深度图(depth) / 视差图(disparity)
- 深度图:场景中每个点到相机的距离
- 视差图:同一个场景在两个相机下成像的像素的位置偏差dis
- 两者关系:depth = b*f / dis (深度 = 基线 x 焦距 / 视差)
- 是三维信息的一种表示方式
如下图,空间中一点p,在两个相机下投影为点为 p1、p2,视差值为它们像素坐标c1、c2的差值。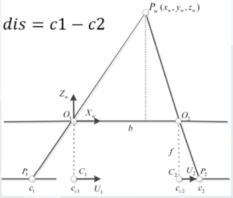
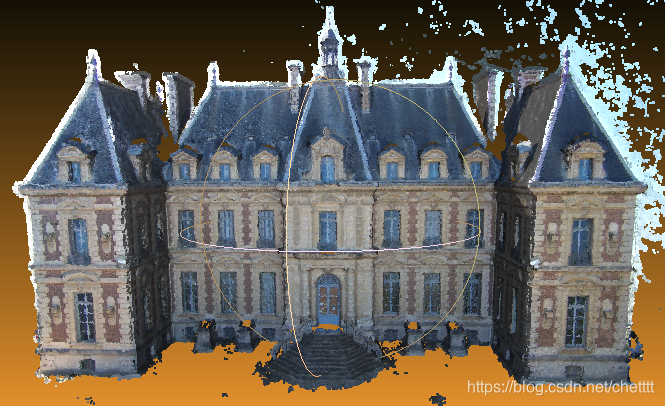
三维点云(point cloud)
- 三维点云是某个坐标系下的点的数据集
- 包含了丰富的信息,包括三维坐标XYZ、颜色RGB等信息
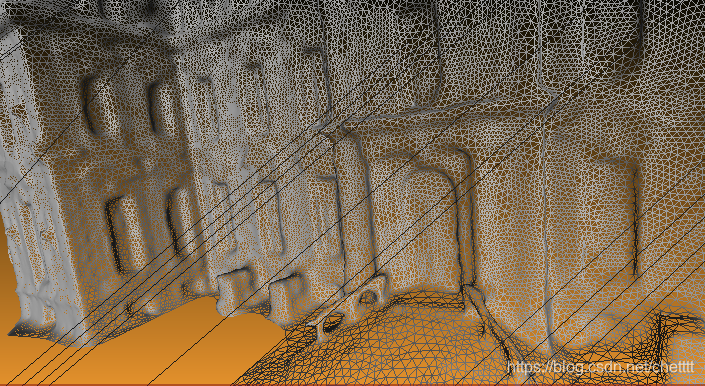
三维网格(mesh)
- 由物体的邻接点云构成的多边形组成的
- 通常由三角形、四边形或者其它的简单凸多边形组成
纹理贴图模型(texture mesh)
- 带有颜色信息的三维网格模型
- 所有颜色信息存储在一张纹理图上,显示时根据每个网格的纹理坐标和对应的纹理图进行渲染得到高分辨率的彩色模型

版权声明:本文为chetttt原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。