一、下载并安装qt-ros的插件
根据ubuntu的不同版本进行下载:

下载后将插件改为可执行文件,然后双击进行傻瓜安装即可。

二、创建并使用gui-ros功能包
1.打开终端 工作空间
代码如下(示例):
mkdir -p ~/ui_ws/src
2.安装配置ros-melodic-qt-ros
ROS自带功能包可以直接创建带有Qt界面的package,方法为通过catkin_create_qt_pkg命令创建,然后导入Qt中进一步修改为适合自己的GUI节点。
首先安装ros-melodic-qt-ros:
sudo apt-get install ros-melodic-qt-ros

创建功能包:
catkin_create_qt_pkg gui_node
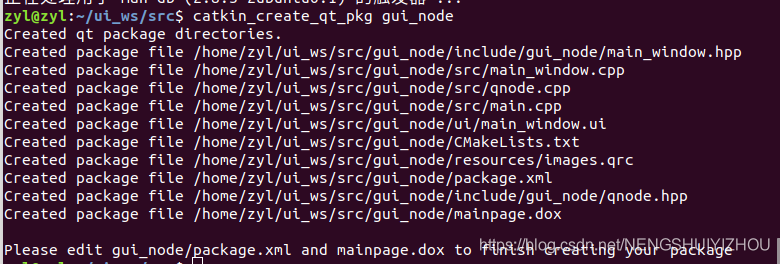
回到工作空间下使用catkin_make进行编译:

3.将功能包导入qt中
打开QT,新建rosworkspace
下一步后,名字选择和上述所建功能包一样的名字,路径为上述创建功能包所在的工作空间。如下图所示

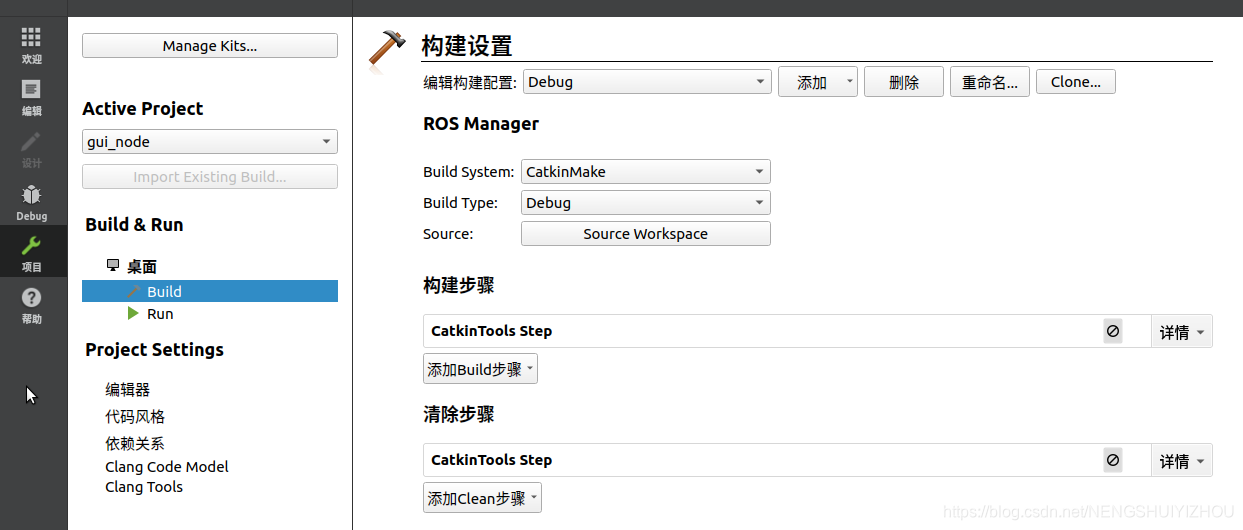
直接下一步即可。导入后,要进行编译和运行,首先需要进行两步设置。
1、点击左侧“项目”,将编译选项即Build中的 build system 改为 CatkinMake 。然后点击左下角的小锤子进行编译即可
2、点击左侧“项目”,修改运行选项即Run中的executable 改为工作空间下devel/lib/ros功能包/节点文件,如下图所示。然后点击左下角的绿色三角形进行运行即可。

最终的运行结果,即初始的gui界面如图所示:可以根据自己的需求进行修改

总结
创建ros-gui的方法有很多种,这只是其中一种哈,可以探索其他更便捷的方法。
版权声明:本文为NENGSHUIYIZHOU原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。