描述
STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核,其中STM32F系列有:STM32F103“增强型”系列STM32F101“基本型”系列STM32F105、STM32F107“互联型”系列,增强型系列时钟频率达到72MHz,是同类产品中性能最高的产品;基本型时钟频率为36MHz,以16位产品的价格得到比16位产品大幅提升的性能,是32位产品用户的最佳选择。两个系列都内置32K到128K的闪存,不同的是SRAM的最大容量和外设接口的组合。时钟频率72MHz时,从闪存执行代码,STM32功耗36mA,相当于0.5mA/MHz。
基于stm32实现DMX512协议发送与接收
DMX512数据协议是美国舞台灯光协会(USITT)于1990年发布的一种灯光控制器与灯具设备进行数据传输的标准。它包括电气特性,数据协议,数据格式等方面的内容。
512协议规定使用的波特率是250Kbps,但是stm32可以支持shangMbps的波特率,所以说这不是什么大问题。
该协议发送的数据帧一共11位,1位开始位,8位数据,2个停止位,无校验位。
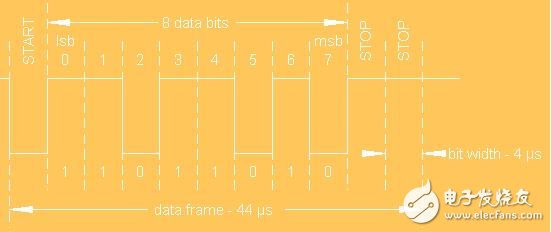
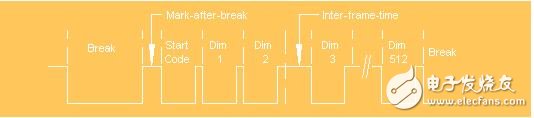
根据波特率可以知道,位时间是4us,11位数据供需要44us的时间。当然对于标准的512协议是需要break和mark after break 帧的,break是一个92us的低电平,而mark after break是一个12us的高电平,如下图所示
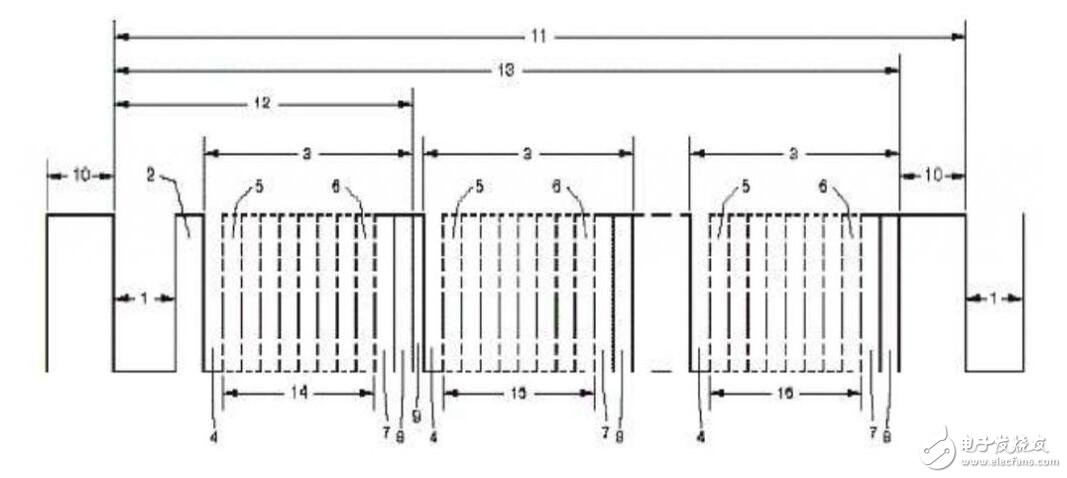
根据上面的图片(缺失了起始码,下图补上),512协议必须有break和mark,但是在我们通常的非标准收发中,检测break和mark相对比较困难,如果非要做,耗费的资源也比较多,比如定时器计时,中断等等。如果不是做标准控制器的,完全可以另辟蹊径。
根据512 协议,每一串数据的开始都要有一个起始码,也称复位码,其数据为0,但是从开始位数至第十位是0,用来声明数据传输开始,随后包含1-512个数据,也称调光数据,其是标准的数据帧,所以第十位是1,所以我们可以根据这个第十位来进行做文章。大家都知道,一般的单片机,像51,avr等都是支持8-9位数据发送的,所以我们就是用9位数据,1位停止位,无校验位,通过检测检测第十位,也就是所谓的RB8来进行数据的接收与传输,不需要发送break和mark。
1、发送端
串口设为 9位数据,1停止位,无校验位,波特率250000
void USART1_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 250000;
USART_InitStructure.USART_WordLength = USART_WordLength_9b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USART1 */
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 Receive and Transmit interrupts */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
//USART_ITConfig(USART1, USART_IT_TC, ENABLE);
/* Enable the USART1 */
USART_Cmd(USART1, ENABLE);
}
注意在初始化串口的时候别忘了485芯片设为发送状态
接下来主要就是数据包的发送,发送的时候注意起始码的数据第九位设为0,调光数据第九位设为1.
void DMX_SendPacket(void)
{
pDMX_buf = 0;
while (pDMX_buf 《= 512) //1-512
{
/* send data packet to slaves*/
if(USART1-》SR & (1《《6))
{
/*发送起始码 00*/
if (0 == pDMX_buf)
{
USART1-》DR = ((USART1-》DR) & 0xfe00); //第九位置0
}
else
{
USART1-》DR = 0x0100 | DMX_buf[pDMX_buf]; //第九位置1
}
pDMX_buf++;
}
}
}
以上函数相比大家都可以看懂,接下来就是在main函数中进行循环数据的发送了,比如每200ms发送一次,由于发送快,偶尔的错误也不是很明显。
2,、接收端
接收端得工作就是接收的信息进行解码(废话),关键是对RB8的处理,接收用到了中断接收,所以需要使能接收中断。
void USART1_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 250000;
USART_InitStructure.USART_WordLength = USART_WordLength_9b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
/* Configure USART1 */
USART_Init(USART1, &USART_InitStructure);
/* Enable USART1 Receive and Transmit interrupts */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//使能接收中断
//USART_ITConfig(USART1, USART_IT_TC, ENABLE);
/* Enable the USART1 */
USART_Cmd(USART1, ENABLE);
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
#ifdef VECT_TAB_RAM
/* Set the Vector Table base location at 0x20000000 */
NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */
/* Set the Vector Table base location at 0x08000000 */
NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
#endif
//设置优先级分组:先占优先级和从优先级 ,先占优先级0位,从优先级4位
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
/* Enable the USART1 Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void USART1_IRQHandler(void)
{
uint16_t UDR;
static uint16_t RXB8;
static uint16_t pDMX_buf = 0; //数据指针
static uint8_t fDMX_buf_right = 0;
//接收数据
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//USART_FLAG_RXNE
{
//USART_ClearITPendingBit(USART1,USART_FLAG_RXNE);
UDR = USART_ReceiveData(USART1);
RXB8 = (UDR & 0x0100);
if (RXB8 == 0) //复位信号
{
if (!UDR)
{
fDMX_buf_right = 1;//接收数据正确
pDMX_buf = 1; //直接接收第一个数据 不保存第0个数据。
}
}
else //rb8 =1 pDMX_buf=1 调光数据
{
if (1 == fDMX_buf_right)
{
DMX_buf[pDMX_buf++] = (u8)UDR;
//接收到512个数据
if (pDMX_buf 》 512)
{
fDMX_buf_right = 0;
tim_update = SET; //更新调光数据
}
}
}
}
}
打开APP阅读更多精彩内容
点击阅读全文