


为了改善系统的动态性能和稳态性能,我们常在在系统中加入一些参数可调整的装置(称作装置),以便调整系统结构,进一步提高系统的性能,使系统能够满足性能指标要求,这就是系统校正。
按校正装置在系统中的位置不同,系统校正分为串联校正,反馈校正和复合校正。
根据校正装置的特性又可分为超前校正,滞后校正,滞后-超前校正。
系统校正的实质都是表现为修改描述系统运动规律的数学模型。设计校正装置的过程是一个多次试探的过程并带有许多经验。
线性系统的基本控制规律比例(P)、积分(I)、比例-微分(PD)、比例-积分(PI)和比例-积分-微分(PID)控制规律。超前校正,滞后校正,滞后-超前校正,用校正装置的不同特性改善系统的动态特性和稳态特性。
一、 概 述
系统的性能指标,按其类型可以分为:
(1) 时域性能指标,包括稳态性能指标和动态性能指标;
(2) 频域性能指标,包括开环频域指标和闭环频域指标;
1. 时域性能指标
评价控制系统优劣的性能指标,一般是根据系统在典型输入下输出响应的某些特征点规定的。常用的时域指标有:
(1) 稳态指标 静态位置误差系数Kp 静态速度误差系数Kv 静态加速度误差系数Ka 稳态误差ess
(2) 动态指标
上升时间tr峰值时间tp 调整时间ts 最大超调量(或最大百分比超调量) Mp 振荡次数N
2. 频域性能指标
(1) 开环频域指标 开环截止频率ωc (rad/s) ;相角裕量γ(°) ;幅值裕量Kg。
(2) 闭环频域指标
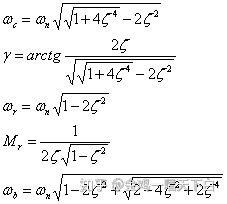
一般应对闭环频率特性提出要求,例如给出闭环频率特性曲线,并给出闭环频域指标如下:谐振频率ωr ;谐振峰值 Mr 。
闭环截止频率ωb与闭环带宽0~ωb :
一般规定A(ω)由A(0)下降到-3dB时的频率,亦即A(ω)由A(0)下降到0.707 A(0)时的频率叫作系统的闭环截止频率。频率由0~ ωb的范围称为系统的闭环带宽。
各类性能指标是从不同的角度表示系统的性能,它们之间存在必然的内在联系。对于二阶系统,时域指标和频域指标之间能用准确的数学式子表示出来。它们可统一采用阻尼比ζ和无阻尼自然振荡频率ωn来描述,如所示。
2.系统的校正
进行系统校正就要选择合适的、合理的性能指标,切忌贪大求全、不切实际。要搞清楚重点指标要求、照顾到各项指标要求。
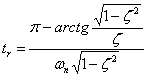
校正装置的形式及它们和系统其它部分的联接方式,称为系统的校正方式。校正方式可以分为串联校正、反馈(并联)校正、前置校正和干扰补偿等。串联校正和并联校正是最常见的两种校正方式。
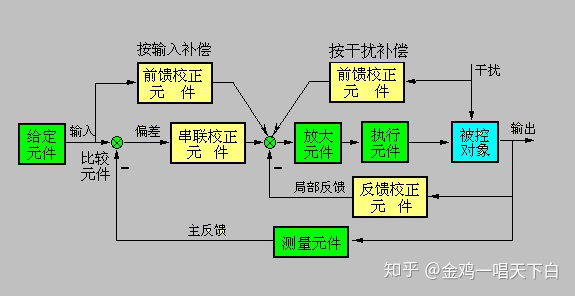
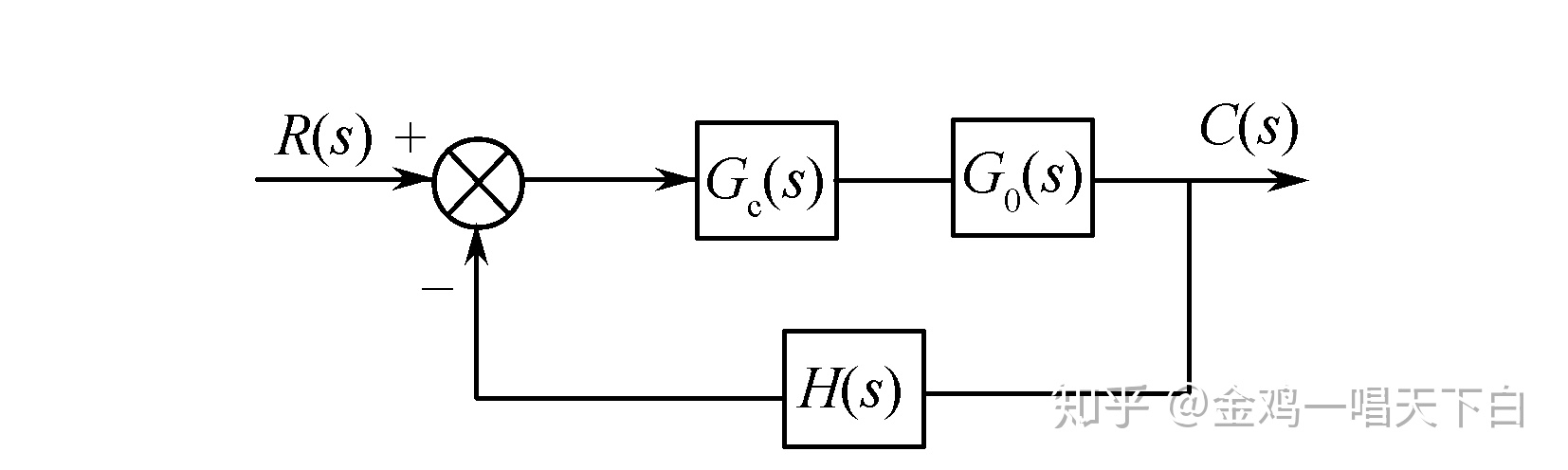
1. 串联校正
校正装置
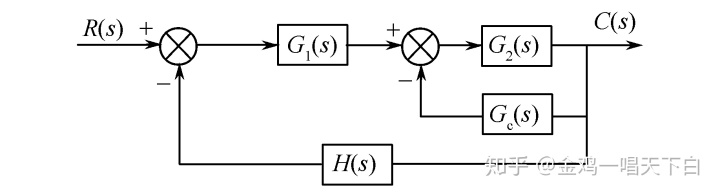
2.反馈校正(并联校正)
校正装置
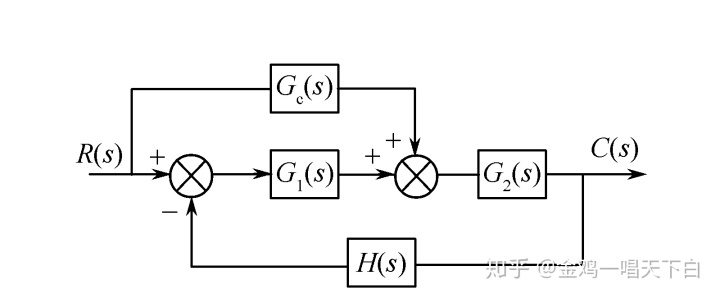
3. 前置校正
前置校正又称为前馈校正,是在系统反馈回路之外采用的一种校正方式,如图3所示。
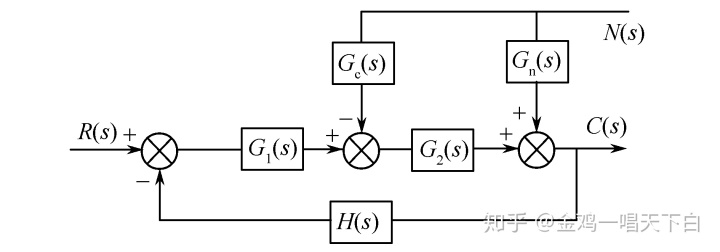
4. 干扰补偿
干扰补偿装置Gc(s)直接或间接测量干扰信号n(t),并经变换后接入系统,形成一条附加的、对干扰的影响进行补偿的通道,如图4所示。
根据校正装置的特性,校正装置可分为超前校正装置、滞后校正装置和滞后-超前校正装置。
(1) 超前校正装置
校正装置输出信号在相位上超前于输入信号,即校正装置具有正的相角特性,这种校正装置称为超前校正装置,对系统的校正称为超前校正。
(2) 滞后校正装置
校正装置输出信号在相位上落后于输入信号,即校正装置具有负的相角特性,这种校正装置称为滞后校正装置,对系统的校正称为滞后校正。
(3) 滞后-超前校正装置
若校正装置在某一频率范围内具有负的相角特性,而在另一频率范围内却具有正的相角特性,这种校正装置称滞后-超前校正装置,对系统的校正称为滞后-超前校正。
二、线性系统的基本控制规律
校正装置中最常用的是PID控制规律。PID控制是比例积分微分控制的简称。在科学技术特别是电子计算机迅速发展的今天,涌现出许多新的控制方法,但PID由于它自身的优点仍然是得到最广泛应用的基本控制规律。 PID控制具有以下优点:
(1) 原理简单,使用方便;
(2) 适应性强, 按PID控制规律进行工作的控制器早已商品化,即使目前最新式的过程控制计算机,其基本控制功能也仍然是PID控制;
(3) 鲁棒性强,即其控制品质对被控制对象特性的变化不大敏感。
在控制系统的设计与校正中,PID控制规律的优越性是明显的,它的基本原理却比较简单。基本PID控制规律可描述为
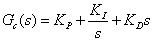
这里 KP 、KI 、KD 为常数。设计者的问题是如何恰当地组合这些元件或环节,确定连接方式以及它们的参数,以便使系统全面满足所要求的性能指标。
1.比例(P)控制作用
比例控制器的传递函数为

式中, KP 称为比例系数或增益(视情况可设置为正或负)。系统的特征方程
2.比例微分(PD)控制作用
比例微分控制的传递函数为
式中, KD称为微分增益。采用比例微分(PD)校正二阶系统的结构框图如图6所示。
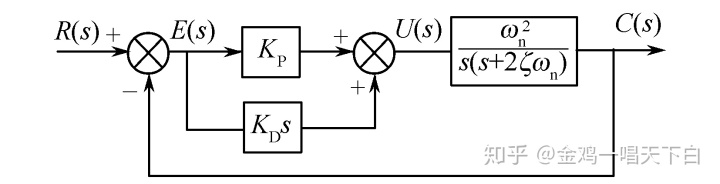
控制器的输出信号
微分控制反映误差的变化率,只有当误差随时间变化时,微分作用才会对系统起作用,而对无变化或缓慢变化的对象不起作用,因此微分控制在任何情况下不能单独地与被控对象串联使用,而只能构成PD或PID控制。另外,微分控制有放大噪声信号的缺点。
3.积分(I)控制作用
积分控制的传递函数

PI控制器的传递函数为

4.比例积分微分(PID)控制作用
PID控制器是比例、积分、微分三种控制作用的叠加,又称为比例-微分-积分校正,其传递函数可表示为
实际工业中PID控制器的传递函数为
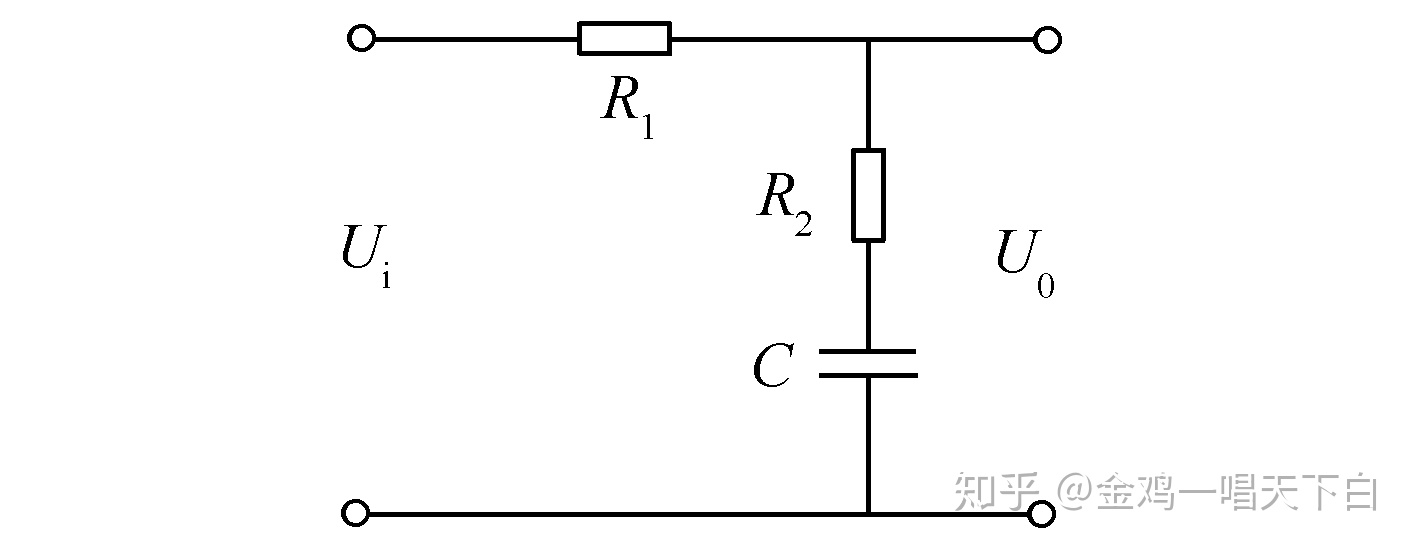
三、校正装置及其特性
1.超前校正装置
另外从校正装置的表达式来看,采用无源相位超前校正装置时,系统的开环增益要下降a倍,为了补偿超前网络带来的幅值衰减,通常在采用无源RC超前校正装置的同时串入一个放大倍数Kc=1/a的放大器。超前校正网络加放大器后,校正装置的传递函数
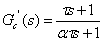
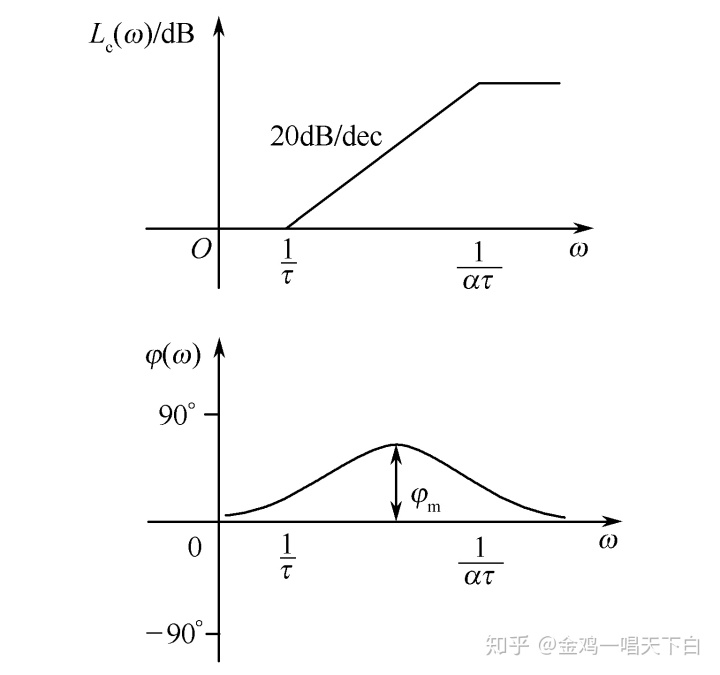
相频曲线具有正相角,即网络的稳态输出在相位上超前于输入,故称为超前校正网络。超前网络产生的超前相角为

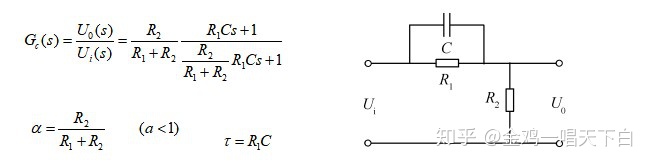
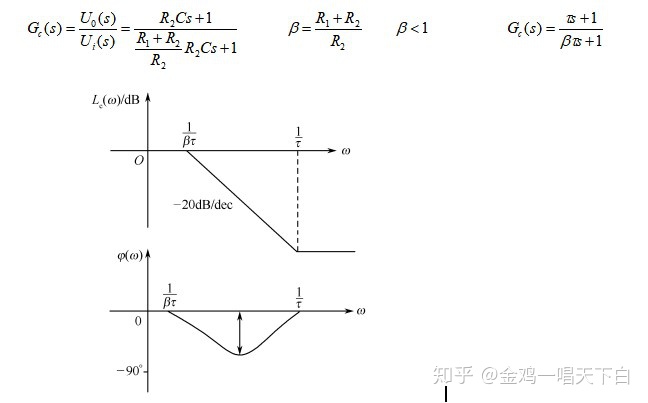
2.滞后校正装置
校正装置的相频曲线具有负相角,这表明,网络在正弦信号作用下的稳态输出在相位上滞后于输入,故称为滞后网络。
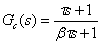
从对数频率特性看,滞后校正装置是一个低通滤波器,且β值愈大,抑制高频噪声的能力愈强,滞后校正装置主要是利用其高频衰减特性。对于高精度,而快速性要求不高的系统常采用滞后校正,如恒温控制等。
3.滞后-超前校正装置
其传递函数为

且设分母多项式分解为两个一次式,时间常数取为T1 、T2 ,则上式可写成
式中,
频率特性
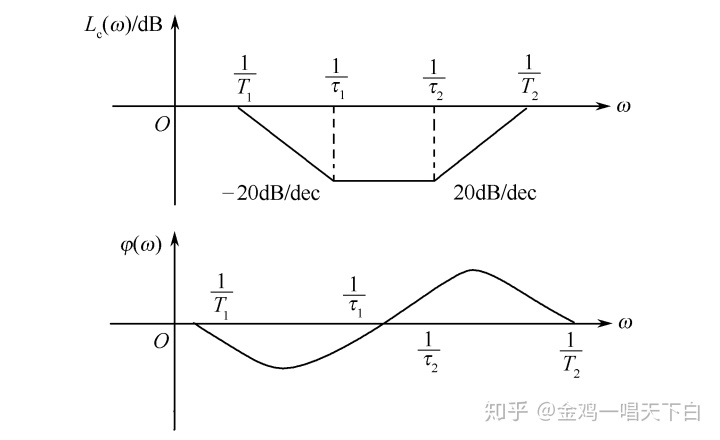
网络的对数频率特性曲线如图所示。可以看出,曲线低频段具有负相角,起滞后校正作用,高频段具有正相角,起超前校正作用。故称滞后—超前校正装置。
注:版权属笔者所有,如需转载请务必联系!
最后说一句:码字不易,若此文对你有启发,收藏前请点个赞、点点喜欢,是对知乎主莫大的支持!!
参考
1.^文中内容或图片如有侵犯您的权益,请联系作者删除。