- 配置系统软件源
打开“软件和更新”,进入到“Ubuntu软件“页面,允许universe、restricted、multiverse三项,即勾选这三项,如下图所示。安装完ubuntu系统后这三项是默认允许的,但还是检查一下比较好。
- 添加密钥
打开终端,输入以下指令添加密钥:
sudo apt install curl gnupg2 -y
curl -s https://gitee.com/ohhuo/rosdistro/raw/master/ros.asc | sudo apt-key add -
- 设置软件源
输入以下指令将存储库添加到源列表中:
sudo sh -c 'echo "deb [arch=$(dpkg --print-architecture)] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" > /etc/apt/sources.list.d/ros2-latest.list'
- 安装ROS2
使用如下命令确保软件索引是最新的:
sudo apt update
使用如下命令安装foxy桌面版:
sudo apt install ros-foxy-desktop
安装过程中很可能因为网络原因而安装失败,要多尝试几次,或者连接手机热点继续安装。安装过程如下所示:
- 安装自动补全工具
输入以下指令进行安装,其中-y表示当执行该命令后,出现需要选择确认或取消的时候(即选择y/n的时候),自动选择y
sudo apt install python3-argcomplete -y
- 设置环境变量
在使用之前还要对环境变量进行配置,在终端输入如下指令:
echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrc
source .bashrc
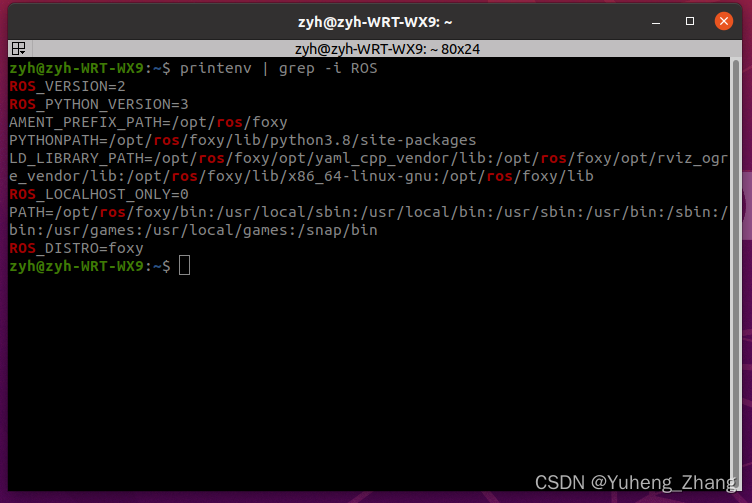
到此,安装过程已经完成啦,可以在终端输入以下指令查看环境变量,包括ROS_VERSION和ROS_DISTRO等
printenv | grep -i ROS
- 官方demo测试
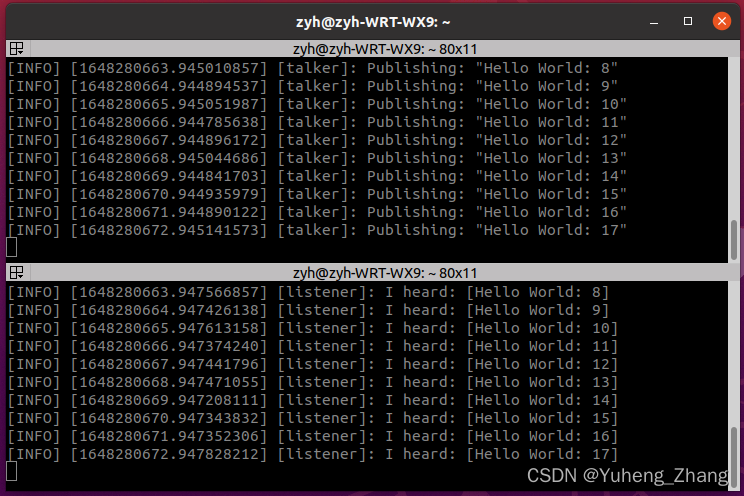
新打开两个终端,分别输入以下两行指令,第一行指令用于发布话题消息,第二行订阅消息
ros2 run demo_nodes_cpp talker
ros2 run demo_nodes_cpp listener
上面两行指令的程序是C++写的,也可以测试Python写的:
ros2 run demo_nodes_py talker
ros2 run demo_nodes_py listener
- 小海龟测试
打开一个终端,输入命令:ros2 run turtlesim turtlesim_node,可以看到小乌龟的仿真界面已经打开了。再打开一个新终端输入指令:ros2 run turtlesim turtle_teleop_key,可以通过键盘的方向键控制小乌龟在界面中移动,如下图所示:
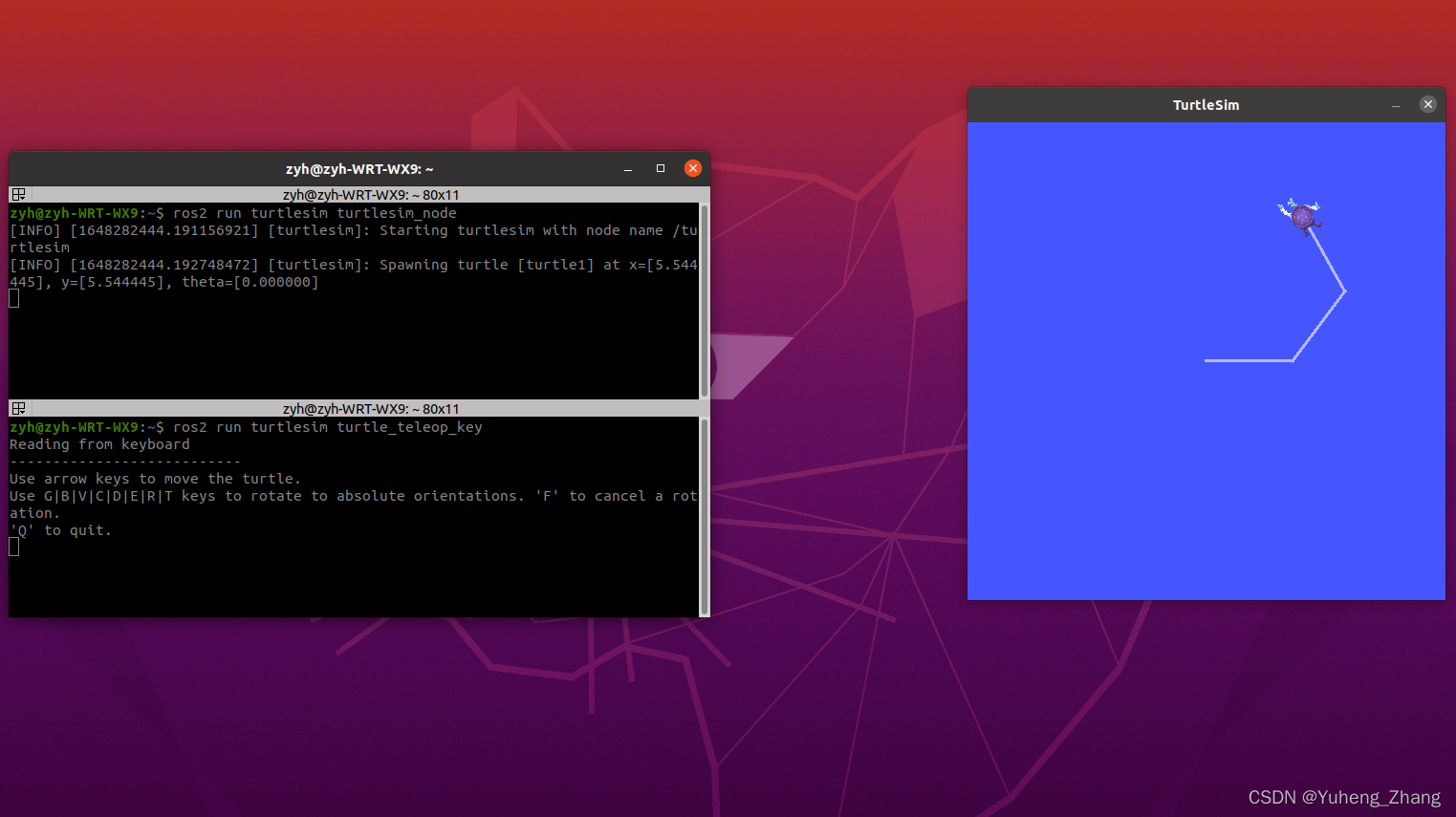
从以上两个测试中可以发现,一开始没有运行roscore指令,即ROS2取消了master主节点。去中心化后,各个节点之间可以通过DDS的节点相互发现。
文章不妥之处还望指正
版权声明:本文为weixin_45168199原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。