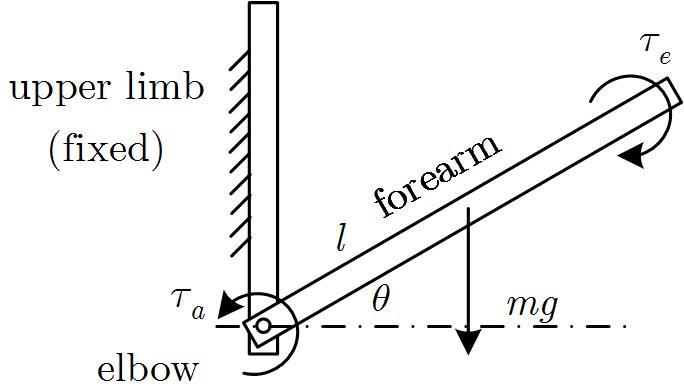
PD控制和阻抗控制看起来的确很像,但是目标不同。PD控制是用于轨迹跟踪(tracking),而阻抗控制是对外力矩呈现柔性(compliance)。
具体可参考如下链接:
![]()
![]()
![]()

![]()
![]()
当机器人在自由空间中运动时,阻抗控制退化为PD位置控制。所以,机器人能自然地在自由空间和约束空间之间切换。
版权声明:本文为weixin_51367832原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。
PD控制和阻抗控制看起来的确很像,但是目标不同。PD控制是用于轨迹跟踪(tracking),而阻抗控制是对外力矩呈现柔性(compliance)。
具体可参考如下链接:
![]()
![]()
![]()
![]()
![]()
当机器人在自由空间中运动时,阻抗控制退化为PD位置控制。所以,机器人能自然地在自由空间和约束空间之间切换。