海森矩阵(Hessian Matrix)
Key Words: Hessian Matrix, second order derivatives, convexity, and saddle points
原文链接:Hessian, second order derivatives, convexity, and saddle points
翻译:
Hessian Matrix:二阶导和函数曲率
回忆一下f ff的梯度 f : R n → R f:\mathbb{R}^n \rightarrow \mathbb{R}f:Rn→R:
f ′ ( x ) = [ δ f δ x 1 , δ f δ x 2 , ⋯ , δ f δ x n ] (1) f'(x) = [\frac{\delta f}{\delta x_1}, \frac{\delta f}{\delta x_2}, \cdots, \frac{\delta f}{\delta x_n} ]\tag{1}f′(x)=[δx1δf,δx2δf,⋯,δxnδf](1)
求f ff的二阶导意味着,我们可以看到第i ii个一阶导δ f δ x i \frac{\delta f}{\delta x_i}δxiδf是如何影响其他所有偏导数的。求二阶导相当于求f ′ ( x ) f'(x)f′(x)的Jacobian矩阵,结果如公式(2)所示。
H = [ ∂ 2 f ∂ x 1 2 ∂ 2 f ∂ x 1 ∂ x 2 ⋯ ∂ 2 f ∂ x 1 ∂ x n ∂ 2 f ∂ x 2 ∂ x 1 ∂ 2 f ∂ x 2 2 ⋯ ∂ 2 f ∂ x 2 ∂ x n ⋮ ⋮ ⋱ ⋮ ∂ 2 f ∂ x n ∂ x 1 ∂ 2 f ∂ x n ∂ x 2 ⋯ ∂ 2 f ∂ x n 2 ] (2) H=\left[\begin{array}{cccc}{\frac{\partial^{2} f}{\partial x_{1}^{2}}} & {\frac{\partial^{2} f}{\partial x_{1} \partial x_{2}}} & {\cdots} & {\frac{\partial^{2} f}{\partial x_{1} \partial x_{n}}} \\ {\frac{\partial^{2} f}{\partial x_{2} \partial x_{1}}} & {\frac{\partial^{2} f}{\partial x_{2}^{2}}} & {\cdots} & {\frac{\partial^{2} f}{\partial x_{2} \partial x_{n}}} \\ {\vdots} & {\vdots} & {\ddots} & {\vdots} \\ {\frac{\partial^{2} f}{\partial x_{n} \partial x_{1}}} & {\frac{\partial^{2} f}{\partial x_{n} \partial x_{2}}} & {\cdots} & {\frac{\partial^{2} f}{\partial x_{n}^{2}}}\end{array}\right]\tag{2}H=⎣⎢⎢⎢⎢⎢⎡∂x12∂2f∂x2∂x1∂2f⋮∂xn∂x1∂2f∂x1∂x2∂2f∂x22∂2f⋮∂xn∂x2∂2f⋯⋯⋱⋯∂x1∂xn∂2f∂x2∂xn∂2f⋮∂xn2∂2f⎦⎥⎥⎥⎥⎥⎤(2)
海森矩阵体现了不同输入维之间相互加速的速率。e.g.:如果H 1 , 1 H_{1,1}H1,1 is high,这表明维度1的加速度较高。如果H 1 , 2 H_{1,2}H1,2 is high,那么我们在两个维度上均同时加速。如果H 1 , 2 H_{1,2}H1,2 是负的,那么当第一个维度加速时,第二个维度在减速。
海森 & 机器学习
在机器学习中的梯度下降法中,二阶导数测量的是损失函数的曲率,而不是单坐标处的斜率(梯度)。因此,有关海森的信息可以帮助我们采取合适的步长,以达到最小。
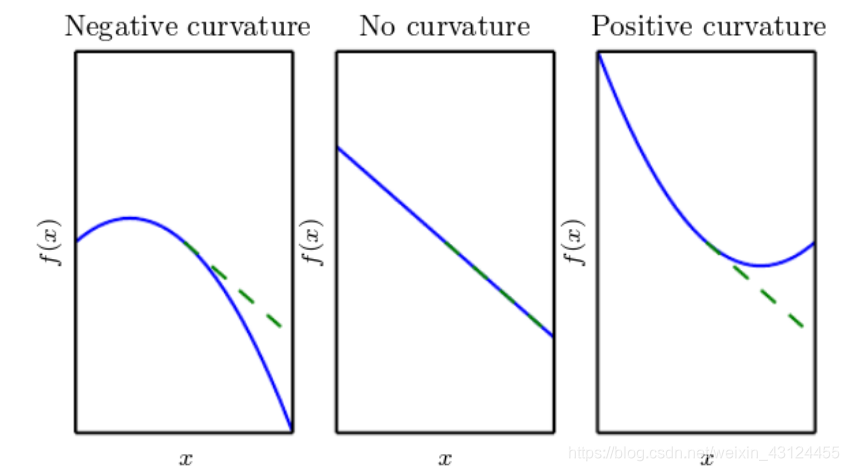
假定我们有一个代价函数f ff,它的梯度f ′ ( x ) < 0 f'(x)<0f′(x)<0。我们知道f ff在负梯度方向会下降,但不知道的是1)下降速率越来越快? 2)以不变的速率下降?还是 3)下降得很少,且可能上升?这些信息可以通过求二阶导——Hessian Matrix来了解。
- 图1:f ′ ′ ( x ) < 0 f''(x)<0f′′(x)<0,则f ff加速下降,最终代价函数的下降幅度将大于梯度乘以步长
- 图2:f ′ ′ ( x ) = 0 f''(x)=0f′′(x)=0,函数是一条直线,没有曲率,那么以步长α \alphaα沿着负梯度前进,f ff就减少c . α . c. \alpha .c.α.
- 图3:f ′ ′ ( x ) > 0 f''(x)>0f′′(x)>0,函数会减速下降,最后会加速上升。因此如果α \alphaα太大,梯度下降可能不会使得代价函数达到一个最低点,反而会以一个较高的代价结束这一次计算。
如果我们能够计算二阶导,那么我们就可以选择合适的α \alphaα,从而弱化在局部最小值处的振荡。
特征值、凸性和鞍点
- Hessian的特征向量/特征值描述了主曲率的方向和每个方向的曲率量。
- 如果偏导数是连续的,那么微分的顺序可以换(∂ 2 f ∂ x 1 ∂ x 2 = ∂ 2 f ∂ x 2 ∂ x 1 \frac{\partial^{2} f}{\partial x_{1} \partial x_{2}}=\frac{\partial^{2} f}{\partial x_{2} \partial x_{1}}∂x1∂x2∂2f=∂x2∂x1∂2f)(Clairaut’s theorem)。因此Hessian矩阵是对称的。在深度学习的环境中,一般都是这种情况,因为我们强迫使我们的函数是连续且可微的。Hessian就可以被分解成一组实特征值和一组正交特征向量。
- 在机器学习优化中,当我们使用梯度下降法收敛到一个临界点后,我们需要检查海森特征值来确定它是最小、最大还是鞍点。研究特征值的性质可以告诉我们函数的凸性。对于所有x ∈ R n \bm x∈R^nx∈Rn :
- 如果H是正定的,H ≻ 0 H \succ 0H≻0(所有特征值> 0),那么二次型问题在高维空间中呈“碗”形,且严格凸(只有一个全局最小值)。如果f ′ ( x ) = 0 f'(\bm x)=0f′(x)=0,那么x \bm xx是全局最小值点。
- 如果半正定,H ⪰ 0 H\succeq 0H⪰0(所有特征值>=0),则函数是凸的,如果f ′ ( x ) = 0 f'(\bm x)=0f′(x)=0,则x \bm xx是局部最小值点。
- 负正定H ≺ 0 H\prec 0H≺0(所有特征值<0),二次型问题在高维情况下呈倒碗状,并且是严格凹的(只有一个全局最大值)。如果f ′ ( x ) = 0 f'(\bm x)=0f′(x)=0,那么x \bm xx就是全局最大值。
- 半负定⪯0(所有特征值< = 0),那么函数是凹的。如果f ′ ( x ) = 0 f'(\bm x)=0f′(x)=0,则x \bm xx是局部最大值。
- 如果H是不定的,(在x \bm xx处的特征值有正有负),这意味着x \bm xx是局部最小&局部最大,因此x \bm xx是f ff的一个鞍点。
这里n维向量x = ( x 1 , x 2 , . . . . , x n ) \bm x=(x_1,x_2,....,x_n)x=(x1,x2,....,xn),所以f ′ ( x ) = 0 f'(\bm x)=0f′(x)=0表示对所有自变量x i x_ixi的偏导数δ f δ x i = 0 \frac{\delta f}{\delta x_i}=0δxiδf=0。
注意,1~4反推下并不成立。e.g. :严格凸并不意味着正定。
(原文还有个泰勒展开,来证明这个的,不翻译了,看原文即可)