在这里的旋转矩阵指的是坐标变换的旋转矩阵。
若矩阵![]() 与四元数
与四元数![]() 均表示由坐标系G变换至用坐标系L进行表达。
均表示由坐标系G变换至用坐标系L进行表达。
则![]()
![]()
因为某点P绕某轴![]() 旋转
旋转![]() 角后在坐标系中的坐标值,等于,保持点在空间中不动,将坐标系绕此轴旋转
角后在坐标系中的坐标值,等于,保持点在空间中不动,将坐标系绕此轴旋转![]() 角度后,点在新坐标系中的坐标值。
角度后,点在新坐标系中的坐标值。
而用四元数进行旋转操作时,是顺时针旋转为正方向。
假设坐标系G绕轴![]() 逆时针旋转
逆时针旋转![]() 角与坐标系L重合,则对应的四元数为
角与坐标系L重合,则对应的四元数为
![]()
一、由四元数转换为坐标变换旋转矩阵的关系如下所示。经推导可得相互转换关系如下:(右乘)
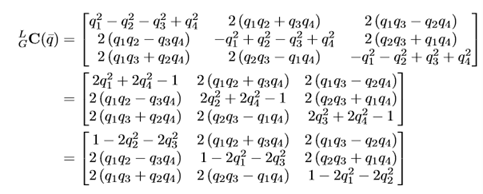
下面进行证明:
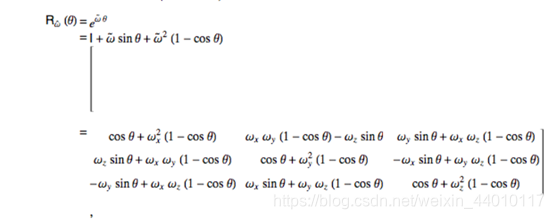
本旋转矩阵可以用Rodrigues' 旋转矩阵进行推导求证
罗德罗杰斯旋转矩阵如下。旋转轴方向单位矢量![]() ,旋转角度为
,旋转角度为![]() 。
。
若采取左乘方式进行旋转,即![]() ,其中,
,其中,![]() 与
与![]() 均为行向量。
均为行向量。
则旋转效果是原点或图像绕旋转轴顺时针旋转![]() 角度。(左手螺旋法则)
角度。(左手螺旋法则)
若采取右乘方式进行旋转,即![]() ,其中,
,其中,![]() 与
与![]() 均为行向量。
均为行向量。
则旋转效果是原点或图像绕旋转轴逆时针旋转![]() 角度。(右手螺旋法则)
角度。(右手螺旋法则)
因为![]() ,所以若逆时针旋转
,所以若逆时针旋转![]() 角度,等于顺时针旋转
角度,等于顺时针旋转![]() 角度,而
角度,而![]() ,就等于把右乘变为左乘。
,就等于把右乘变为左乘。
易证,![]() ,并且
,并且![]() 采取的右乘,所以效果等同于绕旋转轴逆时针旋转
采取的右乘,所以效果等同于绕旋转轴逆时针旋转![]() ,而由坐标系关系博客可得几何变换与坐标系变换矩阵互逆,而我们可以证明
,而由坐标系关系博客可得几何变换与坐标系变换矩阵互逆,而我们可以证明
![]()
绕某轴旋转一定角度的矩阵与绕轴反向旋转的矩阵是互逆的,所以可以证明![]() 与q的关系的正确性。
与q的关系的正确性。
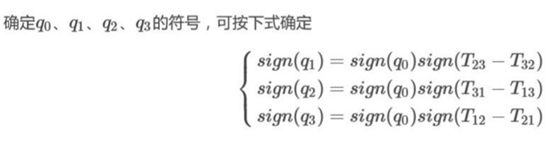
二、由坐标变换旋转矩阵转换为四元数的方法如下所示:
设旋转矩阵T=
则的如下方程:

可得:

因为若绕轴旋转![]() :
:
![]()
![]()
![]()
四元数的正负并不影响其的旋转效果。
相关链接:三维旋转:旋转矩阵,欧拉角,四元数 - 一叶斋主人 - 博客园
版权声明:本文为weixin_44010117原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。