一般而言,轨迹规划包含路径规划和速度规划。为了说明路径规划和速度规划都不是凸问题,先来看看什么叫做凸问题。
两个可行解![]() ,对于
,对于![]() 也是可行解,而且不应比
也是可行解,而且不应比![]() 都差。那么,这就是一个凸问题。
都差。那么,这就是一个凸问题。
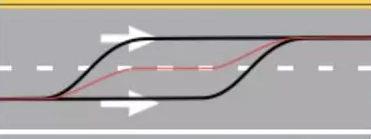
先看路径规划,两条黑线代表不同的变道的可行解,中线红线是二者的线性组合,这条红线明显不是可行解,因为变道太慢,虚线行驶距离过长,如果中间有一障碍物,就更不可行了。
(图片来自参考资料)
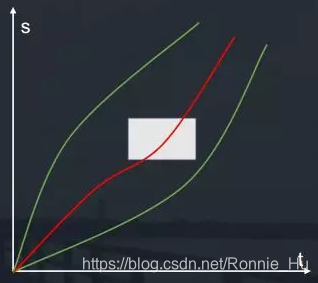
再看速度规划,当一个行人穿马路时,如图中白色矩形所示,对于这种场景,要么加速通过,如图中上方白线,要么减速避让行人,如图中下方白线,很明显,这也不是一个凸问题。
(图片来自参考资料)
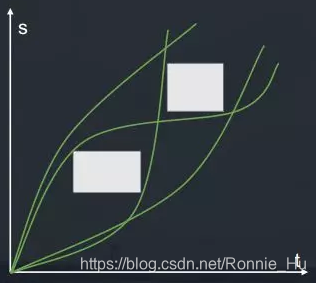
这时候,决策模块就起作用了,它将一个非凸问题简化为凸问题。看下图的例子,两个行人在过马路,如白色矩形所示区域,那么可以做出四种不同的决策:超两个人、超一让一、让一超一、让两个人。一旦决策确定,非凸问题就化简为凸问题了。
(图片来自参考资料)
参考:
自动驾驶轨迹规划,Pony Tech
版权声明:本文为Ronnie_Hu原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。