文章目录
1. 测试环境介绍
激光雷达型号:VLP-16-A
操作系统:ubuntu16.04
ROS版本:kinetic
2. 连接激光雷达
2.1 启动雷达
给激光雷达上电,并通过网线把雷达与电脑连接起来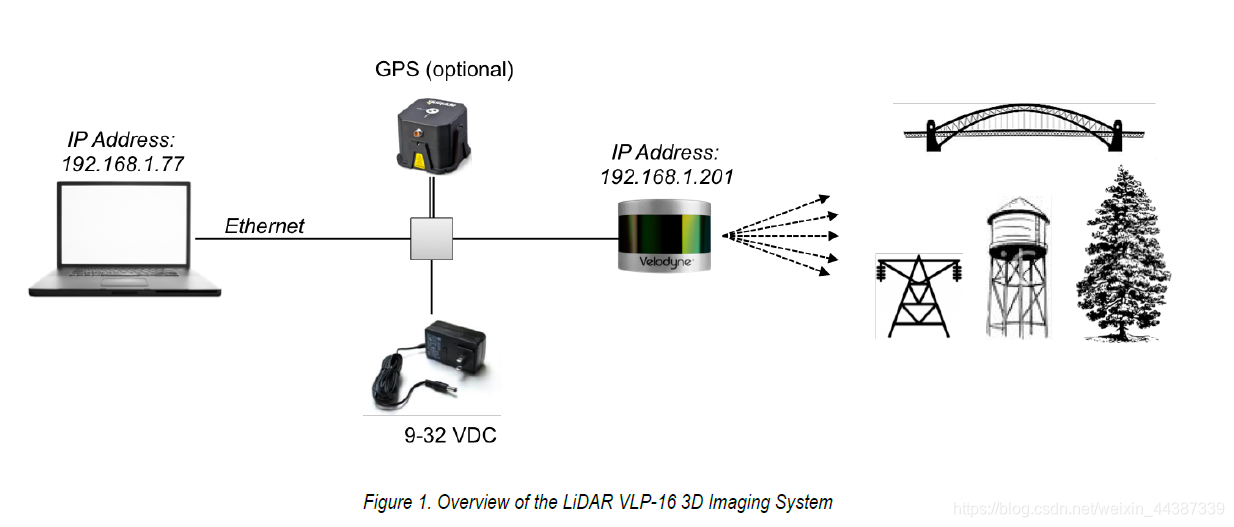
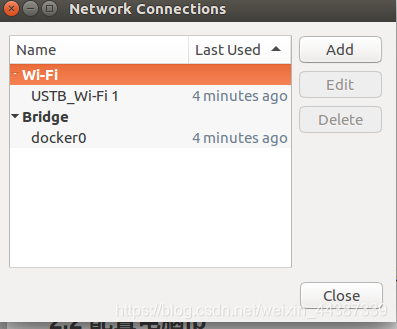
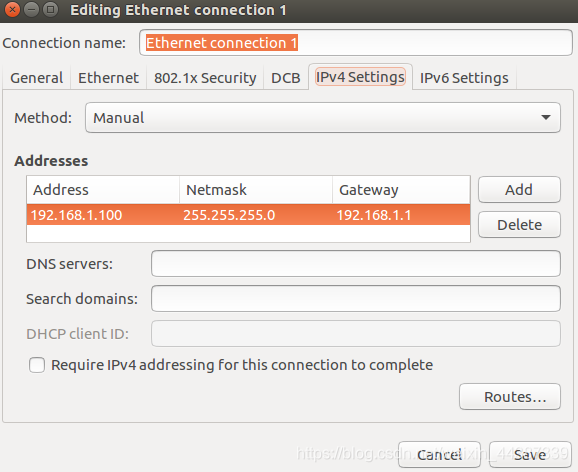
2.2 配置电脑ip
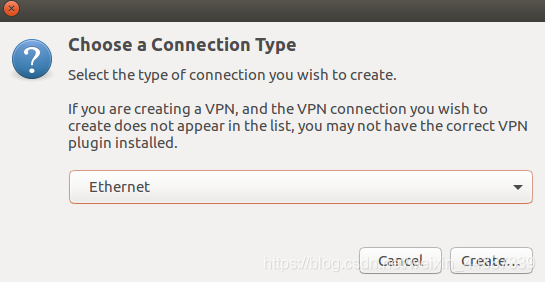
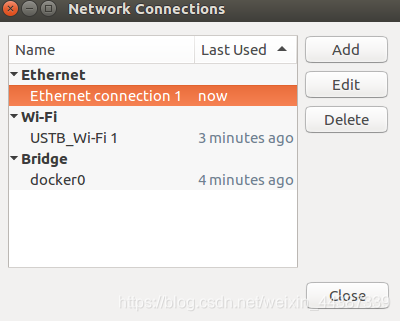
- 编辑以太网有线连接,如果没有则创建(点击add–>选择Ethernet–>create)
- 编辑ipv4,方式设置为手动,ip地址、掩码以及网关设置成下图(ip地址的100可以设置成其他的,只要不与激光雷达的201相同即可)
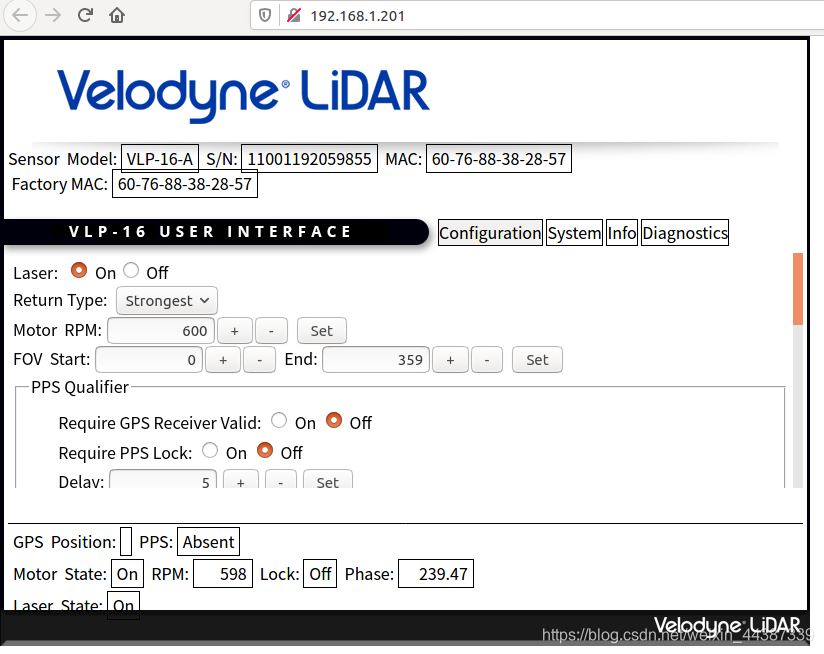
- 访问192.168.1.201,查看激光雷达配置页面,如果查看到下图信息表示雷达连接成功
3. 安装ROS依赖以及驱动
3.1 安装ROS依赖
sudo apt install ros-kinetic-velodyne
有的博主提到还需要安装下方的依赖,我试了试不装也可以正常运行,还是放到这里吧
sudo apt-get install libpcap-dev
3.2 安装驱动
mkdir -p ~/catkin_velodyne/src && cd ~/catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ~/catkin_velodyne/ && catkin_make
source ~/catkin_velodyne/devel/setup.bash
4. 运行驱动程序查看激光点云
4.1 运行ROS程序
roslaunch velodyne_pointcloud VLP16_points.launch
4.2 rostopic 终端打印点云数据
rostopic echo /velodyne_points
4.3 rviz查看激光点云
rosrun rviz rviz -f velodyne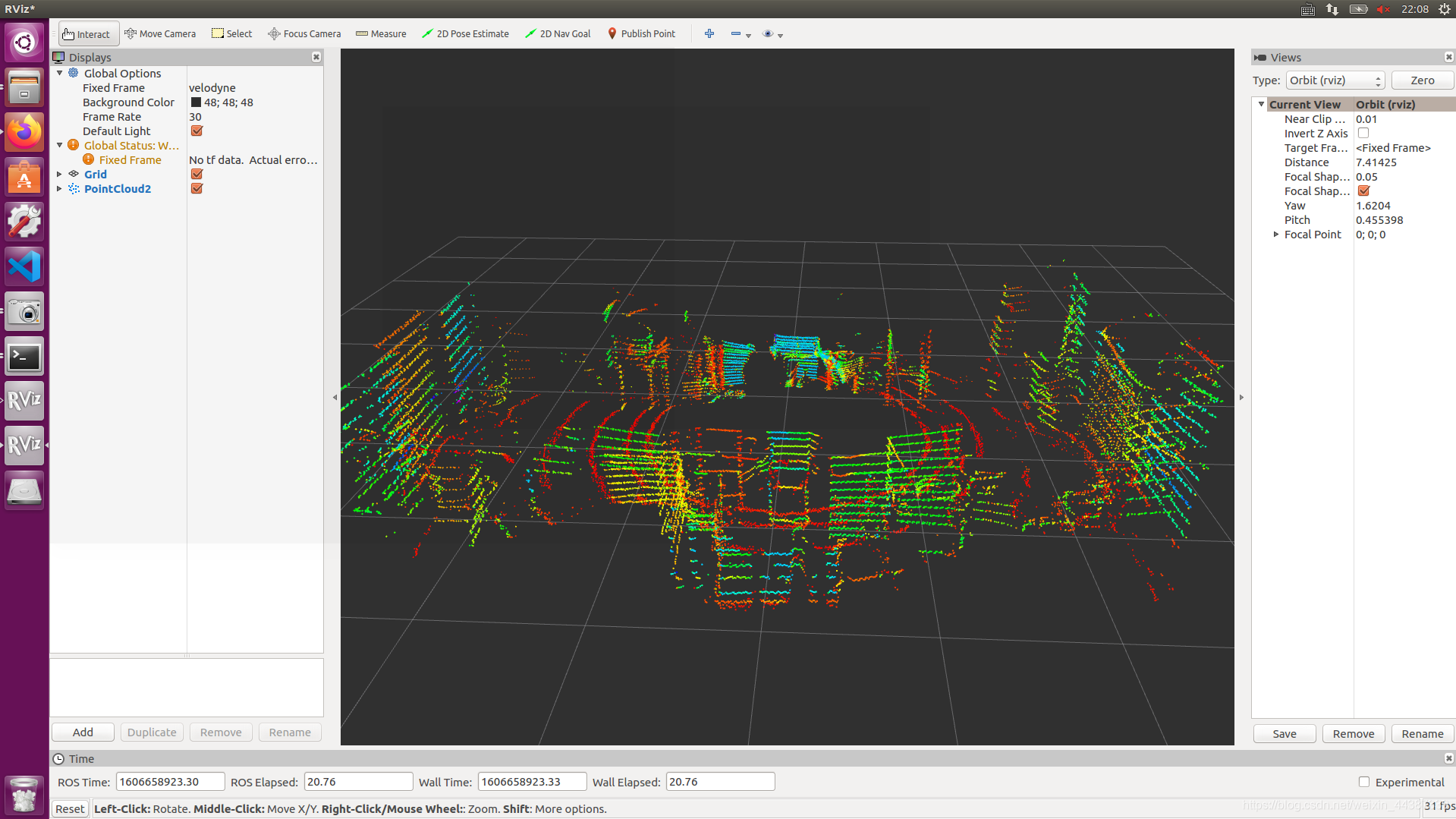
5. 常见问题以及解决
首先需要注意的是launch之前一定要source setup.bash
5.1 roslaunch velodyne_pointcloud VLP16_points.launch报错
[ WARN] [1606659546.548501176]: Velodyne poll() timeout
[ERROR] [1606659546.548607516]: DriverNodelet::devicePoll - Failed to poll device.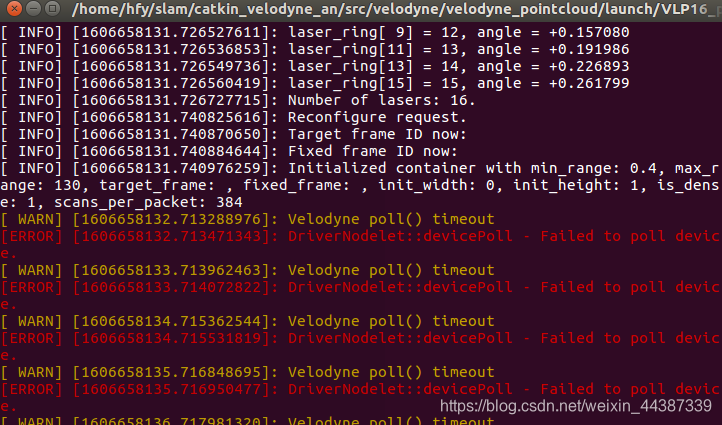
报这个错误是因为ROS读取不到激光雷达的数据,一般是因为VLP16_points.launch文件中设置的端口与激光雷达的数据端口不一致。
解决方式
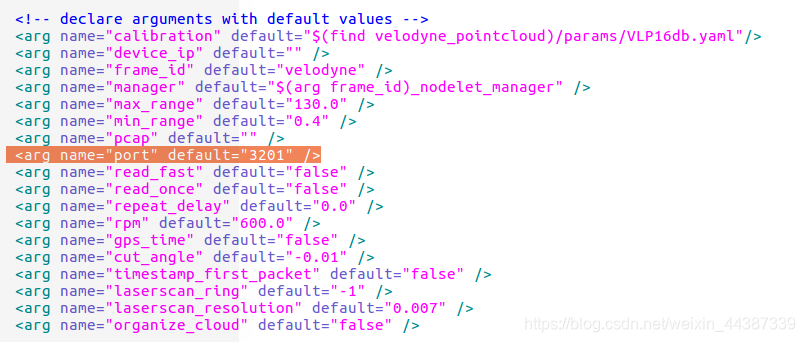
- 到192.168.1.201查看数据端口,如下图查看到端口号为3201

- 修改 ~/catkin_velodyne/src/velodyne/velodyne_pointcloud/launch/VLP16_points.launch 文件,使端口号与激光雷达的实际数据端口保持一致
- 重新运行 roslaunch velodyne_pointcloud VLP16_points.launch即可
5.2 rviz窗口不显示点云数据
点击add 添加/velodyne_points话题即可正常显示
参考链接:
[1] Getting Started with the Velodyne VLP16
[2] Velodyne VLP16激光雷达的使用(非常详细)
[3] VLP-16第一课: Velodyne的工作原理和驱动安装
版权声明:本文为weixin_44387339原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。