Yolov5转Tensorrt
整个过程参考: yolov5转tensorrt模型_JulyLi2019的博客-CSDN博客_yolov5转tensorrt
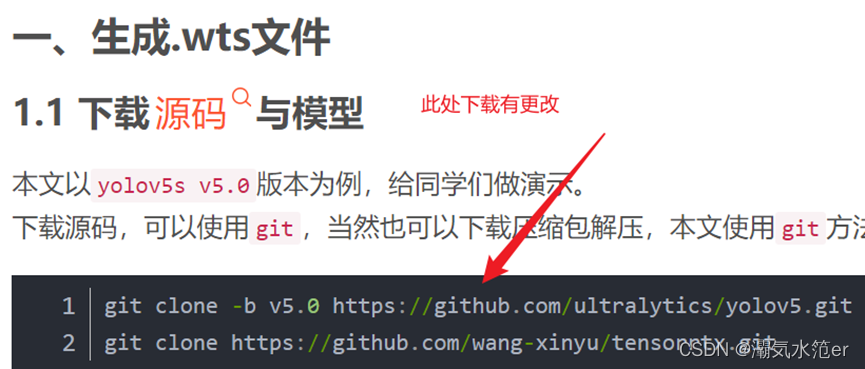
下载文件版本需对应,(下载参考Jetson AGX Xavier实现TensorRT加速YOLOv5进行实时检测_围白的尾巴的博客-CSDN博客_agx xavier yolo 中v5.0
文件位置关系如下:
)
下载pt模型文件,
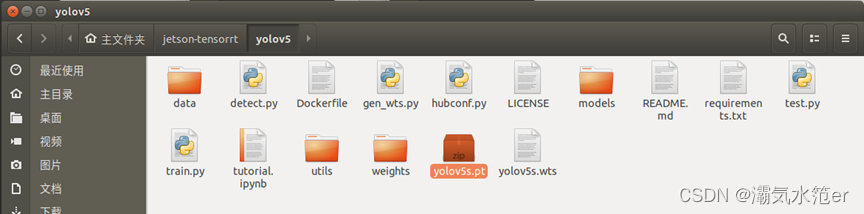
生成yolov5s.wts文件,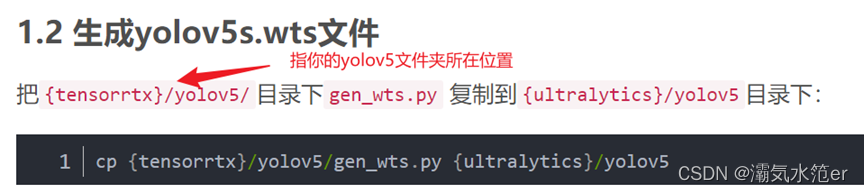
继续参考主链接往下进行,执行命令出错参考下面的评论
python gen_wts.py -w yolov5s.pt
build and run,
……(参考上面链接)
……
C++接口处理图片:
…/images为,当前要处理图片所在文件夹路径 (此文件夹为自己创建,已建好就不用再建,创建到yolov5/build下面)

比如当前终端在yolov5文件夹下,执行命令: sudo ./yolov5 -d yolov5s.engine ./images/
处理过的图片会生成在image同级目录下。至此此教程走完,可以c++接口处理图片。
Python接口由Jetson AGX Xavier实现TensorRT加速YOLOv5进行实时检测_围白的尾巴的博客-CSDN博客_agx xavier yolo
得知执行
命令为: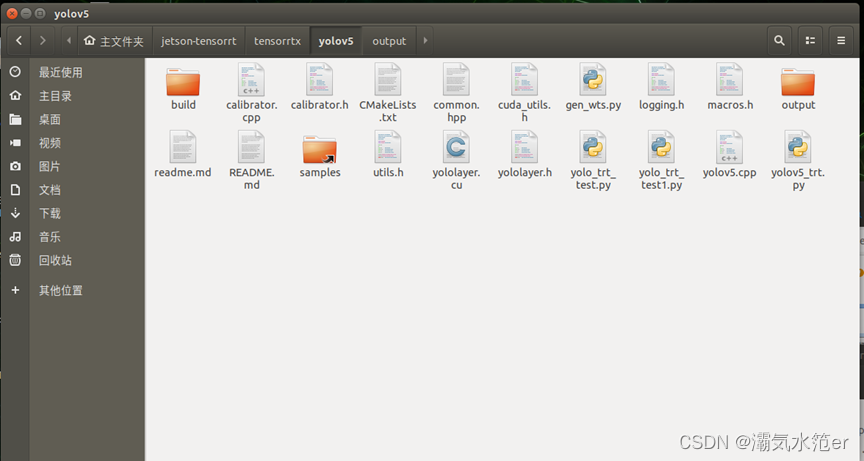
执行命令 :
python yolo_trt_test.py 加载处理图片 生成的图片在output文件夹内python yolo_trt_test1.py (或 python yolov5_trt.py) 处理相机画面 会卡死
(程序来源上面链接v5.0)
至此yolov5转tensorrt c++ python接口均配置成功
版权声明:本文为qq_52584391原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。