1、先实验一波urdf在rviz里面能否正常打开
2、运行:
roslaunch ur120 display.launch
会出现错误
ERROR: cannot launch node of type [robot_state_publisher/state_publisher]: Cannot
locate node of type [state_publisher] in package [robot_state_publisher]. Make sure
file exists in package path and permission is set to executable (chmod +x)
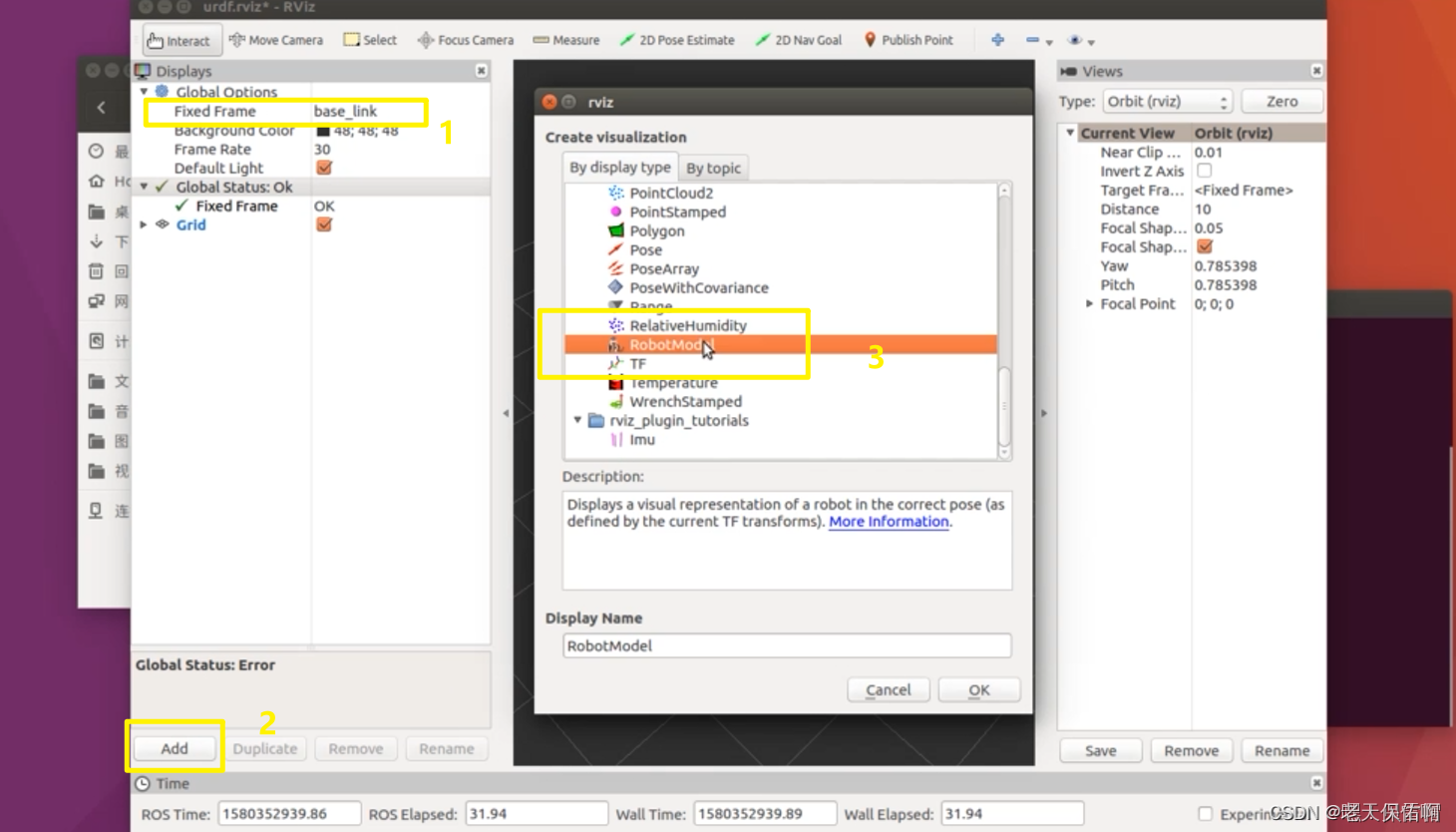
接着可以看到rviz里面也加载不出来正常模型
修改方法:这里,修改后效果如下:
版权声明:本文为weixin_42226781原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接和本声明。