点云中经常会用到的一个概念是体素(Voxel)。
介绍体素之前先介绍一下图像像素。图像一般是按行列的像素存储的,也就是通常说的图像分辨率。对于WxH大小的图片,相当于把图片划分成如下的网格,然后每个网格里的颜色或者灰度值不同。这样就称为了一幅图像

对应到三维空间,点云是由点组成的,通常每个点由x、y、z三个坐标组成。三个坐标对应二维图像中的灰度值。类比与二维图像,三维空间有以下几个区别:
(1)二维图像的网格是均匀分布的,而三维点云分布在三维空间,同时是非均匀分布的。
(2)二维图像相邻像素的位置坐标相差一个1单位像素,而三维点云中相邻点的间距并不是一个固定值。
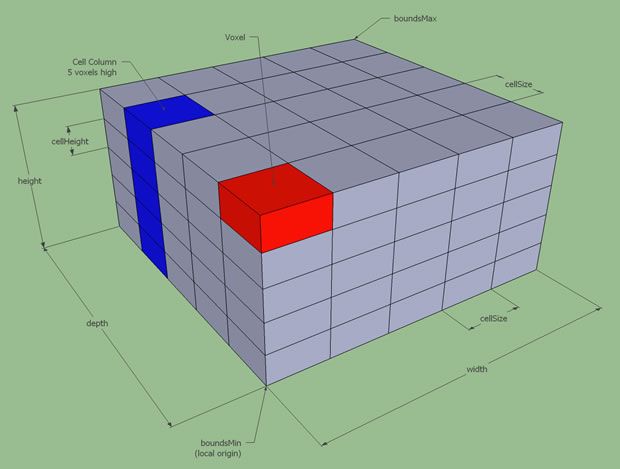
为了让三维点云也具备和二维图像一样的均匀分布,体素将整个三维空间分成一个个立体的方格。体素可以让整个三维空间分割成一个均匀分布的空间。我们可以很容易看到:
(1)如果将体素的立方体长宽高设置成最小的长度单位,这样可以让每个点都落在一个体素当中。但是这样做会导致很多体素里面并不存在一个点,并且数据量会非常大。另一方面,点云的分布没有改变,仍然是不均匀的。
(2)用一个相对大的立方体作为体素单位,尽可能使所有的体素中都有点落在里面。这样会出现一个体素里面有多个点。如果每个体素都用一个点来代表这个体素中点云的特征,那么整个点云会被下采样成均匀分布的形式。显然,体素是一个常用的点云下采样方法。
下图是体素示意图,来源于什么是体素(Voxel)? - 知乎。
python三维点云研究计划_Coding的叶子的博客-CSDN博客_3d点云 python将按照以下目录持续进行更新……点云格式介绍、点云可视化、点云投影、生成鸟瞰图、生成前视图、点云配准、点云分割、三维目标检测、点云重建、深度学习点云算法……https://blog.csdn.net/suiyingy/article/details/124017716更多三维、二维感知算法和金融量化分析算法请关注“乐乐感知学堂”微信公众号,并将持续进行更新。