ORB-SLAM2
ORB2是对ORB的扩展,如果你完美的运行了ORB,那么会很容易make出ORB2,如果你直接从ORB2开始,中途遇到问题可以从上面的博客中找到解决方法,都是共通的。
同样按照github指示操作,地址:https://github.com/raulmur/ORB_SLAM2
默认大家已经运行了ORB,忽略之前的环境安装环节。
1、克隆文件
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
2、打开终端运行
cd ORB_SLAM2
chmod +x build.sh
./build.sh
跑通EuRoC数据集
这部分在github上也有详细描述,包括单目相机(Monocular)、双目相机(Stereo)、RGB-D(RGB-D)相机,包括TUM数据集、KITTI数据集和EuRoC数据集,本人运行的是单目的EuRoC数据集,具体操作如下:
1、下载数据集,地址:http://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets,下不下来的可以用迅雷试试,很大,这里我用的是MH05的包。
2、将下载好的数据集放在home文件夹下,打开终端,运行下面命令
cd ORB_SLAM2-master
./Examples/Stereo/stereo_euroc Vocabulary/ORBvoc.txt Examples/Stereo/EuRoC.yaml /home/kk/mav0/cam0/data /home/kk/mav0/cam1/data Examples/Stereo/EuRoC_TimeStamps/MH01.txt
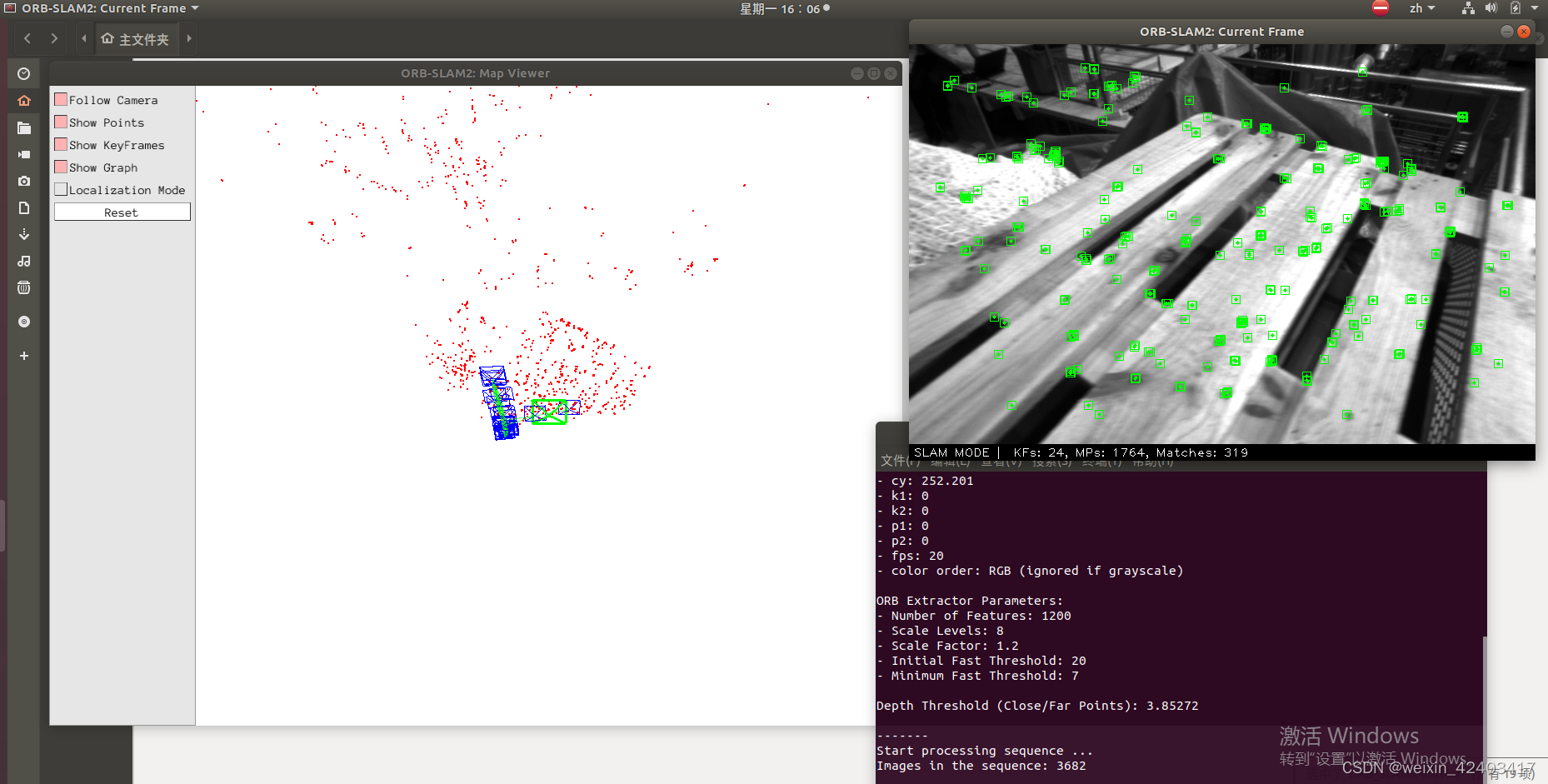
如图可以正常运行。
如果运行过程中遇到错误,可以下载本人提供的镜像!
地址:百度网盘 请输入提取码