp0sZIxdL4j4g 提取码:0000