- 模糊控制实质上是一种非线性控制
- 模糊控制器包括四部分:
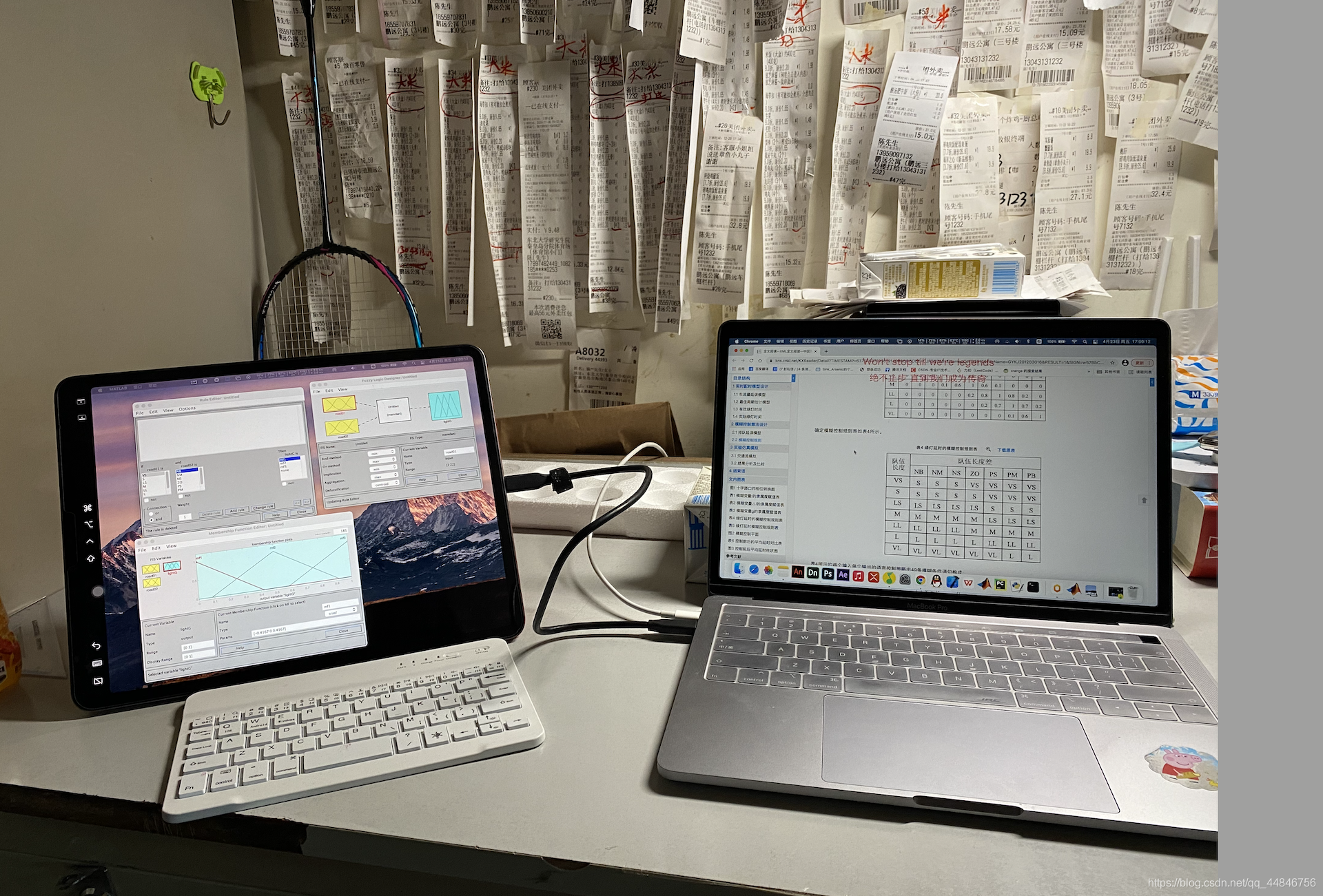
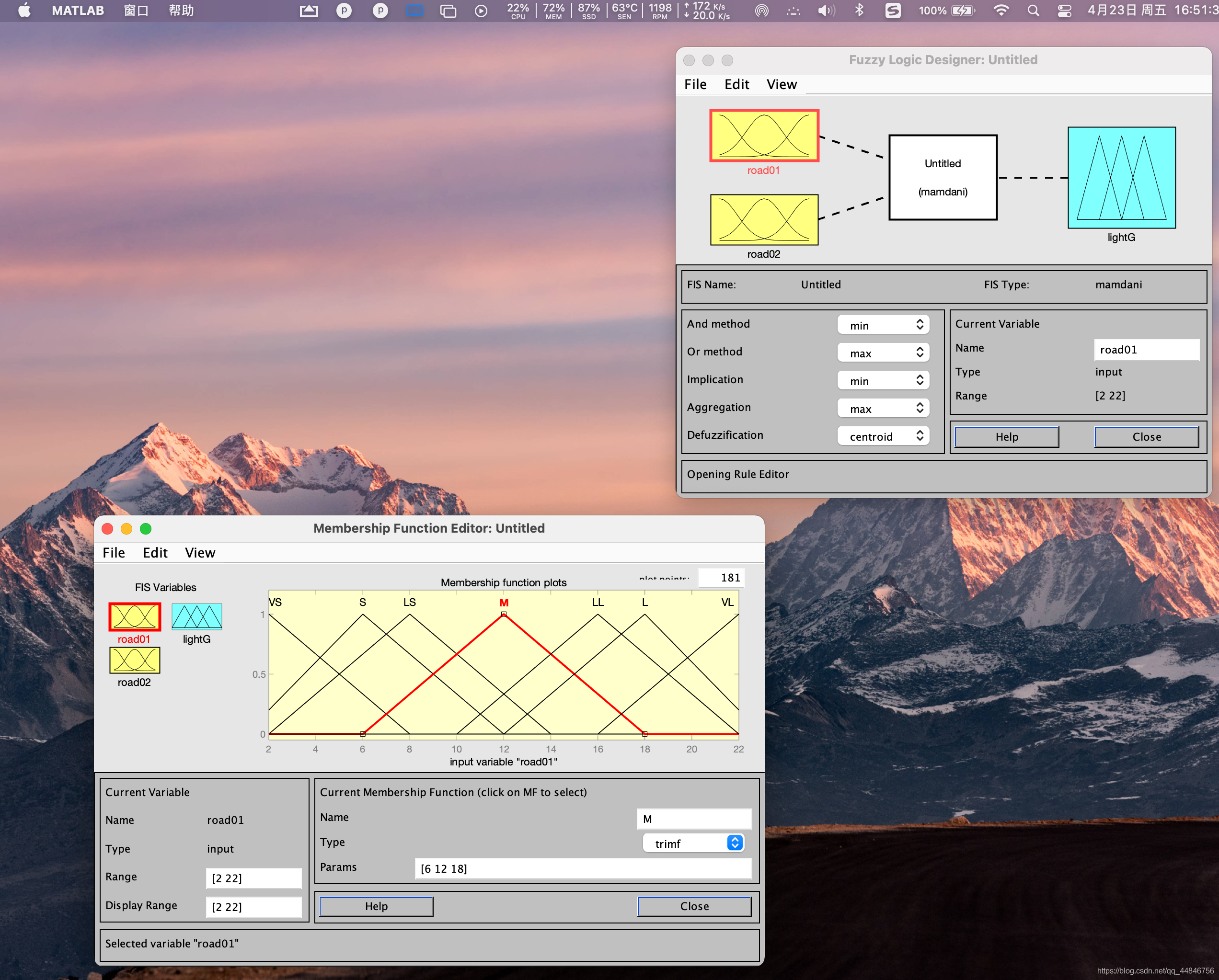
(1)模糊化。主要作用是选定模糊控制器的输入量,并将其转换为系统可识别的模糊量,具体包含以下三步:
第一,对输入量进行满足模糊控制需求的处理;
第二,对输入量进行尺度变换;
第三,确定各输入量的模糊语言取值和相应的隶属度函数。
(2)规则库。根据人类专家的经验建立模糊规则库。模糊规则库包含众多控制规则,是从实际控制经验过渡到模糊控制器的关键步骤。
(3)模糊推理。主要实现基于知识的推理决策。
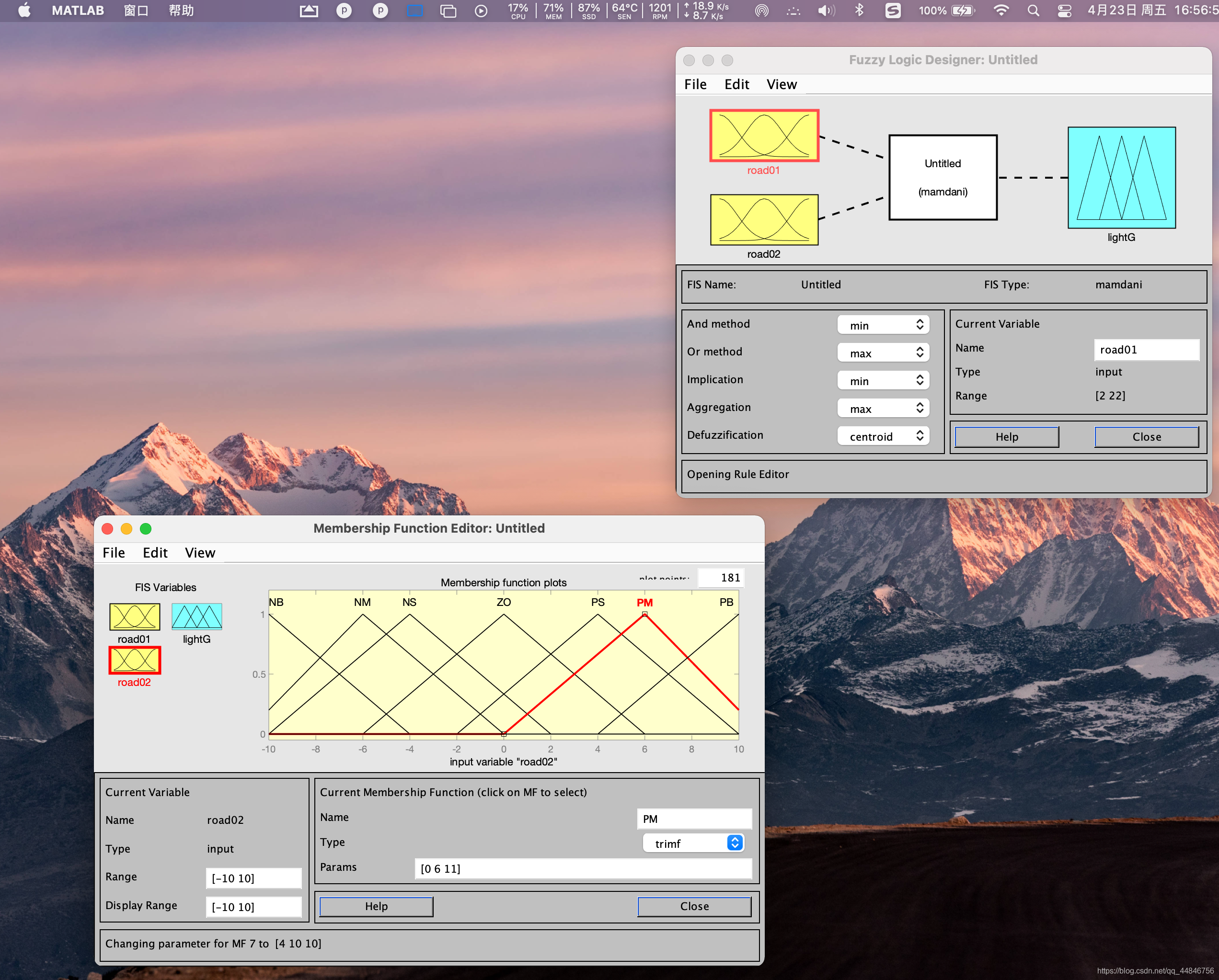
(4)解模糊。主要作用是将推理得到的控制量转化为控制输出。
- 专家的知识通常可用if….then的型式来表述。



版权声明:本文为qq_44846756原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。