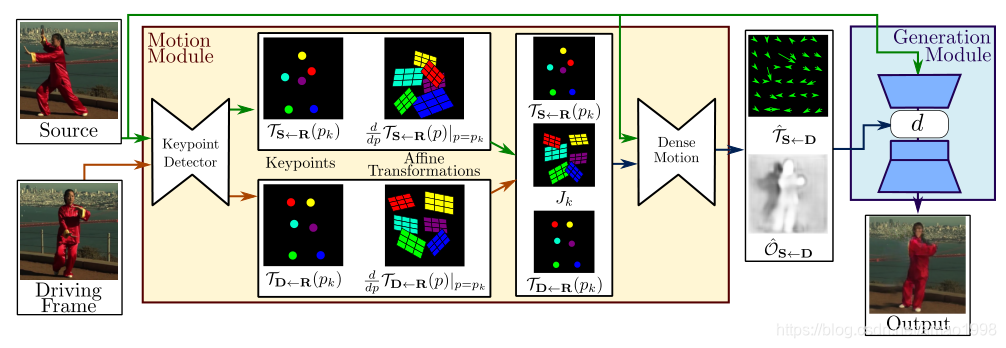
概述
先看一下模型的最后效果

目前计算机视觉的发展如火如荼,让老照片动起来让大家惊艳于计算机视觉的发展。该如何实现该功能呢?本文将一步一步的帮您实现。在阅读本文之前建议有一些基本知识。
1、泰勒公式与雅各比行列式
2、图像上下采样
3、反向光流
本文将分为几部分来完成。本章主要讲解关键点抽取模型,该模型主要为了定位关键点,将物体整体动画分解为背景(不变的)+关键点变化
模型结构
本文是关于first order motion model的pytorch具体实现
引入相关pytorch类库
from torch import nn
import torch
import torch.nn.functional as F
from imageio import imread
import numpy as np
from torchvision import models1、模型配置
dataset_params:
root_dir: data/vox-png
frame_shape: [256, 256, 3]
id_sampling: True
pairs_list: data/vox256.csv
augmentation_params:
flip_param:
horizontal_flip: True
time_flip: True
jitter_param:
brightness: 0.1
contrast: 0.1
saturation: 0.1
hue: 0.1
model_params:
common_params:
num_kp: 10
num_channels: 3
estimate_jacobian: True
kp_detector_params:
temperature: 0.1
block_expansion: 32
max_features: 1024
scale_factor: 0.25
num_blocks: 5
generator_params:
block_expansion: 64
max_features: 512
num_down_blocks: 2
num_bottleneck_blocks: 6
estimate_occlusion_map: True
dense_motion_params:
block_expansion: 64
max_features: 1024
num_blocks: 5
scale_factor: 0.25
discriminator_params:
scales: [1]
block_expansion: 32
max_features: 512
num_blocks: 4
sn: True
train_params:
num_epochs: 100
num_repeats: 75
epoch_milestones: [60, 90]
lr_generator: 2.0e-4
lr_discriminator: 2.0e-4
lr_kp_detector: 2.0e-4
batch_size: 40
scales: [1, 0.5, 0.25, 0.125]
checkpoint_freq: 50
transform_params:
sigma_affine: 0.05
sigma_tps: 0.005
points_tps: 5
loss_weights:
generator_gan: 0
discriminator_gan: 1
feature_matching: [10, 10, 10, 10]
perceptual: [10, 10, 10, 10, 10]
equivariance_value: 10
equivariance_jacobian: 10
reconstruction_params:
num_videos: 1000
format: '.mp4'
animate_params:
num_pairs: 50
format: '.mp4'
normalization_params:
adapt_movement_scale: False
use_relative_movement: True
use_relative_jacobian: True
visualizer_params:
kp_size: 5
draw_border: True
colormap: 'gist_rainbow'可以将上面的代码存储成yaml文件然后用如下代码进行读取
import yaml
with open("conf/vox-256.yaml") as f:
config = yaml.load(f,yaml.FullLoader)2、关键点抽取模型-keypoint detector
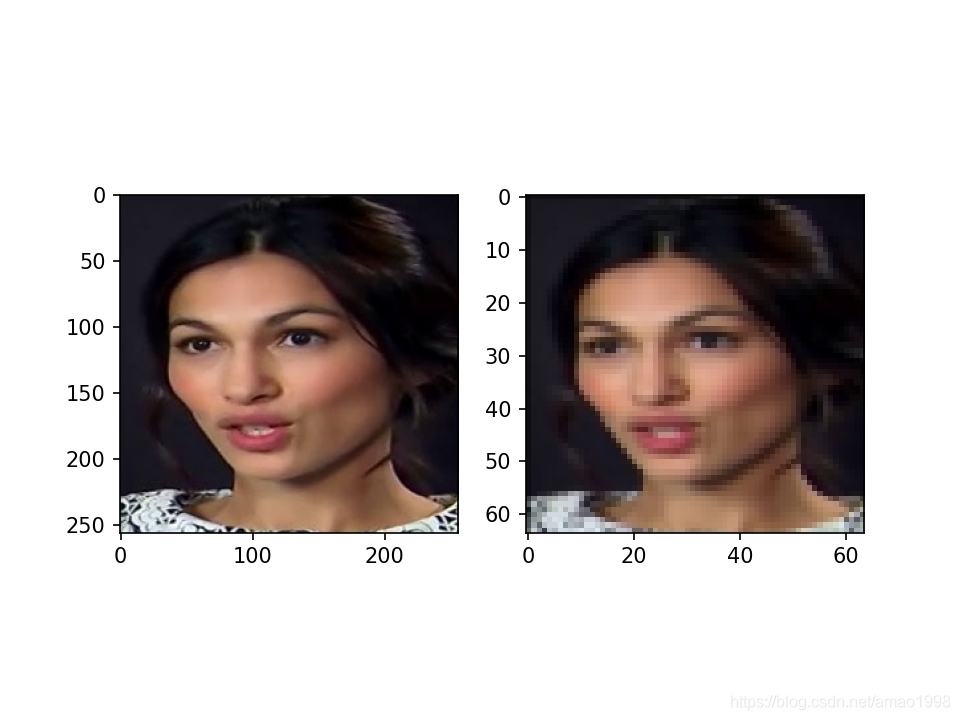
2.1 图片预处理-图片缩放
AntiAlias Interpolation 抗锯齿插值算法
在原文中默认的图像大小是 ** 256*256 ** 但考虑到运算速度在真正进行模型调试时,会采用64*64的图片进行训练,此时会使用该模型为图片进行缩放
2.1.1 AntiAliasInterpolation2d源码
class AntiAliasInterpolation2d(nn.Module):
"""
Band-limited downsampling, for better preservation of the input signal.
"""
def __init__(self, channels, scale):
super(AntiAliasInterpolation2d, self).__init__()
#
sigma = (1 / scale - 1) / 2
kernel_size = 2 * round(sigma * 4) + 1
self.ka = kernel_size // 2
self.kb = self.ka - 1 if kernel_size % 2 == 0 else self.ka
kernel_size = [kernel_size, kernel_size]
sigma = [sigma, sigma]
kernel = 1
meshgrids = torch.meshgrid(
[
torch.arange(size, dtype=torch.float32)
for size in kernel_size
]
)
for size, std, mgrid in zip(kernel_size, sigma, meshgrids):
mean = (size - 1) / 2
kernel *= torch.exp(-(mgrid - mean) ** 2 / (2 * std ** 2))
# Make sure sum of values in gaussian kernel equals 1.
kernel = kernel / torch.sum(kernel)
# Reshape to depthwise convolutional weight
kernel = kernel.view(1, 1, *kernel.size())
kernel = kernel.repeat(channels, *[1] * (kernel.dim() - 1))
self.register_buffer('weight', kernel)
self.groups = channels
self.scale = scale
inv_scale = 1 / scale
self.int_inv_scale = int(inv_scale)
def forward(self, input):
if self.scale == 1.0:
return input
out = F.pad(input, (self.ka, self.kb, self.ka, self.kb))
out = F.conv2d(out, weight=self.weight, groups=self.groups)
out = out[:, :, ::self.int_inv_scale, ::self.int_inv_scale]
return out2.1.2 AntiAliasInterpolation2d测试代码
import matplotlib.pyplot as plt
%matplotlib notebook
predictor=AntiAliasInterpolation2d(3,0.25)
imgdata=imagedata=imread('test.jpg')/255
imagedata=torch.unsqueeze(torch.tensor(imagedata,dtype=torch.float32),0)
imagedata=imagedata.permute([0,3,1,2])
x=outdata=predictor(imagedata)
figure,ax=plt.subplots(1,2)
ax[0].imshow(imgdata)
ax[1].imshow(outdata.permute([0,2,3,1])[0])输出效果如下
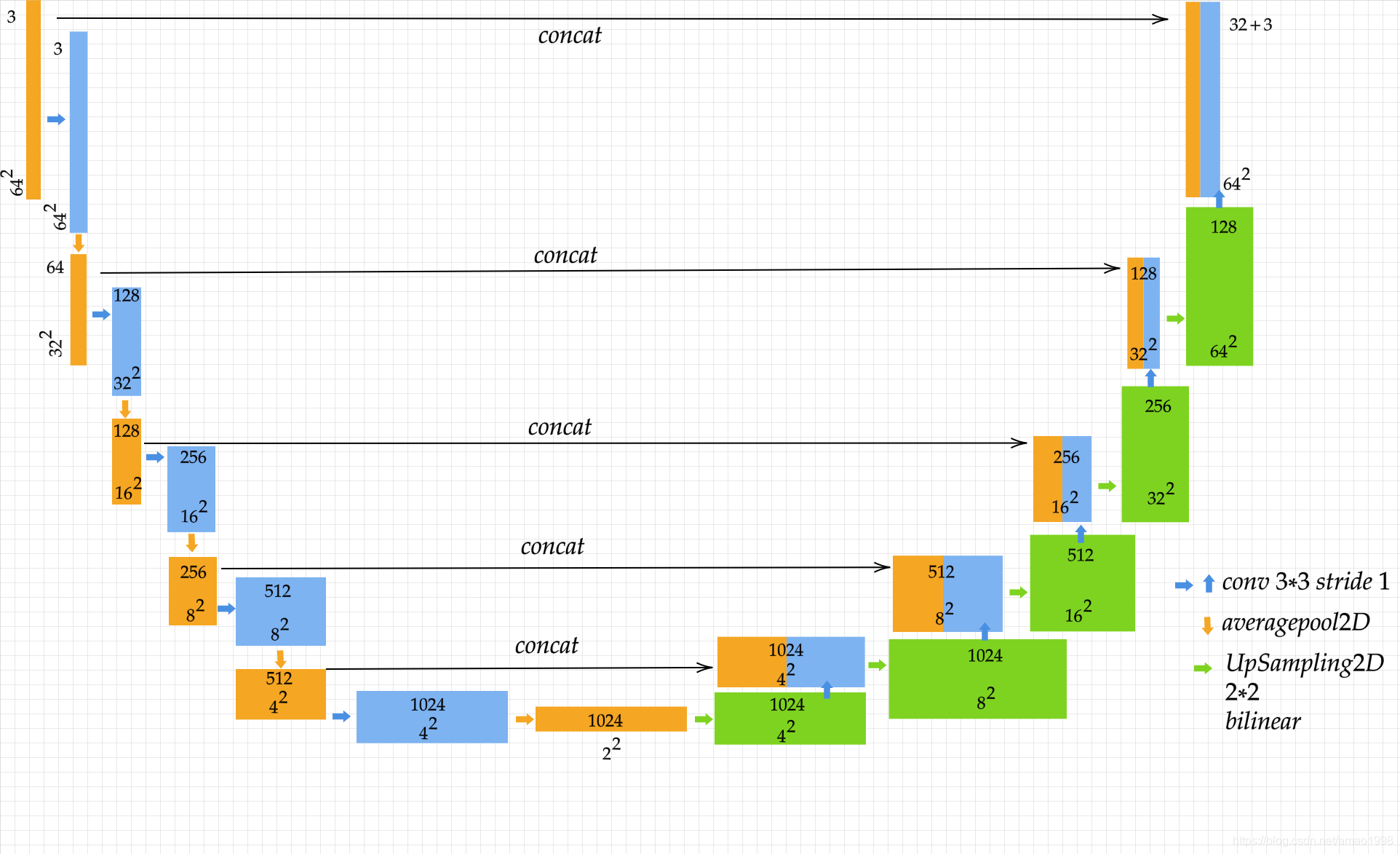
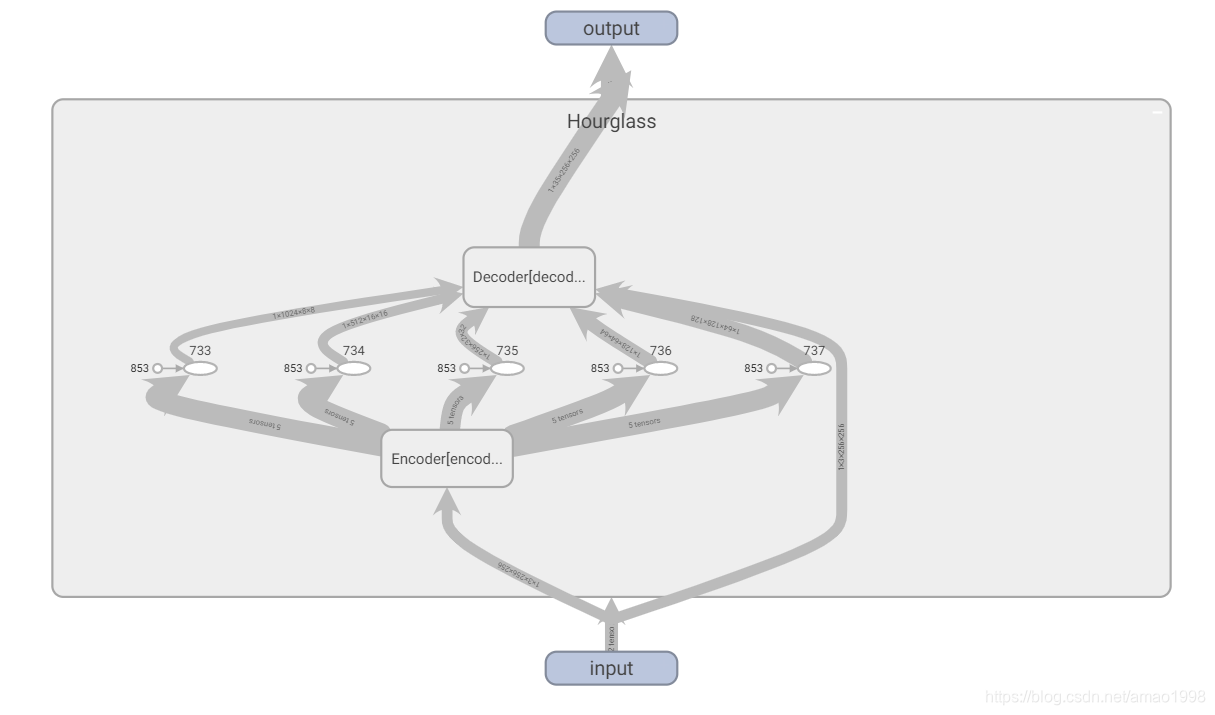
2.2 关键点特征图提取 Hourglass(沙漏)模型
- 该模型主要用来对原图与驱动图中的关键点进行抽取,模型结构如下图所示
- 注意该模型虽然称之为Hourglass模型但与相关论文中的沙漏模型是不同的他的结构更像是Unet模型的变体
- 该模型用于检测模型的原始关键点信息
2.2.1 模型相关代码
class UpBlock2d(nn.Module):
"""
Upsampling block for use in decoder.
"""
def __init__(self, in_features, out_features, kernel_size=3, padding=1, groups=1):
super(UpBlock2d, self).__init__()
self.conv = nn.Conv2d(in_channels=in_features, out_channels=out_features, kernel_size=kernel_size,
padding=padding, groups=groups)
# self.norm = BatchNorm2d(out_features, affine=True)
self.norm=torch.nn.BatchNorm2d(out_features, affine=True)
def forward(self, x):
out = F.interpolate(x, scale_factor=2)
out = self.conv(out)
out = self.norm(out)
out = F.relu(out)
return out
class DownBlock2d(nn.Module):
"""
Downsampling block for use in encoder.
"""
def __init__(self, in_features, out_features, kernel_size=3, padding=1, groups=1):
super(DownBlock2d, self).__init__()
self.conv = nn.Conv2d(in_channels=in_features, out_channels=out_features, kernel_size=kernel_size,
padding=padding, groups=groups)
# self.norm = BatchNorm2d(out_features, affine=True)
self.norm=torch.nn.BatchNorm2d(out_features, affine=True)
self.pool = nn.AvgPool2d(kernel_size=(2, 2))
def forward(self, x):
out = self.conv(x)
out = self.norm(out)
out = F.relu(out)
out = self.pool(out)
return out
class Encoder(nn.Module):
"""
Hourglass Encoder
"""
def __init__(self, block_expansion, in_features, num_blocks=3, max_features=256):
super(Encoder, self).__init__()
down_blocks = []
for i in range(num_blocks):
down_blocks.append(DownBlock2d(in_features if i == 0 else min(max_features, block_expansion * (2 ** i)),
min(max_features, block_expansion * (2 ** (i + 1))),
kernel_size=3, padding=1))
self.down_blocks = nn.ModuleList(down_blocks)
def forward(self, x):
outs = [x]
for down_block in self.down_blocks:
outs.append(down_block(outs[-1]))
return outs
class Decoder(nn.Module):
"""
Hourglass Decoder
"""
def __init__(self, block_expansion, in_features, num_blocks=3, max_features=256):
super(Decoder, self).__init__()
up_blocks = []
for i in range(num_blocks)[::-1]:
in_filters = (1 if i == num_blocks - 1 else 2) * min(max_features, block_expansion * (2 ** (i + 1)))
out_filters = min(max_features, block_expansion * (2 ** i))
up_blocks.append(UpBlock2d(in_filters, out_filters, kernel_size=3, padding=1))
self.up_blocks = nn.ModuleList(up_blocks)
self.out_filters = block_expansion + in_features
def forward(self, x):
out = x.pop()
for up_block in self.up_blocks:
out = up_block(out)
skip = x.pop()
out = torch.cat([out, skip], dim=1)
return out
class Hourglass(nn.Module):
"""
Hourglass architecture.
"""
def __init__(self, block_expansion, in_features, num_blocks=3, max_features=256):
super(Hourglass, self).__init__()
self.encoder = Encoder(block_expansion, in_features, num_blocks, max_features)
self.decoder = Decoder(block_expansion, in_features, num_blocks, max_features)
self.out_filters = self.decoder.out_filters
def forward(self, x):
return self.decoder(self.encoder(x))
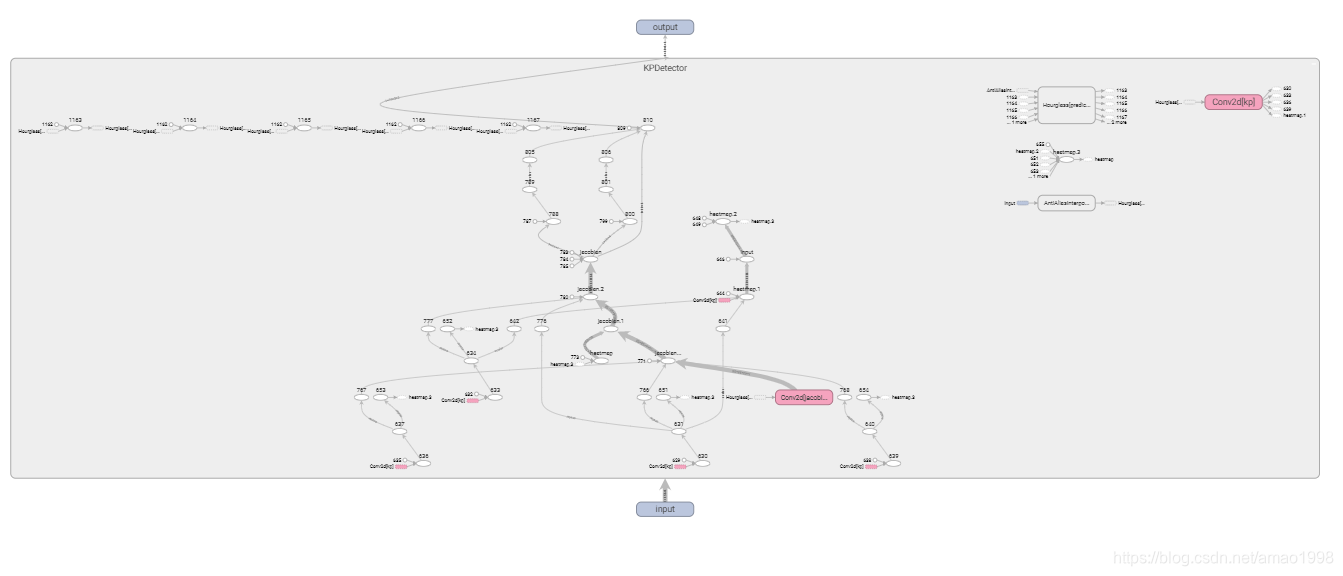
2.2.2 使用tensorboard可视化模型¶
在交互式模型下可以将hourglass模型再展开,看到具体的模型结构以确定模型与设计是否相同
注意
原论文中使用的batchnormal2d不是pytorch框架自带的。因为再分布式计算的情况下,每一个设备的batchnormal操作并不是针对所有数据,而是运行在
本设备上的数据所以采用了第三方的代码 Synchronized-BatchNorm-PyTorch,其代码链接如下 https://github.com/vacancy/Synchronized-BatchNorm-PyTorch
2.3 抽取10个关键点数据
- hourglass 是获取图像关键点特征图的关键模型,通过该模型可以有效抽取所有关键点的特征图,此时我们假定我们需要10个最主要的关键点
- 可以通过一个卷积层抽取10个关键点,同时对其进行softmax操作对其权重进行排序
2.3.1 关键代码与测试代码
kp = nn.Conv2d(in_channels=predictor.out_filters, out_channels=10, kernel_size=(7, 7),padding=0)
feature_map = predictor(x)
prediction = kp(feature_map)
final_shape = prediction.shape
heatmap = prediction.view(final_shape[0], final_shape[1], -1)
heatmap = F.softmax(heatmap / 0.1, dim=2)
heatmap = heatmap.view(*final_shape)2.3.2 创建本地归一化坐标系(R)获取高斯置信图¶
- 该函数根据指定的高与宽创建一个网格(mesh grid)
- 该网格在-1 与 1 之间均与分布
- 首先使用linspace生成网格坐标点
- 将坐标点转化到-1到+1的均匀分布
- 填充网格点生成坐标
创建归一化坐标系
def make_coordinate_grid(spatial_size, type):
"""
Create a meshgrid [-1,1] x [-1,1] of given spatial_size.
"""
h, w = spatial_size
x = torch.arange(w).type(type)
y = torch.arange(h).type(type)
x = (2 * (x / (w - 1)) - 1)
y = (2 * (y / (h - 1)) - 1)
yy = y.view(-1, 1).repeat(1, w)
xx = x.view(1, -1).repeat(h, 1)
meshed = torch.cat([xx.unsqueeze_(2), yy.unsqueeze_(2)], 2)
return meshed
def gaussian2kp(heatmap):
"""
Extract the mean and from a heatmap
"""
shape = heatmap.shape
heatmap = heatmap.unsqueeze(-1)
grid = make_coordinate_grid(shape[2:], heatmap.type()).unsqueeze_(0).unsqueeze_(0)
value = (heatmap * grid).sum(dim=(2, 3))
kp = {'value': value}
return kp
out = gaussian2kp(heatmap)输出效果如下
{'value': tensor([[[-0.4011, -0.4888], [-0.5129, 0.3301], [ 0.0890, -0.1418], [-0.0375, 0.1512], [-0.0831, -0.0603], [-0.4330, 0.4204], [ 0.0383, 0.0883], [-0.2365, 0.4034], [-0.1921, 0.3863], [-0.4409, -0.3465]]], grad_fn=<SumBackward1>)}
- 相关原理说明
- 该函数是用来进行关键点定位,通过10个conv对hourglass输出(featuremap)进行变化,生成了10个关键点的未知信息,每个关键点的为58*58
- 对58*58进行进行argmax操作即可获得该关键点的坐标但由于argmax不可导所以引入soft-argmax概念并通过在宽高方向上的softmax操作来进行
请参考如下代码,帮助理解
- 伪造一个特征点
- 在宽高方向上进行softmax操作
- 可视化该图形
# 伪造特征点
kp_test_data=torch.ones([2,2])
kp_test_data=nn.functional.pad(kp_test_data,[46,10,20,36])
figure=plt.figure(figsize=(4,4))
plt.imshow(kp_test_data,cmap='gray')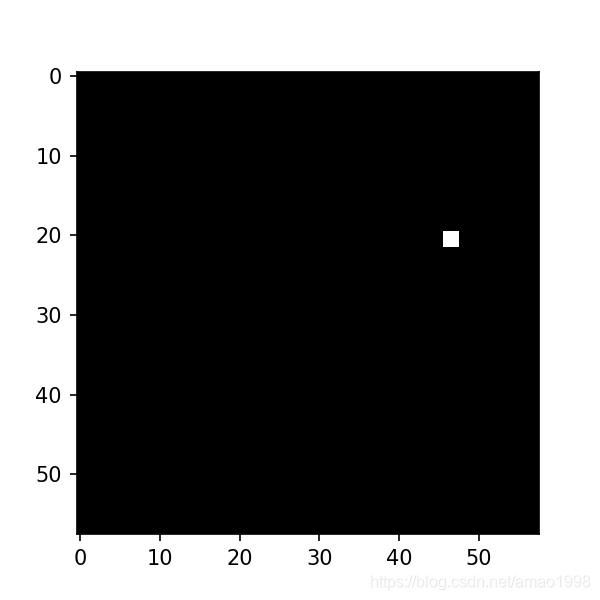
# 观察置信图分布
x=y=np.arange(0,58)
X,Y=np.meshgrid(x,y)
figure=plt.figure(figsize=(5,4))
ax3d=figure.add_subplot(projection='3d')
ax3d.plot_surface(X, Y, kp_test_data.numpy(), rstride=1, cstride=1, cmap=plt.get_cmap('rainbow'))
ax3d.set_xlabel('x')
ax3d.set_ylabel('y')
ax3d.set_zlabel('z')
plt.show()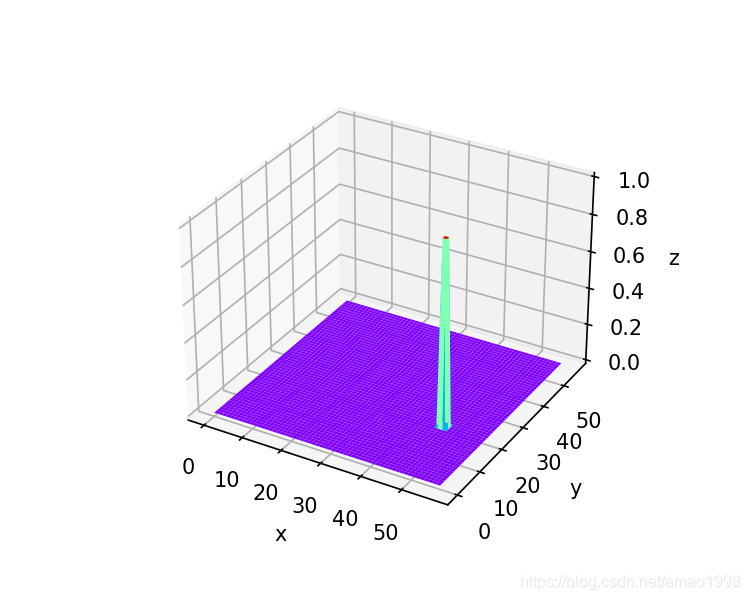
- 进行softmax之后的输出
- 注意如果想在一个平面上进行softmax则整个维度必须大于3否在便只能在行或者列上进行softmax
- 所以将图像数据转化到pytorch标准的4维格式[batch,chanel,heigth,width]
- 注意将原始数据放大10倍对结果观察十分重要
#修正维度
rowdata=kp_test_data.view(-1).unsqueeze(0).unsqueeze(0)
softmax_rawdata=F.softmax(rowdata / 0.1, dim=2).view(1,1,58,58)
x=y=np.arange(0,58)
X,Y=np.meshgrid(x,y)
figure=plt.figure(figsize=(5,4))
ax3d=figure.add_subplot(projection='3d')
ax3d.plot_surface(X, Y, softmax_rawdata.view([58,58]).numpy(), rstride=1, cstride=1, cmap=plt.get_cmap('rainbow'))
ax3d.set_xlabel('x')
ax3d.set_ylabel('y')
ax3d.set_zlabel('z')
plt.show()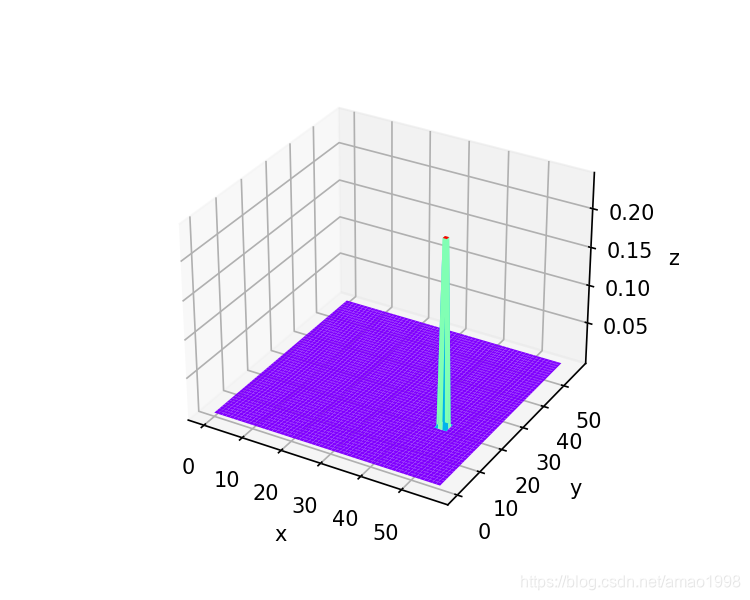
- 观察应用网格之后的效果
- 可以看到关键点坐标系从-1 到 1 两个值大致说明了关键点的坐标,具体看下面代码
grid = make_coordinate_grid([58,58], torch.float32)
heatmap1=softmax_rawdata.view([58,58,1])
landmark=(heatmap1 * grid).view([2,58,58])
value = landmark.sum(dim=(1, 2))
print(value)此时输出
tensor([0.3286, 0.0094])可以看到x坐标明显靠右,y坐标靠近中间,他们的相对位置与原图基本一致
2.3 获得变换矩阵雅各比矩阵(行列式)
- 对R映射到X的变换在??pk点进行泰勒公式的一阶展开,结果如下
则
为雅各比行列式,详细描述为 函数在 ??pk 点的导数
在二维空间中雅各比行列式则由4个参数构成
- 所以为获取雅各比矩阵我们对原始的关键点特征图应用4*40个卷积层,而卷积层的初始化采用恒等变换的方式
- 这种初始化方式是将权重置为0 将偏置置为单位阵。这样原始的雅各比矩阵就是单位阵,使用单位阵变换原始特征图则不发生任何变化
- 相关源码如下
init:
self.jacobian = nn.Conv2d(in_channels=self.predictor.out_filters,out_channels=4 * 10, kernel_size=(7, 7), padding=0)
self.jacobian.weight.data.zero_()
self.jacobian.bias.data.copy_(torch.tensor([1, 0, 0, 1] * self.num_jacobian_maps, dtype=torch.float))forward:
if self.jacobian is not None:
jacobian_map = self.jacobian(feature_map)
jacobian_map = jacobian_map.reshape(final_shape[0], self.num_jacobian_maps, 4, final_shape[2],
final_shape[3])
heatmap = heatmap.unsqueeze(2)
# 根据关键点heatmap的权重来设置雅各比行列式的重要性
jacobian = heatmap * jacobian_map
jacobian = jacobian.view(final_shape[0], final_shape[1], 4, -1)
jacobian = jacobian.sum(dim=-1)
jacobian = jacobian.view(jacobian.shape[0], jacobian.shape[1], 2, 2)
out['jacobian'] = jacobian
2.4 模型完整代码KPDetector
class KPDetector(nn.Module):
"""
Detecting a keypoints. Return keypoint position and jacobian near each keypoint.
"""
def __init__(self, block_expansion, num_kp, num_channels, max_features,
num_blocks, temperature, estimate_jacobian=False, scale_factor=1,
single_jacobian_map=False, pad=0):
super(KPDetector, self).__init__()
self.predictor = Hourglass(block_expansion, in_features=num_channels,
max_features=max_features, num_blocks=num_blocks)
self.kp = nn.Conv2d(in_channels=self.predictor.out_filters, out_channels=num_kp, kernel_size=(7, 7),
padding=pad)
if estimate_jacobian:
self.num_jacobian_maps = 1 if single_jacobian_map else num_kp
self.jacobian = nn.Conv2d(in_channels=self.predictor.out_filters,
out_channels=4 * self.num_jacobian_maps, kernel_size=(7, 7), padding=pad)
self.jacobian.weight.data.zero_()
self.jacobian.bias.data.copy_(torch.tensor([1, 0, 0, 1] * self.num_jacobian_maps, dtype=torch.float))
else:
self.jacobian = None
self.temperature = temperature
self.scale_factor = scale_factor
if self.scale_factor != 1:
self.down = AntiAliasInterpolation2d(num_channels, self.scale_factor)
def gaussian2kp(self, heatmap):
"""
Extract the mean and from a heatmap
"""
shape = heatmap.shape
heatmap = heatmap.unsqueeze(-1)
grid = make_coordinate_grid(shape[2:], heatmap.type()).unsqueeze_(0).unsqueeze_(0)
value = (heatmap * grid).sum(dim=(2, 3))
kp = {'value': value}
return kp
def forward(self, x):
if self.scale_factor != 1:
x = self.down(x)
feature_map = self.predictor(x)
prediction = self.kp(feature_map)
final_shape = prediction.shape
heatmap = prediction.view(final_shape[0], final_shape[1], -1)
heatmap = F.softmax(heatmap / self.temperature, dim=2)
heatmap = heatmap.view(*final_shape)
out = self.gaussian2kp(heatmap)
if self.jacobian is not None:
jacobian_map = self.jacobian(feature_map)
jacobian_map = jacobian_map.reshape(final_shape[0], self.num_jacobian_maps, 4, final_shape[2],
final_shape[3])
heatmap = heatmap.unsqueeze(2)
jacobian = heatmap * jacobian_map
jacobian = jacobian.view(final_shape[0], final_shape[1], 4, -1)
jacobian = jacobian.sum(dim=-1)
jacobian = jacobian.view(jacobian.shape[0], jacobian.shape[1], 2, 2)
out['jacobian'] = jacobian
return out
# return out['jacobian'] 模型测试代码如下
imgdata=imagedata=imread('test.jpg')/255
imagedata=torch.unsqueeze(torch.tensor(imagedata,dtype=torch.float32),0)
x_data=imagedata.permute([0,3,1,2])
print(x_data.shape)
kp_detector = KPDetector(**config['model_params']['kp_detector_params'],
**config['model_params']['common_params'])使用tensorboard观察模型结构