本文旨在记录算法笔记学习过程中的收获和一些知识点,部分易错知识点只针对个人而言,CCF-CSP考试冲鸭!!!
Chapter 2 C/C++快速入门(易错知识点)
2.1 基本数据类型
变量定义注意区分大小写。
一、整型
整型int,32bit(4Byte),取值范围是,绝对值在
范围内的整数都可以定义成int。
长整型long long,64bit(8Byte),取值范围是,绝对值超过
的整数就需要用long long存储。
如果long long型赋大于的初值,则需要在初值后加上LL,否则编译错误。
二、浮点型
单精度浮点float,取值范围,有效精度只有6~7位。
双精度浮点double,取值范围,有效精度有15~16位。
尽量不要使用float,浮点型数据使用double存储。
2.2 顺序结构
一、使用scanf和printf输入/输出
scanf的%c是可以读入空格和换行的,因此在scanf的格式符选择上一定要注意是否能够正确读入需要输入的数据。
scanf对除%c以外,其他格式符的输入以空白符(空格、Tab)为结束判断标志;字符数组使用%s读入时以空格跟换行为读入结束标志。例如:
char str[10];
scanf("%s",str);
printd("%s",str);上述代码段运行时,输入/输出结果如下:
//输入数据:
abcd efg
//输出数据:
abcd即,abcd和efg之间的空格作为了scanf()读入字符数组结束的标志。
常用的输出格式:
(1)%md:使不足m位的int型变量以m位右对齐输出,高位以空格补齐;多于m位的变量原样输出。
(2)%0md:使不足m位的int型变量以m位右对齐输出,高位以0补齐;多于m位的变量原样输出。
(3)%.mf:让浮点数保留m位小数输出,舍入规则:“四舍六入五成双”。
2.5 数组
2.5.4 memset——对数组的每个元素赋相同的值
使用memset( )必须在程序开头添加string.h头文件。使用格式:
memset(数组名,值,sizeof(数组名))注意:memset( )是按字节赋值!
2.7 指针
2.7.5 引用(c++)
引用(&)不产生副本,只是给原变量取了别名。
对引用变量的操作就是对原变量的操作。
使用引用变量简化了指针的使用。
2.8 结构体
2.8.3 结构体的初始化
*引入c++的构造函数进行初始化,可以简化结构体的初始化操作。
一、构造函数
在结构体中定义的,用于初始化结构体的一种函数。
特点:不需要写返回类型,函数名与结构体名相同。
一个结构体可以有多个构造函数,可以对部分结构体内变量进行初始化。
struct studentInfo{
int id;
char gender;
//默认生成的构造函数
studentInfo(){}
//只初始化gender
studentInfo(char _gender){
gender = _gender;
}
//初始化id和gender
studentInfo(int _id,char _gender){
id = _id;
gender = _gender;
}
};注意:1.如果自定义了构造函数,不能不经初始化就定义结构体变量。(此时默认的构造函数已经不存在)
2. 只要参数个数不同,可以定义多个构造函数。
Chapter 3 入门模拟
3.1 简单模拟
PAT B1032 挖掘机技术哪家强
//题目请查看PAT官网https://pintia.cn/problem-sets/994805260223102976/problems/994805289432236032
//利用数组即可实现相应功能
int scores[MAXN] = {0};
int main() {
int i = 0, N = 0;
int school = 0, score = 0;
scanf("%d", &N);
for (i = 0; i < N; i++) {
scanf("%d%d", &school, &score);
scores[school] += score;
}
int flag = 0, max = 0;
for (i = 1; i <= N; i++) {
//这里循环条件必须是1~N,否则测试点2,不能通过测试
if (scores[i] > max) {
flag = i;
max = scores[i];
}
}
printf("%d %d", flag, max);
return 0;
}3.4 日期处理
codeup 1928 日期差值
解决日期差值问题,只需要通过增加小日期,通过比较day和当月日期,month和12的大小关系,实现月、年的增加即可,注意控制条件。
int isleapyear(int year);
int month[13][2] = {
{0,0},{31,31},{28,29},{31,31},{30,30},{31,31},{30,30},
{31,31},{31,31},{30,30},{31,31},{30,30},{31,31}
};
//用于存储平年(第0维)和闰年(第1维)各月的天数
int main() {
int date1 = 0, date2 = 0;
int year = 0, mon = 0;
int day = 0, leap = 0;
while (scanf("%d%d",&date1,&date2) != EOF) {
if (date1 > date2) {
int temp = date1;
date1 = date2;
date2 = temp;
}
int count = 1;
while (date1 != date2) {
count++;
date1++;
year = date1 / 10000;
mon = (date1 % 10000) / 100;
day = date1 % 100;
leap = isleapyear(year);
if (day > month[mon][leap]) {
date1 = year * 10000 + (mon + 1) * 100 + 1;
}//如果day的值超过了本月最大天数,月数增加
year = date1 / 10000;
mon = (date1 % 10000) / 100;
if (mon > 12) {
date1 = (year + 1) * 10000 + 101;
}//如果mon的值大于12,年份增加
}
printf("%d\n", count);
}
}
int isleapyear(int year) {
if ((year % 100 != 0&& year % 4 == 0) || year % 400 == 0) {
return 1;
}
return 0;
}2021.08.12
Chapter 4 算法初步
4.1 排序
4.1.1 选择排序
简单选择排序:进行n趟操作,每趟从待排序的部分[i,n]选择最小的(或最大,由升序或者降序决定)元素,令其与A[i]交换,则[0,i]就变得有序了。
总的时间复杂度为O(n^2)。
4.1.2 插入排序
直接插入排序:对A[1~n],令i=2开始枚举,进行n-1趟操作,每次将第i位插入到有序部分A[1~i-1]。
4.1.3 sort函数应用
参见第6.9.6节。
4.2 散列
4.2.1 散列(hash)定义与整数散列
将元素(key)通过一个函数(H)转换为整数,使得该整数可以尽量唯一地代表这个元素。
除留余数法:
H(key)=key%mod(mod一般直接取表长Tsize)
因为对于不同key的hash值可能相同,所以需要解决冲突:
1. 线性探查法:
依次探查H(key)+i(i=1,2,...)是否被占用。超过表长则回到0开始探查。
2. 平方探查法:
依次探查H(key)+i^2是否被占用,注意不能是负数,对于负数对表长求模。
3. 链地址法:
将H(key)相同的key连接成一个单链表。
4.2.2 字符串hash初步
将字母A~Z,a~z表示为进制数,如字符串中只含有A~Z,则转换为26进制数,再将其用于hash计算。
4.3 递归
4.3.1 分治
分解-解决-合并。
4.3.2 递归
递归边界、递归式
n皇后问题。
4.4 贪心
4.4.1 简单贪心
贪心法:考虑在当前状态下局部最优(或较优)的策略。来使全局的结果达到最优(或较优)
4.5 二分
4.5.3 快速幂
例如求,利用常规循环求解的时间复杂度是O(b)。
快速幂解法:基于二分思想
1. 如果b是奇数,有
2. 如果b是偶数,有
在经过log(b)级别次数转换后,可以把b变成0;任何正整数的0次方是1。
快速幂的递归写法:
typedef long long LL;
//求a^b%m递归写法
LL binaryPow(LL a, LL b, LL m) {
if (b == 0) return 1;
if (b % 2 == 1)return a * binaryPow(a, b - 1, m) % m;
else {
LL mul = binaryPow(a, b / 2, m);
//注意此处必须以另一个变量来接收binaryPow()返回值,否则两次调用binaryPow()并未减少时间复杂度。
return mul * mul % m;
}
}注意:1. 如果初始a可能大于m,则先对m取模
2. 如果m=1,则可以直接判断为0。
快速幂的迭代写法:
将b按二进制展开可以表示为b==
。所以可以将
表示为
,迭代解法:
1. 如果b的第i位(第i次迭代,处理时是最低位)为1,则ans=ans*a%m。
2. a=a*a%m
3. b右移一位,相当于除2。
typedef long long LL;
//求a^b%m递归写法
LL binaryPow(LL a, LL b, LL m) {
LL ans = 1;
while (b>0) {
if (b & 1 == 1) { //该位为1说明需要累积。
ans = ans * a % m;//令ans累积上a
}
a = a * a % m;
b >>= 1;
}
return ans;
}4.6 two pointers
4.6.2 归并排序
2-路归并排序的原理是:
将序列两两分组,将序列归并为个组,组内单独排序;然后将这些组两两合并,生成
个组,组内单独排序;以此类推,直到只剩下一个组为止,归并排序的时间复杂度是O(nlogn)。
4.6.3 快速排序
快速排序的时间复杂度是O(nlogn)。
快速排序的原理:
1. 选定一个主元,将序列中不超过他的数放在他的左侧,比他大的数放在他的右侧;
2. 然后再分别从两侧的子序列中选择主元进行快速排序,直到调整区间不超过1。
当序列接近有序时会达到最坏的情况,时间复杂度为O(n^2),随机选择主元能够将对于任意输入的时间复杂度降低到O(nlogn)。
Chapter 5 数学问题
5.2 最大公约数(gcd)和最小公倍数(lcm)
欧几里得算法:gcd(a,b)=gcd( b , a%b)。
lcm(a,b)=ab/d。(d=gcd(a,b))——a*b中d被乘了两次,除掉一个d则表示所有组成a,b的因子相乘。
5.4 素数
5.4.1 素数的判断
只需判断n能否被2,3,...,整除即可。
5.4.2 素数表的获取
枚举法时间复杂度较高。
筛法能够有效降低时间复杂度O(nloglogn)。
算法从小到大枚举所有数,对每一个素数,筛去它的所有倍数,剩下的数即为素数。从2开始,如果验证到整数i,i还未被筛去,说明i就是一个素数(如果i是合数,必有小于i的质因子,而前期筛去素数的倍数时并没有筛掉i,说明i不是合数)。
利用筛法求解的时候注意:
1. 必须从2开始筛。
2. 素数表必须比n大1。
3. 注意函数中结束控制条件:验证的数9字i必须比设定的最大maxn(数组isPrime[maxn])小,否则访问越界。
5.5 质因子分解
对一个正整数n来说,如果存在[2,n]的质因子,要么这些质因子都小于sqrt(n);要么只存在一个大于sqrt(n)的质因子,其他质因子全小于等于sqrt(n)。
5.8 组合数
5.8.1 关于n!的问题
一、求n!有多少个质因子p
n!中有个质因子p,其中除法为向下取整。
n!中质因子p的个数,实际上等于1~n中p的倍数的个数n/p加上中质因子p的个数。
推导过程:10!中2的个数
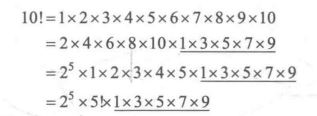
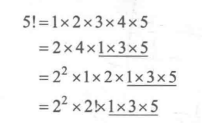
(10/2=5)+(5/2=2)+(2/2=1)=8个
5.8.2 组合数的计算
一、计算的方法
1. 方法一:通过定义式暴力计算,但是由于阶乘一般比较大,所以即使是选择long long数据类型仍然很容易导致溢出。
2. 方法二:通过递推公式计算(最优方法)
递归边界:
long long C(long long n, long long m) {
if (m == n || m == 0)return 1;
return C(n - 1, m) + C(n - 1, m - 1);
}如果涉及到多次计算,为避免重复计算,可以用二维数组存储其值,也可以先将整张表都计算出来:
long long res[67][67] = { 0 };
//用一个数组记录已计算的C
long long C(long long n, long long m) {
if (m == n || m == 0)return 1;
if (res[n][m] != 0)return res[n][m];
return res[n][m]=C(n - 1, m) + C(n - 1, m - 1);
}
//先将整张表计算出
const int n = 60;
void calC() {
for (int i = 0; i <= n; i++) {
res[i][0] = res[i][i] = 1;
}
for (int i = 2; i <= n; i++) {
for (int j = 0; j <= i / 2; j++) {
res[i][j] = res[i - 1][j] + res[i - 1][j - 1];
res[i][i - j] = res[i][j];
}
}
}3.方法三:通过定义式变形计算
因为运算过程涉及到乘除,所以一边乘一边除可以降低溢出的可能性。
二、计算的方法
1. 方法一:通过递推式计算
在5.8.2节C函数中修改即可,在返回时,返回。
2. 方法二:根据定义式计算
,可以通过快速幂来计算每一组
。
遍历不超过n的所有素数,计算n!,m!,(n-m)!中分别含
的个数x,y,z,可以知道
中含有
的个数x-y-z。
//使用筛法得到素数表prime,表中最大素数不小于n
int prime[maxn];
//计算C(n,m)%p
int C(int n, int m, int p) {
int ans = 1;
//遍历不超过n的左右质数
for (int i = 0; prime[i] <= n; i++) {
//计算C(n,m)中prime[i]的指数c,cal(n,k)为n!中含质因子k的个数
int c = cal(n, prime[i]) - cal(m, prime[i]) - cal(n - m, prime[i]);
//快速幂计算prime[i]^c%p
ans = ans * binaryPow(prime[i], c, p) % p;
}
return ans;
}Chapter 6 C++标准模板库(STL)
在STL提供容器中,绝大多数需要提供it,it2(it及it2为数组下标或者容器迭代器),实现的功能都是针对于[it, it2)之间的,即左闭右开!在使用时尤其注意右边界是否是需要作用it2指定的元素。如sort()、reverse();
6.1 vector
#include<vector>
using namespace std;
vector<typename> name;typename可以是其他基本类型或STL容器,注意若typename也是STL容器需要在>>符号间加空格,如vector<vector<int> >name;可以将vector容器当做变长数组使用。
//一维已经固定的变长数组
vector<typename> Arrayname[arraySize]
//二维均可变长数组
vector<vector<int> > name;
访问方式:
(1)下标访问,同数组类似。
(2)迭代器访问:迭代器类似于指针。
vector<typename>::iterator it;注意:在STL容器中,只有vector和string允许使用vi.begin()+k的形式。迭代器结束标志只能以it!=xxx结束,不支持大小比较。
vector常用函数:
push_back()在末尾添加元素。
pop_back()删除末尾元素。
insert(it,x):在迭代器it处插入元素x。
erase(): 1)erase(it)删除it处元素。
2)erase(first,last):删除[first,last)范围内的元素。
6.2 set
#include<set>
using namespace std;
set<typename> name;
set<typename>::iterator it;set(集合)只能通过迭代器访问。
set中元素自动递增排序,且自动去除重复元素。
set常用函数:
find(value)返回set中对应值为value的迭代器。
erase(): 1)st.erase(it)删除it所指元素
st.erase(value)删除值为value的元素。
2)st.erase(first,last) 删除[first,last)的元素。
6.3 string
#include<string>
using namespace std;
string<typename> name;注意:string头文件和string.h是不同的头文件。
通过下标访问和char数组相同。
注意:string类输出只能使用cout。要使用printf需要调用c_str();
string str;
......
cout << str;
printf("%s",str.c_str());通过迭代器访问,string的迭代器定义方法略有不同:
string::iterator it;string常用函数:
operator+=直接将两个string拼接。
compare operator:==,!=,<,<=,>,>=,比较的是字典序。
length()/size()均能返回string的长度。
insert():1) insert(pos,string)在pos位置插入string。
2)insert(it,it2,it3)在it位置插入字符串(it2,t3为收尾迭代器),[it2,it3)。
erase():1)str.erase(it)删除it所指字符。
2)str.erase(first,last)删除[first,last)区间字符。
str.erase(pos,length)删除从pos位置起length个字符。
substr():substr(pos,len)返回从pos位起长度为len的子串。
string::npos=-1作为find函数失配时返回值。
find(): str.find(str2)如果str2是str子串,返回第一次出现位置,失配返回string::npos;
str.find(str2,pos)从pos开始查找str2子串。
replace(): str.replace(pos,len,str2)把str从pos位开始长度为len的子串替换为str2.
str.replace(it1,it2,it3)把str的[it1,it2)替换为str2。
6.4 map
map可将任意基本类型(含STL容器)映射到任何基本类型(含STL容器)。
#include<map>
using namespace std;
map<typename1,typename2> mp;typename1是键的类型,typename2是值的类型。
字符串到数组的映射,必须使用string。
通过下标访问mp[key]即可访问,因为map的键唯一。
通过迭代器访问
map<typename1,typename2>::iterator it;map使用it->first访问键,it->second访问值。
map会按照键从小到大自动排序。
常用函数:
erase():1) mp.erase(it)删除it所指键值对。
mp.erase(key)删除键key所表示的键值对。
2)mp.erase(first,last) 删除迭代器[first,last)所指键值对。
6.5 queue
queue只能通过front()访问队首元素,back()访问队尾元素。
使用pop()和front()需要用empty()判断队列是否为空。
6.6 priority_queue
#include<queue>
using namespace std;
priority_queue<typename> name;只能通过top()访问优先队列的队首元素。
优先队列按照优先级对队内元素自动排序,自动将优先级最高的元素排在top,不能使用front()、back()访问。
priority_queue内元素优先级设置:
(1)基本数据类型优先级设置:
priority_queue<int> q;
priority_queue<int,vector<int>,less<int> > q;通过第一种方式定义,优先级:数值越大,优先级越高,或字典序越大,优先级越高。
第二种定义方式,vector<>,less<>中数据类型要与优先队列元素数据类型保持一致,
less<>表示数字越大,优先级越高;greater<>表示数字小的优先级高。
(优先队列的优先级设置与sort函数的比较函数相反)
(2)结构体的优先级设置
需要重载运算符<
struct fruit{
string name;
int price;
friend bool operator < (fruit a,fruit b){
return a.price < b.price;
//表示价格高的优先级高。
}
}6.8 pair
使用pair需要添加utility头文件或者map头文件。
pair<typename1,typename2> p;定义时初始化加上(元素1,元素2)即可
可以临时构建pair
pair<string,int>("haha",5)
make_pair("haha",5)以p.first和p.second分别访问pair的两个元素。
比较操作数,先以first大小作为比较标准,当first相同时比较second。
用途:
代替二元结构体及其构造函数,
作为map的键值对来插入。
//功能一:简化二元结构体定义
struct _pair{
typename1 first;
typename2 second;
}
pair<typename1,typename2> p;
//功能二:用于map键值对插入
map<string,int> mp;
mp.insert(make_pair("haha",5));6.9 algorithm头文件下常用函数
6.9.3 reverse()
reverse(it, it2)将数组指针在[it,it2)之间元素,或者容器的迭代器在[it,it2)范围内元素进行反转。对于本身有序的容器不可用。
6.9.4 next_permutation()
给出一个序列在全排列中的下一个序列,当next_permutation已经达到全排列的最后一个时会返回false,可用作循环结束条件!
6.9.5 fill()
fill()把数组或容器某一段区间赋某个相同值。注意同memset()不同:
memset只能按字节赋值,而fill()按照元素赋值,即fill赋值可以是数组类型对应范围内的任意值。
6.9.6 sort()
sort(首元素地址,尾元素地址的下一个地址,比较函数(选填))
省略比较函数,默认对前面区间递增排序(char型数组默认按字典序)。
比较函数cmp的写法:
(1)基本数据类型数组排序
bool cmp(int a,int b){//或其他基本数据类型char double
return a<b;
//表示按照递增顺序排列
return a>b;
//表示按照递减顺序排列
}(2)结构体数组排序
bool cmp(结构名 a,结构名 b){
return a.成员变量 > b.成员变量;
//按照该成员变量递减排序
return a.成员变量 < b.成员变量;
//按照该成员变量递增排序
}(3)其他容器排序:
仅有string、vector、deque允许排序。
6.9.7 lower_bound()和upper_bound()
lower_bound(first, last, val)寻找[first,last)范围内第一个≥val元素的位置,返回指针或者迭代器。即val值的下边界。
upper_bound(first, last, val)寻找[first,last)范围内第一个>val元素的位置,返回指针或者迭代器。即val值的上边界。
Chapter 8 搜索专题
8.1 深度优先搜索(DFS)
深度优先搜索以“深度”作为关键词枚举所有完整路径。
DFS可以用模拟栈来实现,也可以使用递归实现,但递归也是通过系统栈来实现,本质上都是利用的栈的原理。
在每次分叉时,先将该分叉点入栈,再将子节点入栈,如果到达了死胡同,出栈,出栈检测是否还有其他子节点,如果有将另外的字节点入栈,反复进行上述操作,直到栈空为止。
递归中:递归式就是分叉口,递归边界就是死胡同。
剪枝:根据题目相关条件,当进行深度优先搜索时,如果到某个分叉口已经使得之后的节点都不能满足条件时,不再对该分叉口向下搜索了,可以降低无意义的运行时间。
深度优先搜索时需要标记节点是否已经访问过,否则会存在重复访问的问题。
8.2 广度优先搜索(BFS)
广度优先搜索以“广度”作为关键词,依次访问从该岔道口能够直接达到的所有节点。
广度优先搜索可以利用队列来实现。
从起点开始,对于每个分叉口,将所有支路节点依次进入队列,当这一层节点完全入队后,队首元素出队,从该元素继续向下广度优先搜索,直到达到死胡同。
广度优先搜索需要以是否进入过队列来作为标记,因为有可能还没访问该节点,该节点还在队列中,也会造成重复访问的问题。
对于STL的队列和栈来说,如果以结构为元素的话,入栈(入队)过程实际是创建了副本,如果需要修改原来的结构体内容,需要以指针作为元素。
Chapter 9 数据结构专题(2)
9.1 树与二叉树
9.1.1 树的定义与性质
树的性质:
1. 树可以没有结点,称为空树(root==NULL)。
2. 树的层次(layer)从根节点算起,根节点层次为1。
3. 结点的子树数量成为度(degree),树的度为最大的结点度。
4. 有n结点的树,边数一定是n-1;满足联通、边数=结点数-1的结构一定是树。
5. 叶节点的度为0,当树中只有一个节点(根节点)时,根节点也算作叶节点。
6. 结点深度:从根结点->该结点的深度值,树的深度=最大结点深度;
结点高度:最底层叶节点->该节点的高度值,树的高度=最大结点高度。
性质1和5常用作边界测试数据。
9.1.2 二叉树的递归定义
1. 要么二叉树没有结点,是空树;
2. 要么二叉树由根节点、左子树、右子树组成,且左右子树均为二叉树。
二叉树与度为2的树不同,二叉树严格区分左右子树。
两种特殊二叉树:
1. 满二叉树:每一层结点数都达到允许的最大结点数。
2. 完全二叉树:除最下面一层外,其余层的结点数都达到最大,且最底层只从左至右存在连续若干结点。
9.1.3 二叉树的存储结构和基本操作
存储结构:二叉链表。
基本操作中需要注意:
插入insert(node* &root,int x)必须使用引用,否则不能够正确插入。insert是根据条件插入,如果不满足条件会向下继续调用,如果不用引用,就不能把新产生的结点的指针赋给原来的二叉树的结点上。
完全二叉树可以使用数组存储,根据其特性。
对完全二叉树结点从上至下、从左至右依次编号(根节点编号为1),对于任意结点x,其左孩子一定是2x,右孩子一定是2x+1。
完全二叉树叶子结点个数为。
且数组存储的顺序正好是完全二叉树层序遍历的顺序。
9.2 二叉树的遍历
根据根节点访问的顺序:先序遍历,中序遍历,后序遍历(依靠DFS实现)
层序遍历(BFS实现)。
注意:层序遍历时,设置的队列,要以结点指针作为元素,否则不能实现对原树的修改。
只有中序遍历只能确定左右子树的结点,不能确定树的结构,必须有先序、后序、层序其一才能确定根节点。
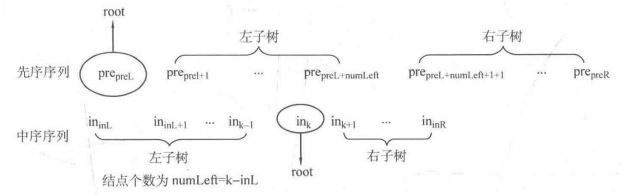
如果要根据先序或者后序以及中序确定树,需要去寻找具体的关系,以下是根据先序和中序,确定递归调用的参数。
当前先序区间是[preL,preR],中序区间[inL,inR]。当前根节点:pre[preL],in[k].左子树的结点数量为(k-inL)左子树的区间是:[preL+1,preL+k-inL],[inL,k-1]。右子树的区间是:[preL+k-inL+1,preR],[k+1,inR]。
//当前先序区间为preL,preR;中序区间为inL,inR,重建二叉树,返回根节点地址
node* create(int preL, int preR, int inL, int inR){
if (preL > preR) return NULL;
node* root = new node;
root->data = pre[preL];
int k;
for(int k = inL; k <= inR; k++){
if (in[k] == pre[preL]) break;
}
root->lchild = create(preL + 1, preL + k - inL, inL, k - 1);
root->rchild = create(preL + k - inL + 1, preR, k + 1, inR);
return root;
}9.2.5 二叉树的静态实现
静态二叉链表,左右指针域由int型代替(表示子节点在数组中的序号),二叉树以数组实现。
9.3 树的遍历
9.3.1 树的静态写法
以数组下标代替地址,子节点的地址需要用数组保存,或者采用vector容器,
struct node{
typename data;// 数据域
vector<int> child;//指针域
}9.3.2 树的先根遍历
先访问根节点,再访问所有子树。
void PreOrder(int root) {
;//访问当前节点
for (int i = 0, i < Node[root].size(); i++) {
PreOrder(Node[root].child[i]);
}
}对于叶节点,不会进入for循环,以此作为递归边界。
9.3.3 树的层序遍历
利用BFS原理即可实现。
9.3.4 从树的遍历看DFS和BFS
对于所有合法的DFS求解过程,可将分叉路口视作非叶节点,将死胡同视作叶节点,以此构造树的形式,树的先根遍历过程就是DFS遍历过程。
对所有合法的BFS求解过程,同样可以构造树,树的层序遍历就是BFS过程。
9.4 二叉查找树(BST)
9.4.1 二叉查找树的定义
1. 要么二叉查找树是一棵空树。
2. 要么二叉查找树由根节点、左子树、右子树组成,左子树和右子树都是二叉查找树,且满足:左子树结点数据域 ≤ 根节点数据域,右子树结点数据域 > 根节点数据域。
9.4.2 二叉查找树的基本操作
一、查找
时间复杂度O(h),h是树高。
二叉查找树的查找在于左右子树的选择,只需要在一条路径上查找,避免了在整棵树查找。
二、插入
二叉查找树的插入与查找类似,当在BST中查找x,而root为NULL时,说明查找失败,而在查找过程中可以确定,查找失败的地方就是应该插入的地方,所以在查找失败处插入新结点即可。
注意:同普通二叉树一样,BST的插入函数insert(node *&root, int x)必须使用引用,否则不能将新建结点正确链接到树上。
三、建立
依次将所有数据插入树即可。
四、删除
时间复杂度O(h)。
前驱:BST中比结点权值小的最大结点。左子树的最右孩子。
后继:BST中比结点权值大的最小结点。右子树的最左孩子。
删除操作:
1. root为NULL,结点不存在,直接返回。
2. 删除部分(比较搜索部分不作说明):
root不存在左、右孩子则为叶节点,直接删除,将root直接设置为NULL,父节点就引用不到他了。
root存在左孩子,在左子树中查找前驱pre,让pre的数据覆盖root,删除pre。
root存在右孩子,在右子树中查找后继next,让next数据覆盖root,删除next。
注意:deleteNode(node* &root, int x)函数仍然需要使用引用。
可以将删除pre和next进行优化,以pre的左子树作为pre的父节点的右子树,释放pre的空间;以next的右子树作为next父节点的左子树,释放next的空间,以此优化空间使用。
9.4.3 二叉查找树的性质
对二叉查找树中序遍历,遍历结果有序。
9.5 平衡二叉树(AVL)
9.5.1 平衡二叉树的定义
平衡因子:左子树的高度 — 右子树的高度。
AVL树:仍是一棵二叉查找树,只是对AVL树任意结点,平衡因子的绝对值 ≤1。
AVL树可以使树的高度在插入元素后仍能够保持O(logn)级别。
对于任意结点root,root的height=max(左子树height,右子树height)+1
9.5.2 平衡二叉树的基本操作
二、插入
1. 左旋
B的左子树->A的右子树
A->B的左子树
B->root

void L(Node* &root) {
Node* temp = root->rchild;
root->rchild = temp->lchild;
temp->lchild = root;
updateHeight(root);
updateHeight(temp);
root = temp;
}2. 右旋
A的右子树->B的左子树
B->A的左子树
A->root

void R(Node*& root) {
Node* temp = root->lchild;
root->lchild = temp->rchild;
temp->rchild = root;
updateHeight(root);
updateHeight(temp);
root = temp;
}
注意:左旋和右旋过程中,修改root之前,更新结点高度时,必须先更新两者中作为子节点(root)的高度,否则在后续高度更新过程中会产生错误。
3. 插入操作
只要将最靠近插入结点的失衡结点调整到正常,路径上所有节点都会正常。
四种失衡情况:第一个字母表示root左/右高度高,第二个字母表示root高的字节点的左右侧高度情况。

LL型:右旋(root)
LR型:左旋(root->lchild),右旋(root)
RR型:左旋(root)
RL型:右旋(root->rchild),左旋(root)
void insert(Node*& root, int data) {
if (root == NULL) {
root = new Node;
root->data = data;
return;
}
if (data < root->data) {
insert(root->lchild, data);
updateHeight(root);//递归调用插入后,会更新该路径上所有节点的高度
if (getBanlanceFactor(root) == 2) {
if (getBanlanceFactor(root->lchild) == 1)R(root);
else if (getBanlanceFactor(root->lchild) == -1) {
L(root->lchild);
R(root);
}
}
}
else {
insert(root->rchild, data);
updateHeight(root);
if (getBanlanceFactor(root) == -2) {
if (getBanlanceFactor(root->rchild) == -1)L(root);
else if (getBanlanceFactor(root->rchild) == 1) {
R(root->rchild);
L(root);
}
}
}
}注意查看注释如何更新结点高度。
9.6 并查集
9.6.1 并查集的定义
并查集支持:合并两个集合,查找:判断两个元素是否在同一集合中。
用数组表示集合father[N],father[i]表示元素i的父节点,如果father[i]==i,元素i是集合的根节点。同一个集合只有一个根节点,将其作为所属集合标识。
9.6.2 并查集的基本操作
一、初始化
令所有father[i]=i
二、查找
反复查找,直到满足father[i]==i。可以修改代码,在查找过程中将所有属于同一集合的结点的father[x]赋值为根节点(实现方式见9.6.3 路径压缩)。
三、合并
1. 判断是否属于同一个集合
2. 不属于同一集合之后合并,合并过程中,将一个集合的根节点的父亲指向另一个集合的根节点。
void Union(int a, int b){
int faA = findFather(a);
int faB = findFather(b);
if(faA != faB){
father[faA] = faB;
}
}9.6.3 路径压缩
修改findFather()函数,将当前查询结点路径上所有节点的父亲都指向根节点。
int findFather(int x) {
int a = x;//保存查询起点
while(x != father[x]){
x=father[x];
}//寻找根节点
while(a != father[a]){
int z = a;
a = father[a];
father[z] = x;
}//将从查询起点起的路径上所有的结点的父亲修改为根节点
return x;
}9.7 堆
9.7.1 堆的定义与基本操作
一、堆的定义:堆是一个完全二叉树。
大顶堆:每个结点的值 ≥孩子结点的值。每个结点的值都是以其为根节点的子树的最大值。
小顶堆:每个结点的值≤孩子结点的值。每个结点的值都是以其为根节点的子树的最小值。
下列操作以大顶堆为例:
二、堆的初始化:先根据输入顺序,建立完全二叉树,再“从下往上,从右往左”进行向下调整。
向下调整:将当前节点V与左(L)右(R)孩子比较,假如孩子中存在比V大的,交换V和较大孩子的权值;交换完毕后,再次比较,直到V比孩子的权值都大,或V不存在孩子。
时间复杂度为O(logn)
//对heap数组在[low,high]区间向下调整,
//low为欲调整数组下标,high一般为最后一个元素数组下标
void downAdjust(int low, int high) {
int i = low, j = i * 2;
while(j <= high) {//存在孩子结点
if(j + 1 <= high && heap[j + 1] > heap[j]){
j = i + 1;
}//j保存权值最大的孩子结点
if(heap[j] > heap[i]) {
swap(heap[j], heap[i]);
i = j;
j = 2 * i;
}//如果较大权值孩子结点比当前节点大,当前节点向下调整。
else{
break;//孩子结点都比当前节点小,调整结束。
}
}
} 建堆就只需要对非叶节点进行向下调整,所以 i 从倒着枚举到1,在[i,n]的范围进行调整。
三、删除结点:
删除堆顶元素:以最后一个元素覆盖堆顶元素,然后对根节点进行向下调整。
四、添加元素:
添加元素:将欲添加元素放在数组最后,然后向上调整:
把欲调整元素与父元素比较,如果比父元素大,交换父元素和欲调整元素。直到到达堆顶或者权值比父节点小为止。
时间复杂度为O(logn)。
向上调整代码:
//对heap数组在[low,high]区间向上调整,
//low一般为1,high表示欲调整元素
void upAdjust(int low, int high) {
int i = high, j = i / 2;
while(j >= low) {
if(heap[j] < heap[i]) {
sawp(heap[j], heap[i]);
i = j;
j = i / 2;
}
else{
break;
}
}
}添加元素代码:
void insert(int x) {
heap[++n] = x;
upAdjust(1, n);
}9.7.2 堆排序
堆排序取出堆顶元素,将堆的最后一个元素替换至堆顶,再将堆顶元素向下调整,重复上述操作,直到只剩一个元素。
倒着遍历数组,假设访问 i 号位,将堆顶元素与 i 号位元素交换,在[1,i-1]对堆顶元素向下调整。
void heapSort( ) {
createHeap();//如果已经有堆了就不需要建堆操作
for(int i = n; i > 1; i--) {
swap(heap[1], heap[i]);
downAdjust(1, i - 1);
}
}9.8 哈夫曼树
9.8.1 哈夫曼树
叶节点的带权路径长度 = 叶节点权值 x 路径长度
树的带权路径长度 = 叶节点带权路径长度
哈夫曼树的建立:
将初始状态下n个结点视作n棵树,合并根节点权值最小的两棵树,生成两棵树根节点的父节点,权值为二者之和,再将n-1棵树进行上述操作,直到只剩一棵树为止。
可以用优先队列实现建立哈夫曼树,下列代码是求哈夫曼树的带权路径长度:
#include<cstdio>
#include<queue>
#include<vector>
using namespace std;
priority_queue<long long, vector<long long>, greater<long long>> q;//代表小顶堆的优先队列
int main() {
int n;
long long temp, x, y, ans = 0;
scanf("%d",&n);
for(int i = 0; i < n; i++) {
scanf("%lld", &temp);
q.push(temp);
}
while(q.size() > 1) {
x = q.top();
q.pop();
y = q.top();
q.pop();
q.push(x + y);
ans += x + y;
}
printf("%d",ans);
return 0;
}Chapter 10 图算法专题
10.2 图的存储
一、邻接矩阵法:
设图G有N个结点,令二维数组G[N][N]表示图,G[i][j]为0表示顶点 i 和顶点 j 之间没有边,如果为k,则说明 i 和 j 之间有一条权为k的边。
读入邻接矩阵时,对于无向图,一定要保证G(i,j)=G(j,i),否则在后续处理过程中会产生错误。
二、邻接表法:
把同一个顶点所有出边放在同一个列表中,N个结点就会有N个列表,这N个列表即为图G的邻接表。
如果邻接表只存储终点编号,不存放边权,则这N个列表为int型vector即可。
如果邻接表需要存储边权,则N个列表用Node型vector。
//不存储边权
vector<int>Adj[N]
//需要存储边权
struct Node {
int v;//顶点编号
int w;//边权
}
vector<Node>Adj[N]10.3 图的遍历
10.3.1 深度优先搜索(DFS)遍历图
连通分量:无向图中,两点之间可互相到达,则两顶点连通,如果无向图G(V,E)任意两点均连通,则称G为连通图。
强连通分量:有向图中,两顶点之间能够互相到达(注意方向),则两顶点强连通,如果有向图G(V,E)任意两点均互相强连通,则称G为强连通图。
对图的DFS遍历就是对这个图所有的连通块(连通分量或强连通分量)分别遍历。
DFS遍历图的基本思想是:将经过的顶点设置为已访问,在下一次递归碰到这个顶点不做处理,直到整个图的顶点都被标记为已访问。
DFS遍历图的伪代码:
DFS (u) {
vis[u] = true;
for(从u出发所有能够到达的顶点v)//枚举从u出发的所有节点,深度优先
if (vis[v] == false) DFS(v);//如果v未被访问,访问之
}
DFSTrave(G) {
for(G的所有顶点u) {
if(vis[u] == false) {
DFS(u);//确保每个连通块都能被完全访问。
}
}
}10.3.2 广度优先搜索(BFS)遍历图
BFS遍历图的基本思想是:建立一个队列,把初始顶点加入队列中,此后每次都去队首顶点进行访问,并把从该顶点出发可到达的未曾加入过队列的顶点全部加入队列,直到队列为空。
BFS遍历图的伪代码:
BFS(u) {
queue q;
将u加入队列;
inq[u] = true;
while(q非空) {
取q的队首元素u访问;
for(所有能从u到达的顶点v) {
if (inq[v] == false){
将v入队;
inq[v] = true;
}
}
}
}
BFSTrave(G) {
for(G所有顶点u) {
if(inq[u] == false) {
BFS(u);
}
}
}10.4 最短路径
10.4.1 Dijkstra算法
Dijkstra算法用于解决单源最短路问题(从同一点出发,到图中各点路径最短)。
Dijkstra算法思想:对图G(V,E)社指集合S,存放已经访问的顶点,然后从集合V-S中选择与起点s的最短距离最小的顶点记为u,访问并加入集合S,之后令顶点u为中介点,优化起点s与所有可以经过u到达的点v之间的最短距离。
Dijkstra算法伪代码:
Dijkstra(G, d[], s) {
初始化;
for(循环n次) {
u = 使d[u]最小的还未被访问的顶点的标号;
记u已被访问;
for(从u出发能到达的所有顶点v) {
if(v未被访问 && 以u为中介点使s到顶点v的最短距离d[v]更优) {
优化d[v];
}
}
}
}注意:Dijkstra算法只能解决所有边权都是非负数的情况。
如果需要输出最短路径,可以在Dijkstra算法 if(.....)优化 d[v] 处增加将u赋给pre[v]的操作,如此,pre数组就可记录各点的前驱,输出s到v最短路径时,就从pre[v]开始递归,直到到达s点。
针对题目,Dijkstra算法可以做的优化(这些优化都只在优化d[v]的步骤进行优化):
以邻接矩阵法为例:
1. 给每条边增加边权,要求最短路径有多条时,输出该边权之和最小(或最大)。
增加 cost[u][v] 表示从u到v的边权,用c[u]表示从s到u的边权之和。初始化时 c[s]=0;其他都设置为INF。
如果对于中介点u,d[v]不变,但是边权之和能够减小时,优化c[v]。
for (int v = 0; v < n; v++) {
//如果v未访问,且u能到达v
if(vis[v] == false && G[u][v] !=INF) {
if(d[u] + G[u][v] < d[v]) {
d[v] = d[u] + G[u][v];
c[v] = c[u] + cost[u][v];
}
else if(d[u] + G[u][v] == d[v] && c[u] + cost[u][v] < c[v]) {
c[v] = c[u] + cost[u][v];
}
}
}2. 给每点增加点权,要求最短路径有多条时,输出点权和最大(或最小)。
以 weight[u] 表示点 u 的点权,w[u] 表示从 s 到 u 的点权之和。初始化时 w[s] = weight[s],其他点都为0。
如果对于中介点u,d[v]不变,但是点权之和能够增大时,优化c[v]。
for (int v = 0; v < n; v++) {
//如果v未访问,且u能到达v
if(vis[v] == false && G[u][v] !=INF) {
if(d[u] + G[u][v] < d[v]) {
d[v] = d[u] + G[u][v];
w[v] = w[u] + weight[v];
}
else if(d[u] + G[u][v] == d[v] && w[u] + weight[v] > w[v]) {
w[v] = w[u] + weight[v];
}
}
}3. 直接问最短路径条数。
增加数组num[],num[u] 表示 s 到 u 的最短路径数。
如果从中介点 u 能让 v 简化,则到 v 的最短路径数与 u 相同;如果正好相等,说明到 v 能够增加 num[u] 条最短路径。
for (int v = 0; v < n; v++) {
//如果v未访问,且u能到达v
if(vis[v] == false && G[u][v] !=INF) {
if(d[u] + G[u][v] < d[v]) {
d[v] = d[u] + G[u][v];
num[v] = num[u];
}
else if(d[u] + G[u][v] == d[v]) {
num[v] += num[u];
}
}
}使用Dijkstra算法记录所有最短路径。
因为需要记录所有最短路径,每个结点会存在多个前驱结点,所以用vector<int> pre[maxn]记录前驱结点,对于每个结点 v,pre[v] 是一个变长数组,可以存放节点v所有能产生最短路径的前驱结点。修改之后的代码:
for (int v = 0; v < n; v++) {
//如果v未访问,且u能到达v
if(vis[v] == false && G[u][v] !=INF) {
if(d[u] + G[u][v] < d[v]) {
d[v] = d[u] + G[u][v];
pre[v].clear();
pre[v].push_back(u);
}
else if(d[u] + G[u][v] == d[v]) {
pre[v].push_back(u);
}
}
}之后可以利用DFS获取所有最短路径。
根据pre数组可以生成一棵递归树,每次从根节点到达叶子结点可以得到一条完整的最短路径。计算第二标尺的值,可以选择得到题目需要的解。
int optvalue;//第二标尺最优值
vector<int> pre[maxn];
vector<int> path,tempPath;//最优路径,临时路径
void DFS(int v) {
if(v == s) {
tempPath.push_back(v);
int value;
计算路径tempPath上的value值;
if(value 优于 optvalue) {
optvalue = value;
path = tempPath;
}
tempPath.pop_back();
return;
}
tempPath.push_back(v);
for(int i = 0; i < pre[v].size(); i++) {
DFS(pre[v][i]);
}
tempPath.pop_back();
}10.4.2 Bellman-Ford算法和SPFA算法
10.4.3 Floyd算法
Floyd算法解决全源最短路问题,求图G(V,E)中任意两点 u,v 之间的最短路径,时间复杂度为O(n^3)。
Floyd算法伪代码:
枚举顶点k ∈[1,n]
以顶点k作为中间结点,枚举所有对i和j(i∈[1,n],j∈[1,n])
如果dis[i][k] + dis[k][j] < dis[i][j]成立
dis[i][j] = dis[i][k] + dis[k][j];10.5 最小生成树
10.5.1 最小生成树及其性质
最小生成树:在无向图G(V,E)中求一棵树T,T含有G所有顶点,且所有边来自G,并且满足整棵树的边权之和最小。
最小生成树的性质:
1. 最小生成树,边数=顶点数-1,且不存在环。
2. 对于给定图G,最小生成树可能不唯一,但是边权之和一定唯一。
3. 最小生成树在无向图G中生成,根节点可以是任意结点。
Prim算法和Kruskal算法都采用贪心思想,可用于求最小生成树。
10.5.2 Prim算法
基本思想:设置集合 S,存放已经访问的顶点,每次从集合 V-S 中选取与集合 S 的最短距离最小的一个顶点 u,访问并加入 S;以 u 为中介点,优化所有从 u 能够到达的顶点 v 与集合 S 之间最短距离,重复上述 n 次操作。
Prim算法:优化顶点 v 到集合 S 的最短距离;
Dijkstra算法:优化顶点 v 到起点 s 的最短距离。
具体实现:
1. 集合 S 的实现:用一个bool型数组 vis[] 表示顶点是否已经访问,true表示已访问,false表示未访问。
2. 与集合S的最短距离:用int型数组 d[] 存放顶点 Vi 与集合 S 的最短距离,初始时,只有起点s的d[s]赋值为0,其余顶点都赋一个很大的数INF。
伪代码:
//G为图,一般设置为全局变量,数组d为顶点到集合S的最短距离
Prim (G,d[]) {
初始化;
for(循环n次) {
u=使d[u]最小的还未被访问的顶点;
记u已经访问;
for(从u出发能够到达的所有顶点v) {
if(v未被访问&&以u为中介使得v与集合S的最短距离d[v]更优){
将G[u][v]赋值给v与集合S最短距离d[v];
}
}
}
}时间复杂度是O(V^2),邻接表实现的prim算法可以通过堆优化使时间复杂度降低到O(VlogV+E)。prim 算法一般用于顶点数较少、边数较多的情况。
10.5.3 Kruskal算法
Kruskal算法采取边贪心的策略。
基本思想:每次选择最小边权的边,如果边的两个顶点不在同一个连通块,将这条边加入最小生成树。
1. 对所有边按照边权从小到大排序
2. 按边权从小到大测试所有边,如果当前边的两个顶点不在同一个连通块中,则把这条测试变加入当前最小生成树中;否则,丢弃。
3. 执行步骤2,直到最小生成树的边数等于总边数-1,或者测试完所有边时结束。当结束时,如果最小生成树的边数小于总顶点数-1,则该图不连通。
Kruskal算法用一个结构体保存边,(顶点u,v;边权cost)
伪代码:
int Kruskal(){
令最小生成树边权之和为ans,最小生成树的当前边数Num_Edge;
将所有边按权从小到大排序;
for(从小到大枚举所有边) {
if(当前测试边的两个端点在不同的连通块中){
将该测试边加入最小生成树;
ans += 测试边边权;
Num_Edge++;
当边数Num_Edge等于顶点数-1时结束循环;
}
}
return ans;
}判断测试边两个端点是否在同一连通块、将测试边加入最小生成树,需要使用到并查集。
Kruskal算法的时间复杂度是O(ElogE)。
10.6 拓扑排序
10.6.2 拓扑排序
拓扑排序是将有向无环图(DAG)G的所有顶点排成一个线性序列(拓扑序列),使得对图G中任意两个顶点 u,v ,如果存在边 u->v,则在序列中 u 一定在 v 前面。
基本思想:
1. 定义一个队列,将所有入度为0的结点加入队列
2. 取队首顶点,输出。删除所有从他出发的边(可以不删去),并将这些边到达的顶点的入度减1,如果某个结点的入度减为0,将其入队。
3. 反复进行第2步,直到队列为空。如果队列为空时如果队的节点数目恰好为N,则拓扑排序成功,G为有向无环图,否则,拓扑排序失败,G中有环。
10.7 关键路径
10.7.1 AOV网和AOE网
AOV网:顶点活动网,用顶点表示活动,边表示活动间优先关系的有向图。
AOE网:边活动网,以带权边集表示活动,用顶点表示事件的有向图。边权表示活动需要时间。事件:前面的活动已经结束。
AOV网和AOE网都不应该有环。
AOE网中最长路径就是关键路径,关键路径上的活动是关键活动。
关键路径总是选择最长道路,也是完成所有活动的最短时间。
10.7.2 最长路径
对于没有正环的图,要求最长路径,将所有边权乘以-1,使用Bellman-Ford算法或者SPFA算法求最短路径长度,将结果取反即可得到。
如果图中有正环,最长路径不存在。
10.7.3 关键路径
设置数组 e 和 l ,其中 e[r] 和 l[r] 表示活动ar的最早开始时间和最晚开始时间。
设置数组 ve 和 vl ,其中 ve[i] 和 vl[i] 分别表示事件 i 的最早发生时间和最迟发生时间。
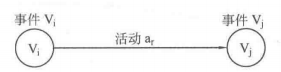
对于活动ar,Vi最早发生时ar立刻进行,则ar发生时间最早,e[r]=ve[i] ;
如果 l[r] 是ar最迟发生时间,那么 l[r] + lenght[r] 就是事件 Vj 的最迟发生时间,所以 l[r]=vl[j]-legnth[r];
假设Vj可以由 Vi1~Vik达到,那么
如果要获得 ve[j] 的正确的值,那么ve[i1]~ve[ik]必须已经得到,即在访问某结点时,其前驱结点都已经访问完毕,拓扑排序可以实现。
修改后拓扑排序代码:
stack<int> topOrder;
bool topologicalSort() {
queue<int> q;
for(int i = 0; i < n; i++) {
if(inDegree[i] == 0) {
q.push(i);
}
}
while(!q.empty()) {
int u = q.front();
q.pop();
topOrder.push(u);
for(int i = 0; i < G[u].size(); i++) {
int v = G[u][i].v;
inDegree[v]--;
if(inDegree[v] == 0) [
q.push(v);
}
//用ve[u]来更新u的所有后继结点v
if(ve[u] + G[u][i].w > ve[v] ) {
ve[v] = ve[u] +G[u][i].w;
}
}
}
if(topOrder.size() == n) return true;
else return false;
} 假设 Vi 能够达到 Vj1 ~Vjk,那么
如果要获得 vl[i] 的正确的值,那么vl[j1]~vl[jk]必须已经得到,即在访问某结点时,其后继结点都已经访问完毕,逆拓扑排序可以实现。上述代码中topOrder栈出栈即是逆拓扑序列。
fill(v1, v1 +n , ve[n-1] );
while(!topOrder.empty()) {
int u = topOrder.top();
topOrder.pop();
for(int i = 0; i < G[u].size(); i++) {
int v = G[u][i].v;
//用u的所有后继结点v的vl值来更新Vl[u]
if(vl[v] - G[u][i].w <vl[u]) {
vl[u] = vl[v] - G[u][i].w;
}
}
}总结:
1. 拓扑排序和你拓扑排序获得各顶点的最早发生时间和最晚发生时间
最早(拓扑):
最迟(逆拓扑):
2. 用上边结果计算各边最早开始时间和最晚开始时间
最早:e[i->j] = ve[i]
最晚:l[i->j] = vl[j] - length[i->j]
3. e[i->j] = l[i->j] 的活动即为关键活动。
Chapter 11 动态规划专题
11.1 动态规划的递归写法和递推写法
11.1.1 动态规划
最优化问题:动态规划将一个复杂问题分解为多个子问题,通过综合子问题的最优解来得到原问题的解。
最优子结构:一个问题的最优解能够通过子问题的最优解求出。
必须拥有重叠子问题和最优子结构才能通过动态规划解决。
递归写法也叫作记忆化搜索。
11.1.2 动态规划的递归写法
记忆化搜索:记录子问题的解,避免下次遇到相同子问题(重叠子问题)时重复计算。
递归写法是从顶向下,分解问题,直到分解到边界。
11.1.3 动态规划的递推写法
数塔问题:以二维数组 f[N][N] 存储每一层的数字,令 dp[i][j] 表示从第 i 行第 j 个数字到最底层路径能够得到的最大和。
要求得 dp[i][j] 就必须求得 dp[i+1][j] 和 dp[i+1][j+1] 中的最大值, 由此可以得状态转移方程:
递推边界:
//递推部分代码
for (int i = n - 1; i >= 1; i--) {
for(int j = 1; j <= i; j++) {
dp[i][j] = max( dp[i+1][j], dp[i+1][j+1]) + f[i][j];
}
}递推写法是自底向上,从边界开始向上求解问题。
分治和动态规划的区别:
分治法分解出的问题是不重叠的,动态规划求解的问题拥有重叠子问题。
分治法求解的不一定是最优解问题,动态规划求解的是最优解问题。
贪心和动态规划的区别:
贪心自顶向下解决问题,通过一种策略直接选择一种子问题求解,其他子问题放弃求解。
动态规划自底向上求解问题,每一种子问题都被求解了,最终选择最优的解。
11.2 最大连续子序列和
令状态 dp[i] 表示以 A[i] 作为结尾的连续序列的最大和,求解整个序列的最大连续子序列和就是求数组 dp 中的最大值。
对于 dp[i] 只有两种情况:
1.最大和的连续序列只有一个元素,以 A[i] 开头,以 A[i] 结尾。
2.最大和的连续序列有多个元素,从某处 A[p]开始,A[i] 结尾。
状态转移方程:
递推边界:
状态的无后效性:当前状态记录了历史信息,一旦当前状态确定,就不会再改变,未来的决策只能在已有的一个或若干个状态基础上进行。
设计状态和状态转移方程是动态规划的核心。
11.3 最长不下降子序列(LIS)
令 dp[i] 表示以 A[i] 结尾的最长不下降子序列的长度,对于 A[i] 有两种可能:
1.如果存在 A[i] 之前的元素 A[j](j<i)使得 A[j] ≤ A[i] 且 dp[ j ]+1>dp[ i ],那么就把 A[i] 跟在 A[j] 结尾的LIS后,形成一条更长的不下降子序列(dp[i] = dp[j] +1)
2.A[i] 之前的元素都比 A[i] 大,A[i] 自成一条LIS,长度为1。
状态转移方程:
递推边界:
11.4 最长公共子序列(LCS)
令 dp[i][j] 表示字符串 A 的 i 号位和字符串 B 的 j 号位之前的LCS的长度(下标从1开始)
1. 如果 A[i] == B[j] 则字符串A和B的LCS增加一位,即有 dp[i][j] = dp[i-1][j-1] +1
2. 如果 A[i] != B[j] 则字符串A和B的LCS不能增加,dp[i][j] = max (dp[i-1][j] , dp[i][j-1])
状态转移方程:
递推边界:
11.5 最长回文子串
令 dp[i][j] 表示 S[i] 至 S[j] 所表示子串是否是回文串,是则为1,不是则为0。
1. S[i]==S[j] ,只要S[i+1] 至 S[j-1] 是回文串,则 S[i] 至S[j] 就是回文串;如果S[i+1] 至S[j-1] 不是回文串,则S[i] 至S[j] 不是回文串。
2. S[i] != S[j] ,则S[i] 至S[j] 不是回文串。
状态转移方程:
边界:
第一遍将长度为3的子串的dp值求出,第二遍将长度为4的子串的dp值求出...,即可避免状态无法转移的问题。