定位(1):两点对+两旋转角度计算转换矩阵
已知:
坐标系A和坐标系B(全站仪坐标系/大地坐标系(竖直方向向上))对应的两个点的坐标。
点1在A坐标系下的坐标A1(X1,Y1,Z1);
点1在B坐标系下的坐标B1(X01,Y01,Z01);
点2在A坐标系下的坐标A1(X2,Y2,Z2);
点2在B坐标系下的坐标B1(X02,Y02,Z02);
坐标系A的俯仰角度β和横滚角度α
目标:
求解坐标系A到坐标系B的转换矩阵
分析:
对于任意一个点,在坐标系A和坐标系B之间的关系如下: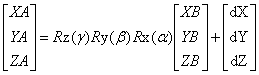
其中绕Z轴的旋转角度和平移矩阵为未知量。
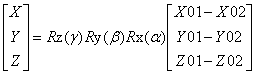
将两个点对的关系方程相减,消除平移矩阵,先求解绕Z轴的旋转。
解算:
1)计算两点在坐标系A下的矢量(X,Y,Z)
X=X1-X2;
Y=Y1-Y2
Z=Z1-Z2;
2)令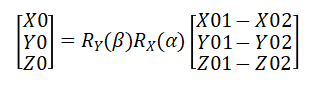
3)计算绕Z轴的旋转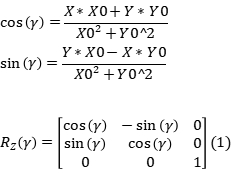
4)求解平移矩阵: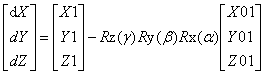
版权声明:本文为qq_17386217原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。