目录
1介绍
图数据结构在很多位置都有引用,例如网络爬虫,地图应用(最近距离,最短时长推荐),社交网络分析(社交关系,好友推荐),舆情控制等领域。
2 图的基本概念
2.1 定义性质
图是由顶点集合(vex_set),边集合(arc_set)。
度:一个顶点与之相邻的边;对于有向图则分为出度和入度
2.2 分类
按照方向区分:有向图和无向图
按权重来区分:有向权重图,无向权重图。
按照功能来区分:连通图和非连通图
3 图的存储方式
图的存储主要是顶点和边。
常见的图的存储方式:链接矩阵和链接表
3.1 链接矩阵
顶点集合:用一维数组方式存储
边集合:用二维数组方式存储
出度:行 1的个数和
入度:列 1的个数和。
优点:很容易算出连接关系,以及结点的度。
缺点:存储空间复杂度大,空间利用率不高。对于无向图只需要存储一半。
3.2 链接表
实际工程中应用链接表。
顶点集合:一维数组存储
边集合:链接表
有向图
缺点:无法计算入度
无向图

优点:度比较好计算
逆链接表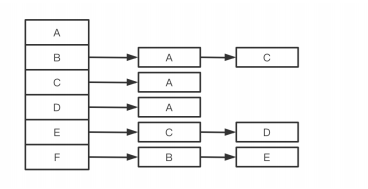
4 图的遍历
图的遍历方式主要两种:深度优先和广度优先,俗称dfs,bfs。
从图中某一个顶点触发,访问图中其余顶点,每个顶点被访问一次且只被访问一次。
可以从图中任意一点进行发起遍历。
1 缺点一条搜索路径
2 确保每个顶点都访问到
3 每个顶点只能被访问一次
设置辅助数组visited,数组元素的初始均为false,一旦遍历过后就设置为true.
4.1 dfs
深度优先:分有向图和无向图两类:
主要思想:利用递归,栈方式实现。加上本来就有辅助数组visited。
// 对图进行深度优先遍历 (不能遍历删除)
void DFSTraverse(vector<bool> &visited, VisitFunc func) {
for (size_t i = 0; i < _graph_vex.size(); i++) { // 有多个
if (!visited[i]) {
_dfs_traverse(i, visited, func);
}
}
}
// 回溯 函数堆栈来实现 实际开发过程 图纵深 尾递归
// 所有的递归 都能够转化为 递推
void _dfs_traverse(int idx, vector<bool> &visited, VisitFunc func) {
if (visited[idx]) return;
visited[idx] = true;
func(_graph_vex[idx]);
auto &arclist = _graph_arc[idx];
for (auto iter = arclist.begin(); iter != arclist.end(); iter++) {
int next = INDEX(*iter);
if (!visited[next]) {
_dfs_traverse(next, visited, func);
}
}
}
应用:
检测连通分量的个数;
两个点是否在⼀个连通分量中;
检测是否构成环;从⼀个点出发能否回到出发点;
4.2 bfs
广度优先:分有向图和无向图两类:
主要用队列来加上visited数组来实现。
// 对图进行广度优先遍历 (不能遍历删除)
void BFSTraverse(vector<bool> &visited, VisitFunc func) {
for (size_t i = 0; i < _graph_vex.size(); i++) { // 可能出现多个连通图
if (!visited[i]) {
_bfs_traverse(i, visited, func);
}
}
}
void _bfs_traverse(int idx, vector<bool> &visited, VisitFunc func) {
deque<int> queue;
queue.push_back(idx);
visited[idx] = true;
func(_graph_vex[idx]);
while (0 != queue.size()) {
int i = queue.front(); queue.pop_front();
auto &arclist = _graph_arc[idx];
for (auto iter = arclist.begin(); iter != arclist.end(); iter++) {
int next = INDEX(*iter);
if (!visited[next]) {
queue.push_back(next);
visited[next] = true;
func(_graph_vex[next]);
}
}
}
}
应用:
游戏中找寻路径问题;不过一般也不用这个,而是采用A*算法实现
5 dijkstra算法
该算法主要解决最短路径问题,采用贪心思想。
对象是:权重图
核心过程:每次从路径最短的点出发遍历相邻边,检测修改路径值(确保相邻点也最短),从未被确认路径最短的订单集合中选择最短路径的点,将该点加入确认路径最短的订单集合,并将该点作为下次遍历相邻边的出发点。
核心流程:更新,扫描,修改
void CGraph::Dijkstra(VexType s, vector<bool> &visited, vector<int> &dis, vector<int> &parend)
{
int iStart = _get_idx(s);
if (-1 == iStart) {count << "start not exists!" << endl;return;}
visited[iStart] = true;
dis[iStart] = 0;
parent[iStart] = iStart
int i = iStart;
while(true){
//更新 相连节点的距离信息
auto &arclist = _graph_arc[i];
int min = INF, midx = -1;
for(auto iter = arclist.begin(); iter != arclist.end(); iter++){
int idx = INDEX(*iter);
int wgt = WEIGHT(*iter);
if (dis[idx] > wgt + dis[i]){
dis[idx] = wgt + dis[i];
parent[idx] = i;
}
}
//扫描
for(size_t j = 0; j < dis.size(); j++){
if (!visited[j] && min > dis[j]){
min = dis[j];
midx = j;
}
}
if (midx == -1) break;
//重新选取点
visited[midx] = true;
i = midx;
}
}
6 动态规划hp
这块主要是寻找状态转移方程,如果找到了就解决了。
7 简单封装一个图类
代码:https://github.com/hengfengyaoren/Data-Structure-Algorithm/tree/main/graph